 正運動技術CAD導圖軟件配合控制器的使用方法
正運動技術CAD導圖軟件配合控制器的使用方法
CAD具有繪圖效率高,速度快,精度高,便于交流等優點,所以,得到了廣泛的應用。CAD伴隨著整個PC基礎工業的突飛猛進,正迅速而深刻地影響著設計和繪圖的基本方法。
在運動控制領域,CAD導圖軟件可以根據導入的圖形文件自動生成加工代碼,其代碼發送給控制器之后,便能控制軸運動出與圖形相同的軌跡。正運動技術這篇文章,主要介紹CAD導圖軟件操作方法及基本技巧,希望對相關工作人員提供幫助。
01 準備工作
一、材料準備
1.硬件
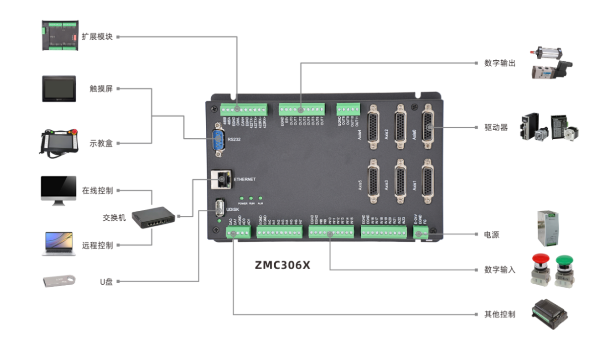
A.ZMC306X控制器一臺。
B.電腦一臺。
C.帶屏蔽層網線一根。
D.24V直流電源一個。
F.接線端子與連接線若干。
2.軟件
A.ZDevelop V3.10版本控制器編程軟件。
B.ZmotionCAD V1.0導圖工具。
均從正運動技術官網www.zmotion.com.cn下載壓縮包,解壓后直接運行應用程序,無需安裝。
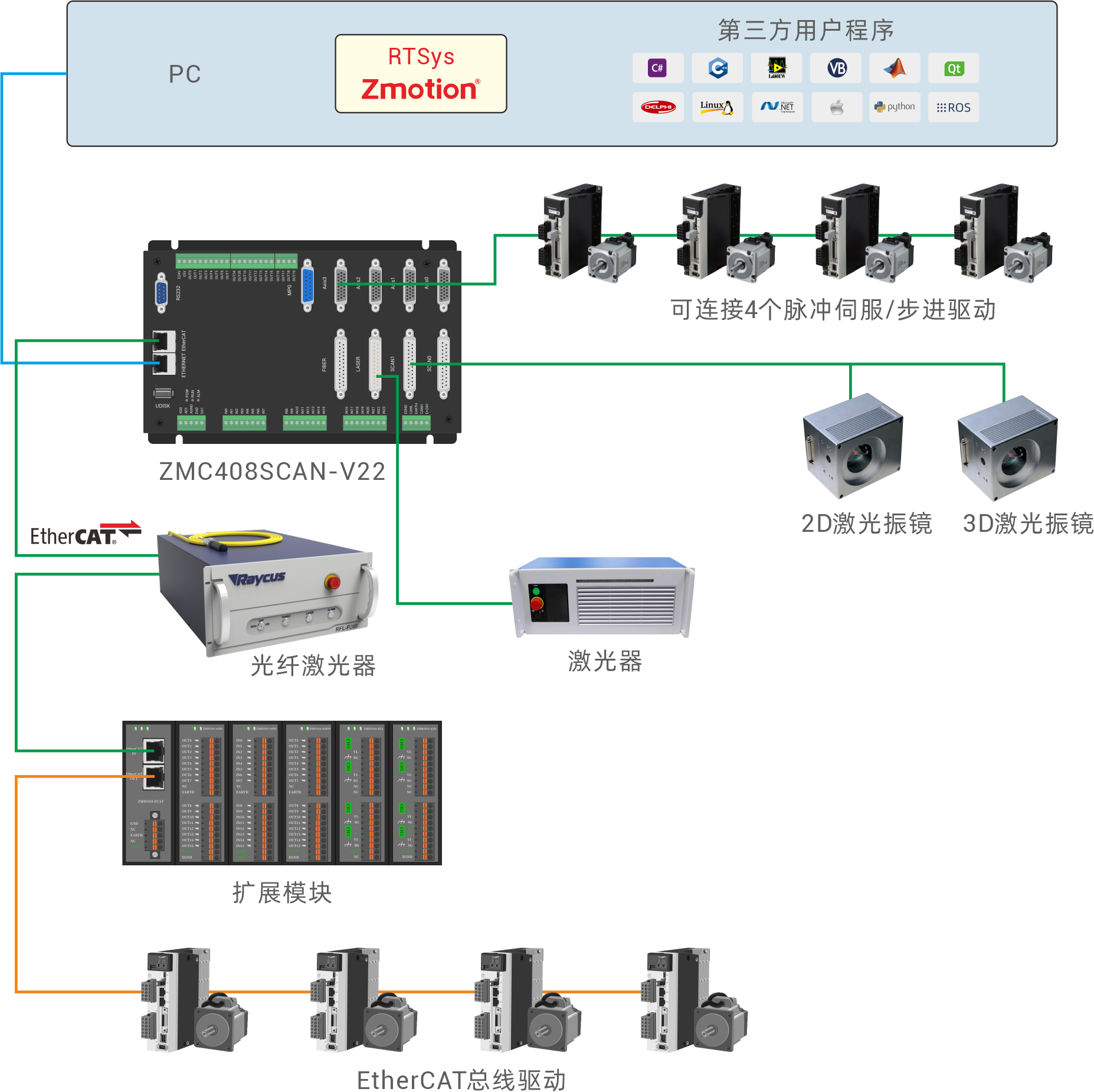
二、硬件接線
控制器接線:
舉例使用脈沖型控制器ZMC306X,若用總線型控制器,請選擇帶EtherCAT總線接口型號。
A.主電源:將控制器主電源接線端子上的E+24V端子接入24V直流電源正極,將EGND端子接入24V直流電源負極。
B.以太網EtherNET端口接線:使用一根網線將控制器的EtherNET端口與電腦的以太網口相連。
C.驅動器與控制器接線:將脈沖型驅動器按要求接入到脈沖軸接口上。
02 導圖流程
一、使用基本流程
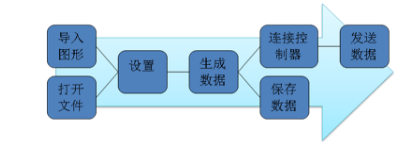
在正運動官方網站(www.zmotion.com.cn)下載CAD導圖軟件,打開軟件后,導入圖形(.dxf、.plt、.ai)或打開文件(導圖軟件生成的.zmo文件),軟件自動生成加工數據,若不滿意自動加工數據,可自定義設置后再刷新數據,重新生成加工軌跡數據,數據達到要求后可直接發送數據到控制器運行,或保存數據到磁盤,應用在其他場景。
