 姿態傳感器和IMU的聯系和區別
姿態傳感器和IMU的聯系和區別
?
文章開頭,我們先看兩個術語:航向姿態參考系統(英文簡稱AHRS)和慣性測量單元(英文簡稱IMU)。今天,要圍繞這兩個我們不太熟悉的概念,來為您介紹一下,AHRS和IMU的在利用加速度傳感器、陀螺儀、磁力計等傳感器進行慣性測量等方面的聯系與區別,以及它們各自的適用領域。
在這之前,我們還需要先了解一下有關運動方面的一些基本知識。
運動分析簡介
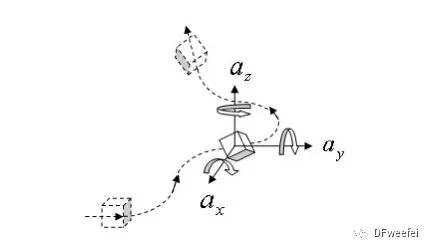
我們知道,在三維空間中若將物體視為剛體(不考慮形變),不管其運動多么復雜,都可以將該運動分解為該物體質心的曲線運動和繞質心的旋轉運動。該曲線運動通常可以用運動初始條件和加速度表示為:

?

而旋轉運動的角度可以用角速度和時間的方程式進行表示。在實際運動測量跟蹤中,通常是使用加速度計和陀螺儀對物體的加速度和旋轉角進行測量。
?
剛體三維運動解析
AHRS與IMU
AHRS(AttitudeHeadingReferenceSystem)全稱航向姿態參考系統,是利用加速度傳感器、陀螺儀以及電子羅盤對實際目標各運動參數和方位進行測量,通過對測量值加以處理和計算以對目標的位置和運動狀態進行實時跟蹤監控。
IMU(InertialMeasurementUnit)也稱慣性測量單元是利用加速度傳感器和陀螺儀對目標系統加速度和旋轉角速度進行測量,以得到目標在慣性參考系下的運動和狀態的裝置。
參考系統區別
從二者的定義上不難看出,AHRS進行測量時所選擇的參考系是地球自身,其測量對象的位置也是具體的地理位置。而IMU慣性測量單元則不同,其測量的是相對特定慣性參考系下的位置和運動狀態,該參考系可以是房屋、建筑等固定點或者勻速運動的系統。從概念上來說,慣性測量單元應用范圍更加廣泛,因為AHRS的參考點地球也是一個慣性參考系(并不絕對,僅限地球范圍。在太陽系內以太陽作為慣性參考系)。
?
9軸姿態檢測模塊
系統組成區別
盡管AHRS和IMU的測量元件基本上相同,但由于AHRS的參考系統不同,AHRS相比IMU要多出個磁力計。在AHRS進行運動軌跡和狀態監測時,由于陀螺儀時漂的問題,在對運動過程中的旋轉角度進行積分時,會隨著時間推移而誤差越來越大,因此,需要磁力計及時對運動的地理方位角度進行校準。
測量準確性
由于AHRS選擇地球作為參考系,并通過磁力計測量電磁場進行位置的校準,相比而言,不包含磁力計的慣性測量單元精度往往要更高。通過磁力計對地理方位角進行校準,固然可以在一定程度上提高準確性,然而磁力計自身誤差以及測量時漂和復雜磁場等因素的存在,同樣會導致測量的準確性下降。此外由于IMU參考系統的不確定性,通常其采用精確度和穩定性更好的陀螺儀,以保證旋轉角測量的準確性,當然相比而言,一般IMU的成本更高。

?

?
AHRS通常用在航空飛行測量、地面機動車輛遙控、無人飛行器跟蹤等領域中
應用范圍
由于AHRS對參照系的選擇,使得其應用領域不如IMU應用廣泛。AHRS通常可利用磁力計等傳感器,用在航空飛行測量、地面機動車輛遙控、無人飛行器跟蹤等領域中。由于IMU的參考系靈活變動性,慣性測量通常可用于室內軌跡推算、盲區導航、體感游戲、航天測算以及軍事慣性制導等方面。
?
-
IMU
+關注
關注
6文章
298瀏覽量
45678 -
慣性測量單元
+關注
關注
2文章
41瀏覽量
10424 -
AHRS
+關注
關注
0文章
24瀏覽量
14007 -
姿態解算
+關注
關注
0文章
49瀏覽量
8241
發布評論請先 登錄
相關推薦
《DNK210使用指南 -CanMV版 V1.0》第二十三章 六軸傳感器——姿態解算實驗
愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

lidar傳感器和激光測距傳感器的區別
電感傳感器和電容傳感器的區別
EPSON新品IMU傳感器M-G570PR投產,功能更強大!

變送器與傳感器有什么區別
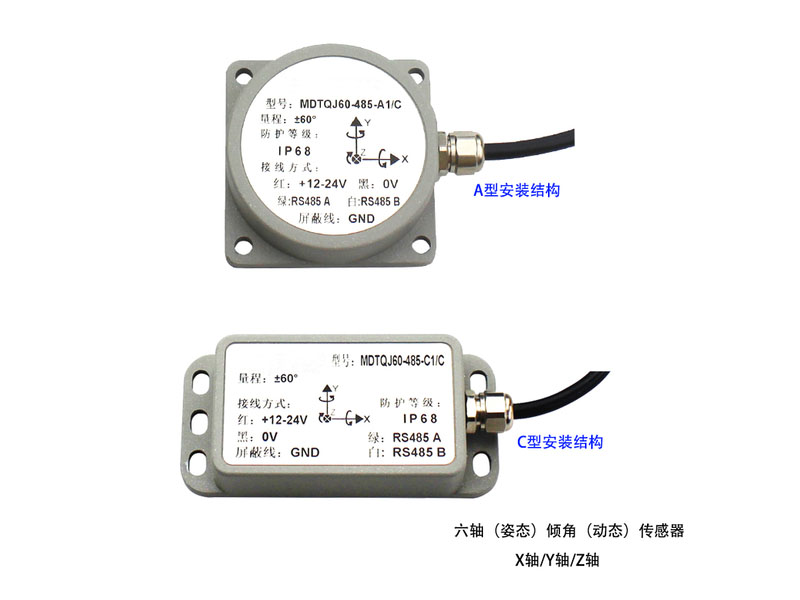
六軸姿態傾角動態傳感器
變送器與傳感器的區別
【核芯觀察】IMU慣性傳感器上下游產業梳理(二)
【核芯觀察】IMU慣性傳感器上下游產業梳理(一)
愛普生(EPSON)開發新IMU產品M-G370PDS改善姿態和震動控制





 工商網監
工商網監
評論