可使用ZDevelop軟件連接到控制器監控運行效果。
注意此軟件不支持更改圖形。
二、導入圖形文件
按文件菜單下選擇“導入”,執行導入文件操作,打開導入對話框,軟件支持三種格式圖形文件導入,分別為.dxf文件、.plt文件、.ai文件。
1.導入的文件為dxf文件,軟件自動對圖形的數據進行排序,排序完成后在圖形界面自動生成加工圖形,如果您對軟件自動生成的加工圖形順序不滿意,使用自定義運動軌跡功能進行手工排序。
2.導入的文件為.plt格式,則需要先選擇繪圖單位,默認為1016,如圖:軟件會根據輸入的繪圖單位自動生成圖形。
3.導入的文件為.ai格式,軟件自動把文件中的數據轉化為mm單位,再自動生成圖形。
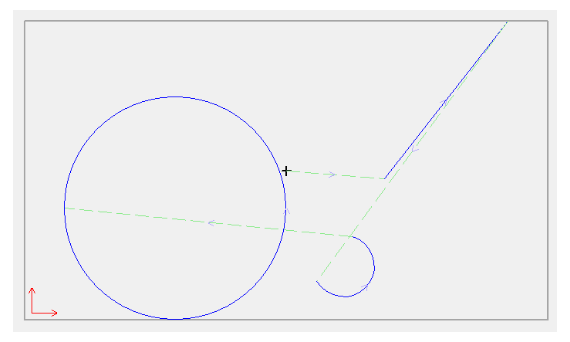
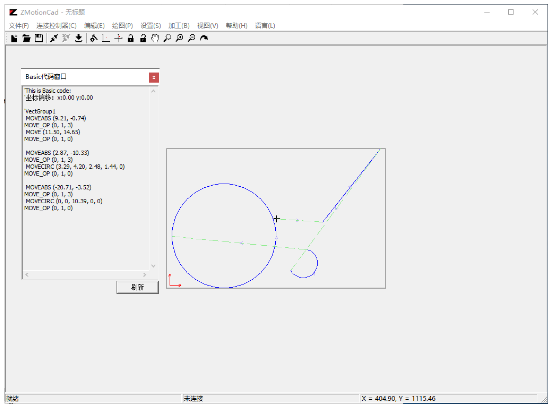
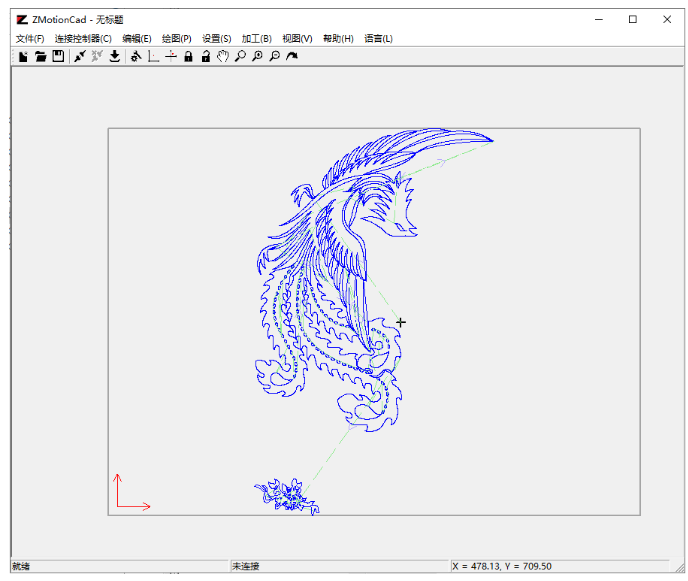
如下圖,藍色線條為要加工的軌跡,綠色線條為空走,箭頭表示加工的方向,中間的十字表示原點的位置。
軟件每次導入操作僅支持一個文件導入,若要導入多個文件,可以分多次導入操作進行導入,生成的圖形會以疊加的方式顯示。
三、打開文件
導入上述格式的文件,進行編輯后,若要保存編輯的信息,保存的格式為.zmo文件類型。
zmo格式文件是正運動技術開發的一種文件格式,是專門用來說明運動軌跡及運動屬性的一種文件格式,默認為絕對運動。
zmo文件除了保存了圖形文件的軌跡之外,還保存了用戶設置。
zmo格式文件是以對象和屬性的方式存儲,對象中有各種屬性,屬性描述對象,用戶可手動編輯。
四、設置(手動調整)
用戶導入文件后,系統會把圖形根據算法自動計算,得出加工軌跡代碼和加工順序,若用戶不滿意自動的效果,可以手動修改圖形的加工參數或順序。
(一)參數設置
在菜單欄“設置”打開“參數設置”窗口,參數默認設置如下圖,可自定義修改。
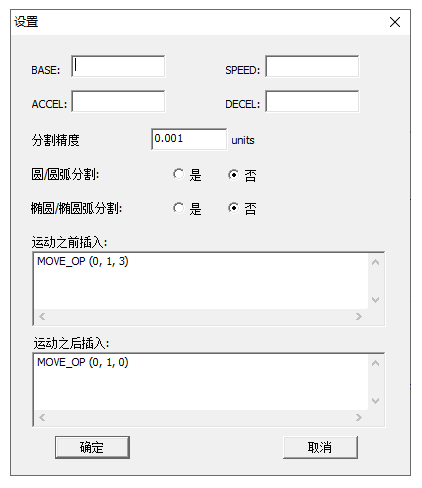
支持全局參數BASE、SPEED、ACCEL、DECEL的設置,指定軸號、軸加工速度等。
用戶可以設置分割的精度,當分割精度設置為0時,則表示不分割,使用系統默認生成的數據,可選是否需要分割圓/圓弧或橢圓/橢圓弧。
1.選擇“否”,則表示不分割所有的圓/圓弧或橢圓/橢圓弧。
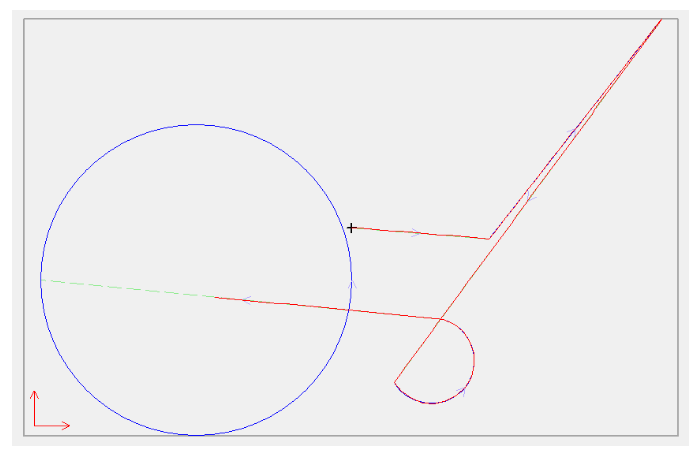
如下圖,圖形未分割,圓的軌跡由一條圓弧指令得出。
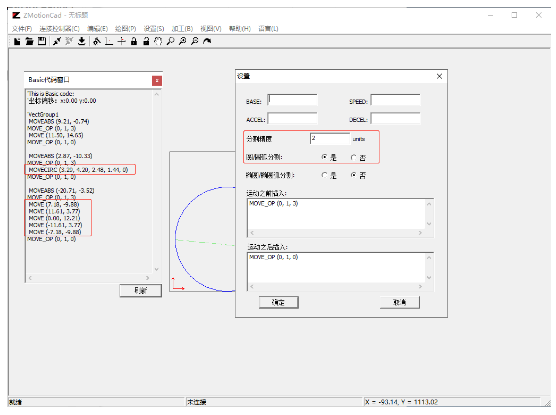
2.選擇“是”,則將弧線分割成若干小線段,精度為用戶設置的精度,如果設置的分割精度大于某段圓或圓弧半徑的1/2,則默認跳過此段圖形(即不分割此段圖形);如果設置的分割精度大于某段橢圓或橢圓弧短軸,則默認跳過此段圖形(即不分割此段圖形)。
如下圖,設置圓弧分割,分割精度為2units,大于小圓半徑的1/2,小圓不分割,大圓被分割成了五條直線段。
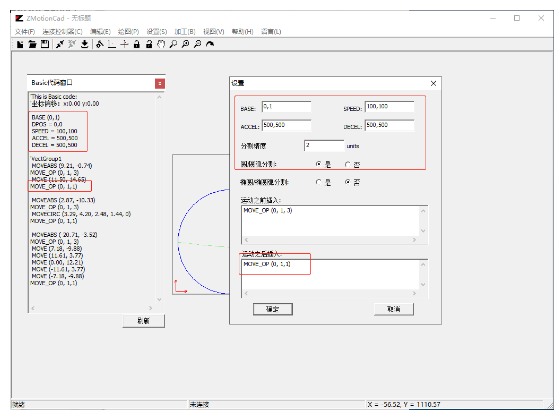
“運動之前插入”表示運動完一段,實軸之前需要插入的內容,默認為MOVE_OP(0,1, 3),“運動之后插入”表示運動完一段,實軸之后需要插入的內容(即下一段圖形為空走或已結束),默認為MOVE_OP(0,1,0)。設置前如上圖所示;設置后如下圖所示。
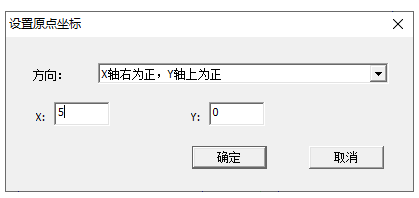
(二)原點設置
原點即為加工的起始點,原點位置可自定義設置,生成的Basic代碼及Bin數據會根據原點的變化而改變。
在菜單欄“設置”打開“設置原點坐標”窗口,原點默認XY的坐標均為0,先選擇XY軸的正方向,再設置原點偏移量,設置完成后續所有指令參數絕對位置發生變化。
初始狀態原點為(0,0):
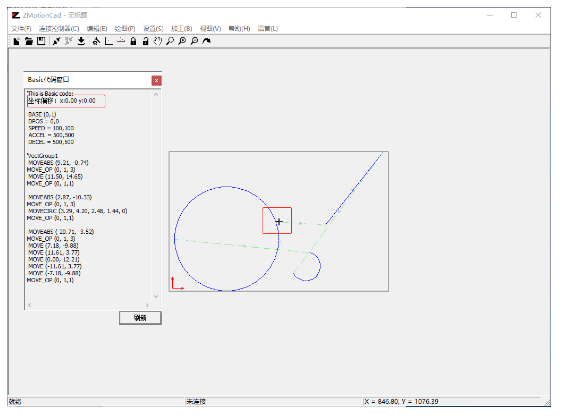
原點由(0,0)偏移為(5,0)后:
(三)自定義運動軌跡
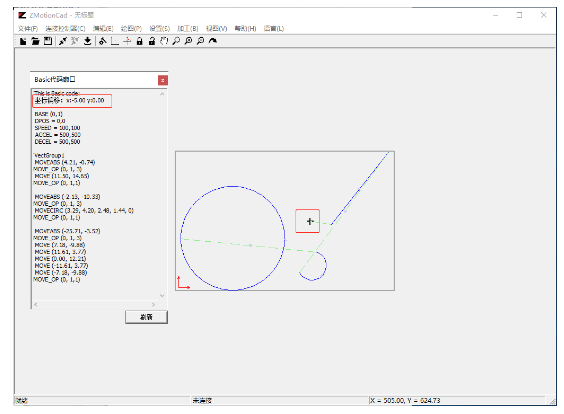
用戶導入dxf文件后,系統會把圖形根據算法自動排序加工順序,若用戶不滿意,可以手動修改圖形的順序。
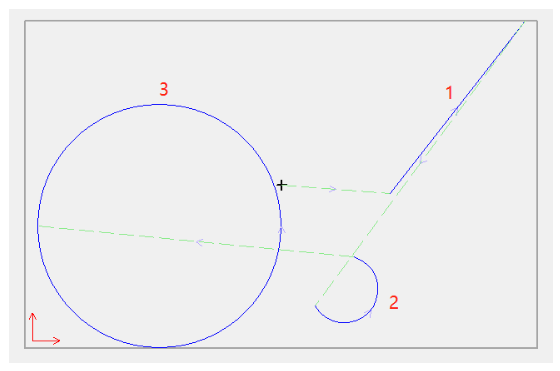
在菜單欄繪圖打開“自定義運動軌跡”窗口,按照加工順序自動編號,初始默認直線對應編號1,小圓對應編號2,大圓對應編號3,通過改變編號順序自定義加工順序。
若當前圖層數據不是dxf文件的圖形數據,則不支持排序,排序窗口中的編號變為空。
自定義軌跡調整方法:單擊改變前編輯框的編號,對應的線段會變紅色,雙擊改變前編輯框中的編號,表示要改變此段圖形的順序,則此標號會移動到改變后編輯框,“>>”按鈕表示所有的圖形都重新編輯順序,在改變后編輯框中,可以選擇某一段圖形進行上移、下移、置頂、置底操作,也可以點擊“反序”按鈕來顛倒改變后編輯框中圖形的順序,點擊重置按鈕可以重新編輯圖形的運動順序,編輯完成后點擊確定按鈕,系統會根據改變后編輯框從上到下、改變前編輯框上到下的順序重新排序。
初始軌跡加工順序:按如下箭頭所示123順序加工。
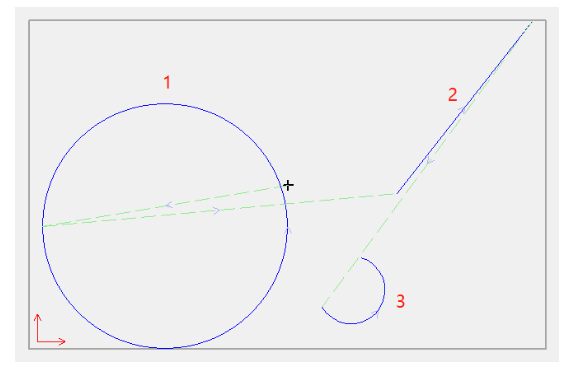
調整為312后的軌跡加工順序:
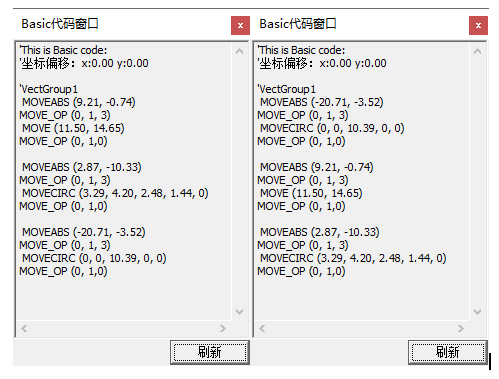
改變前后的basic代碼:
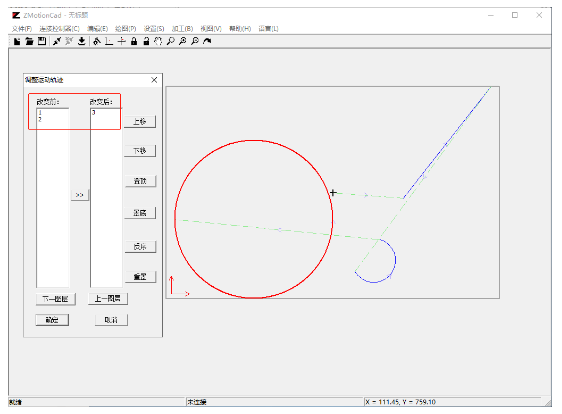
五、生成數據
導圖軟件在導入圖形或打開zmo文件后,會自動根據文件的數據及用戶的設置生成一些運動控制器需要的加工數據,可在“視圖”的如下三個窗口中查看生成的數據。
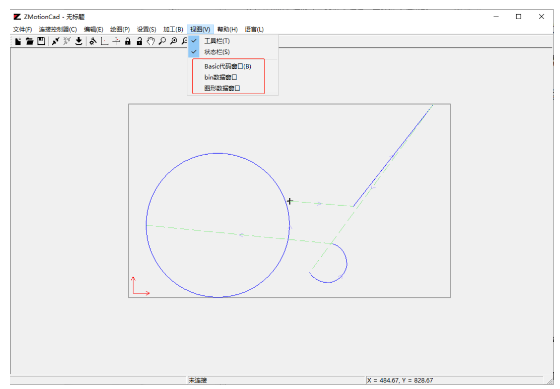
如下依此為上圖生成的數據Basic代碼窗口、bin數據窗口、圖形數據窗口。保存數據以如下三種形式保存。
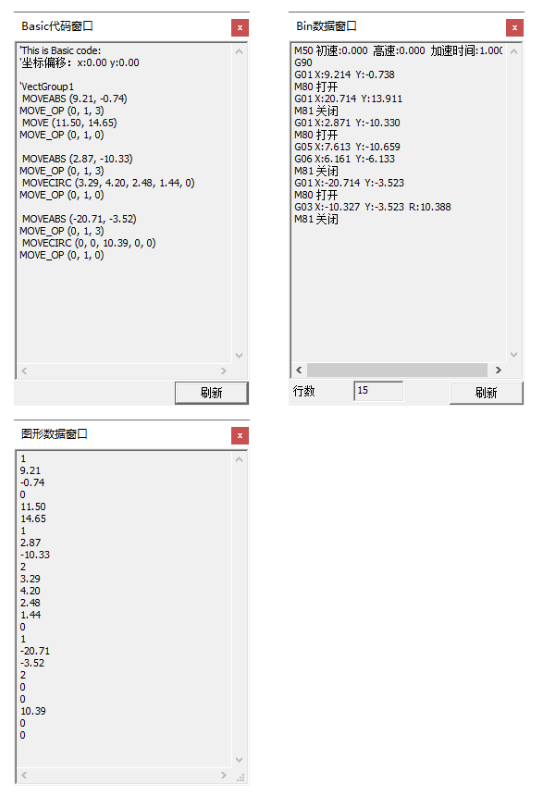
Bin數據窗口以G代碼的形式表示,下載到控制器使用時,需要使用GSUB指令自定義G代碼子函數,在GSUB內使用basic指令自定義G代碼的功能,通過G代碼調用GSUB執行。
語法:
GSUB label([char1] [,char2]…)
…
END SUB
例子:
RAPIDSTOP(2)
WAIT IDLE
GLOBAL coor_rel
coor_rel = 1 '1-相對位置模式,0-絕對位置模式
BASE(0,1,2,3) '選擇 X Y Z U,G01里面有指定,不能隨意修改
DPOS = 0,0,0,0
ATYPE=1,1,1,1 '脈沖方式步進或伺服
UNITS = 100,100,100,100 '脈沖當量,每MM100脈沖
SPEED = 200,200,200,200
ACCEL = 2000,2000,2000,2000
DECEL = 2000,2000,2000,2000
MERGE = ON '啟動連續插補
CORNER_MODE = 2 '啟動拐角減速
DECEL_ANGLE = 15 * (PI/180)
STOP_ANGLE = 45 * (PI/180)
TRIGGER
G91 '相對位置,調用GSUB
G01 X100 Y0 '運動軌跡
G01 X0 Y100
END
'自定義G代碼
GLOBAL GSUB G90() '絕對位置模式
TRACE "G90 entered"
coor_rel = 0
END SUB
GLOBAL GSUB G91() '相對位置模式
TRACE "G91 entered"
coor_rel = 1
END SUB
GLOBAL GSUB G01(X Y Z U) 'G01直線插補
TRACE "G01 entered, distance:" sub_para(0),sub_para(1),sub_para(2),sub_para(3)'調試輸出
IF coor_rel THEN
MOVE(sub_para(0),sub_para(1),sub_para(2),sub_para(3)) '相對位置
ELSE
LOCAL xdis, ydis, zdis, udis
IF sub_ifpara(0) THEN '判斷是否有參數傳入SUB
xdis = sub_para(0)
ELSE
xdis = dpos(0)
ENDIF
IF sub_ifpara(1) THEN
ydis = sub_para(1)
ELSE
ydis = dpos(1)
ENDIF
IF sub_ifpara(2) then
zdis = sub_para(2)
ELSE
zdis = dpos(2)
ENDIF
IF sub_ifpara(3) then
udis = sub_para(3)
ELSE
udis = dpos(3)
ENDIF
MOVEABS(xdis,ydis,zdis,udis) '絕對位置
ENDIF
END SUB
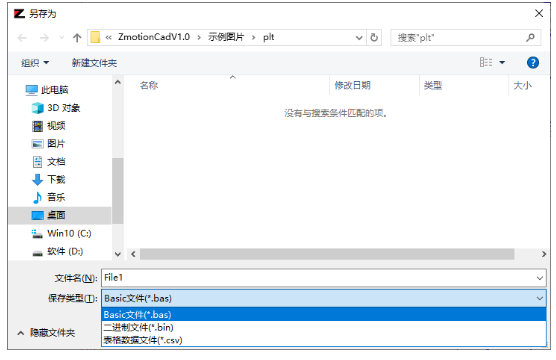
六、保存數據
生成的數據可導出保存,可導出三種類型的數據,分別為Basic文件、二進制文件和表格數據文件。
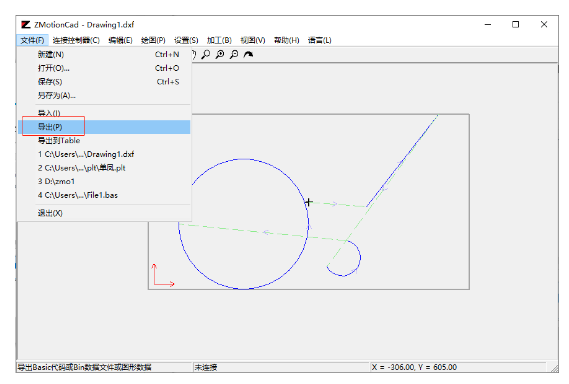
Basic文件、二進制文件、表格數據文件分別對應“視圖”窗口的Basic代碼窗口、bin數據窗口、圖形數據窗口。
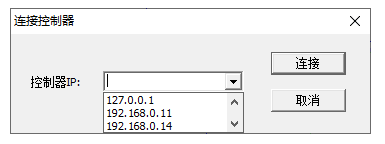
七、連接控制器
“連接”打開“連接到控制器”窗口,自動獲取可用控制器IP,在下拉列表選擇IP后連接即可。
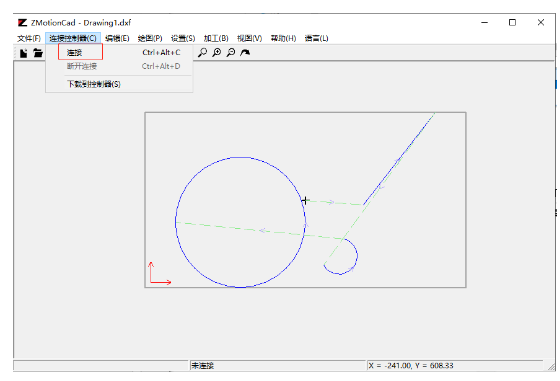
沒有控制器連接到仿真器使用,先打開ZDevelop根目錄的仿真器,在下方窗口選擇IP地址127.0.0.1連接。
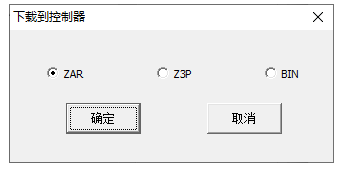
八、發送數據
需要連接到控制器或仿真器之后才能發送數據,打開“下載到控制器”窗口,可以選擇zar或z3p或bin方式發送到控制器。
1.zar方式下載到控制器:需要先保存Basic文件到本地磁盤中(在同一目錄下自動生成zar文件),然后系統自動下載到控制器并立即運行。
選擇zar下載方式后,自動彈出Basic代碼窗口,將此段代碼以zar的形式下載到控制器。
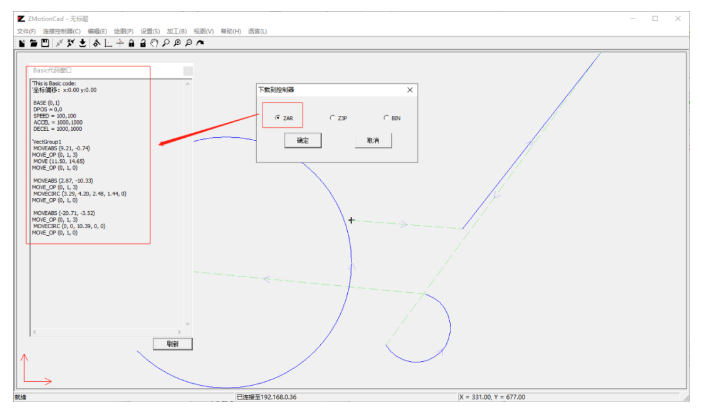
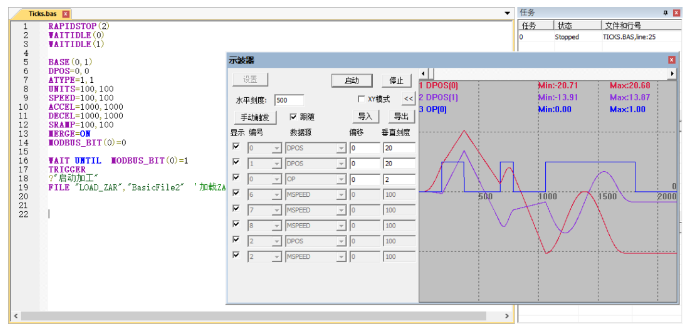
確認后彈出“另存為”窗口,輸入要保存的zar文件名稱“BasicFile2.zar”,保存完成彈出如下提示窗口,zar文件自動下載到控制器運行。

以zar方式下載到控制器運行的效果如下圖,啟動示波器采樣運動軌跡。下載前設置好軸參數,zar文件看不到代碼。
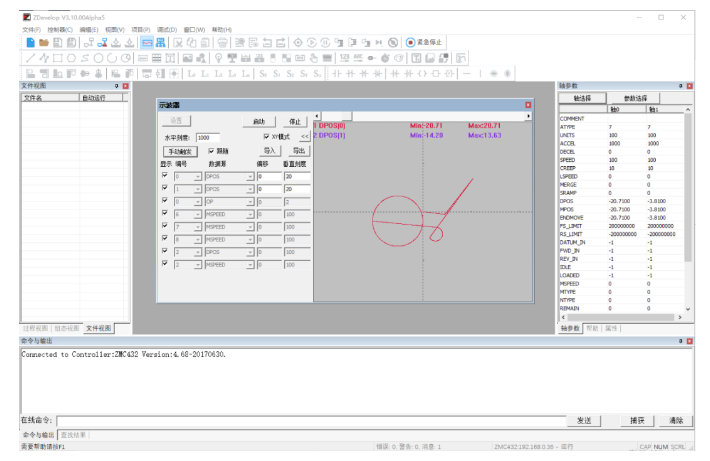
將basic窗口代碼復制到ZDevelop軟件內,下載到控制器運行與上方zar文件效果一樣。
導圖軟件發送給控制器的數據只包含基本軸參數與運動軌跡,在ZDevelop軟件編輯好其他程序后,運行file指令加載zar文件,就能開始加工。
調用語法:FILE "LOAD_ZAR","BasicFile2" '從U盤中下載zar文件到控制器。
調用的zar文件代碼如下:
'This is Basic code:
'坐標偏移:x:0.00 y:0.00
BASE (0,1)
DPOS = 0,0
SPEED = 100,100
ACCEL = 1000,1000
DECEL = 1000,1000
'VectGroup1
MOVEABS (9.21, -0.74)
MOVE_OP (0, 1, 3)
MOVE (11.50, 14.65)
MOVE_OP (0, 1, 0)
MOVEABS (2.87, -10.33)
MOVE_OP (0, 1, 3)
MOVECIRC (3.29, 4.20, 2.48, 1.44, 0)
MOVE_OP (0, 1, 0)
MOVEABS (-20.71, -3.52)
MOVE_OP (0, 1, 3)
MOVECIRC (0, 0, 10.39, 0, 0)
MOVE_OP (0, 1, 0)
2.z3p方式下載到控制器,則需要先保存z3p文件到本地磁盤中,然后需要輸入程序在控制器中的名稱,默認為保存的文件名為"z3pFile5.z3p",再通過指令或三次文件工具加載z3p文件到控制器運行。
將z3p文件保存在U盤中,使用FILE3_RUN指令以任務在程序中調用z3p文件運行。
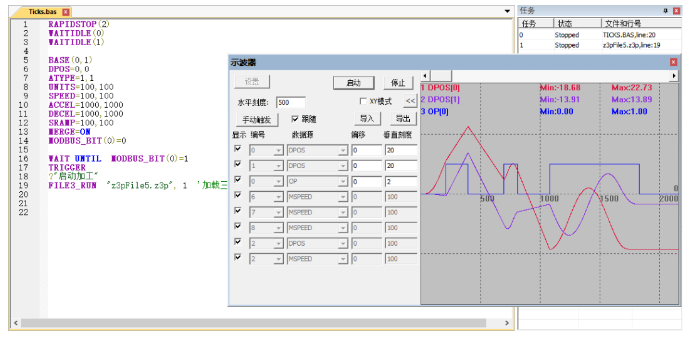
調用語法:FILE3_RUN "z3pFile5.z3p", 1 '以任務號1加載三次文件運行
3.bin方式下載到控制器,輸入bin數據需要發送到的Flash塊號,然后系統自動根據輸入Flash的塊號發送bin數據到控制器的Flash。
注意:如果當前沒有控制器連接,或此時正在模擬加工,則無法發送到控制器中。
也可以在“Basic代碼窗口”復制代碼后下載到控制器運行,這種方式的好處是程序在ZDevelop軟件可見,方便編輯調整。
03 軟件其他功能
一、模擬加工
模擬程序下載到控制器之后的運行效果,即用可見的速度模擬路徑生成的過程,用紅色線條加工,在加工過程中,會鎖定圖像并且不能進行導入、導出等操作,也不支持改變窗口的大小位置。
在加工過程中,按Esc鍵、解鎖按鈕或重畫按鈕可退出模擬加工。
二、導入多個文件
軟件每次導入操作僅支持一個文件導入,若要導入多個文件,可以分多次導入操作進行導入,生成的圖形默認會以疊加的方式顯示,加工時按順序依次加工完所有圖層的數據。如下圖,導入了兩個圖層,默認顯示全部圖層。
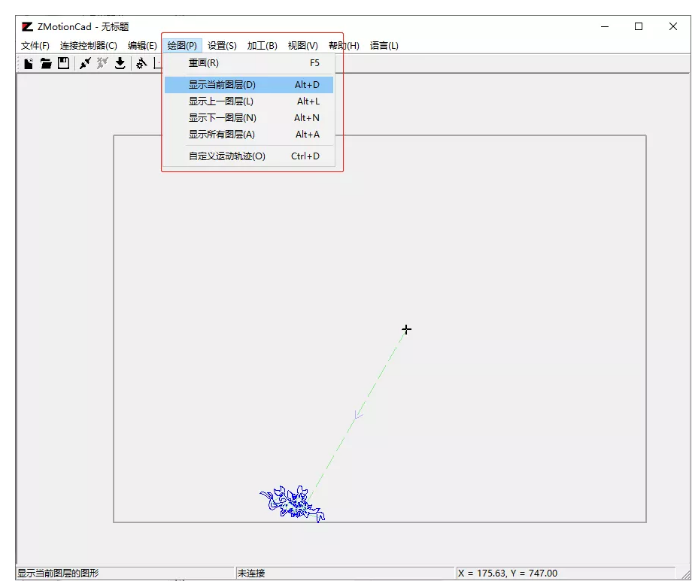
多個不同圖層之前的切換和顯示,通過“繪圖”切換,下圖為選擇“顯示當前圖層”,此時只顯示出一個圖層。
點擊下一圖層表示切換到下一個圖層進行編輯,點擊上一圖層表示切換到上一個圖層進行編輯。
《正運動技術CAD導圖軟件配合控制器的使用方法》就講到這里。更多學習視頻及圖文詳解請關注我們的公眾號“正運動小助手”。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
-
運動控制器
+關注
關注
2文章
394瀏覽量
24663 -
運動控制
+關注
關注
4文章
567瀏覽量
32828 -
激光切割
+關注
關注
2文章
219瀏覽量
12863 -
正運動技術
+關注
關注
0文章
97瀏覽量
334
發布評論請先 登錄
相關推薦

















 工商網監
工商網監
評論