 案例分享!IMX8 Cortex-A53與Cortex-M4多核通信開發詳解
案例分享!IMX8 Cortex-A53與Cortex-M4多核通信開發詳解
前言:本文主要演示i.MX 8M Mini基于OpenAMP的Cortex-A53和Cortex-M4核心的核間通信,其中Cortex-A53運行Linux系統,Cortex-M4運行FreeRTOS系統。

圖 1
案例測試硬件平臺:TLIMX8-EVM評估板(NXP i.MX 8M Mini)

圖 2 TLIMX8-EVM評估板
案例詳細說明、源碼請掃描下方二維碼或點擊下載鏈接:
http://site.tronlong.com/pfdownload
1.1 案例功能
(1) Cortex-A53釋放Cortex-M4,然后初始化RPMsg,并創建端點。
(2) Cortex-A53啟動Linux系統,執行握手服務,創建通信信道,并發送一條信息至Cortex-M4。
(3) Cortex-M4接收到第一條信息時,計數器自加1,然后回發計數器值至Cortex-A53。
(4) Cortex-A53接收Cortex-M4發送的計數器數值,計數器自加1,然后回發計數器數值至Cortex-M4。
(5) 當計數器數值大于100時,通信結束。
1.2 案例測試
案例bin目錄下分別提供了TCM版本程序鏡像文件rpmsg_lite_pingpong_rtos_linux_remote.bin和DDR版本程序鏡像文件rpmsg_lite_pingpong_rtos_linux_remote_ddr.bin。
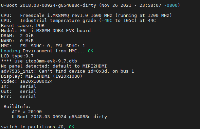
在U-Boot命令行加載運行Cortex-M4程序鏡像文件后,RS232 UART4調試串口打印如下信息。

圖 3
運行boot命令,在Cortex-A53啟動運行Linux系統。
U-Boot=> boot

圖 4
進入評估板文件系統后,執行如下命令加載imx_rpmsg_pingpong模塊,啟動核間通信。
Target# modprobe imx_rpmsg_pingpong

圖 5
加載模塊后,Cortex-M4將接收Cortex-A53發送的數據,并將其轉發回Cortex-A53,循環50次后結束。RS232 UART4調試串口打印信息如下。

圖 6

圖 7
1.3 關鍵代碼
Linux驅動程序
驅動的實現在imx_rpmsg_pingpong.c中完成,此文件位于內核"drivers/rpmsg/"路徑下。
(1) Linux系統加載驅動后,先發送一條helloMsg,然后發送第一條乒乓信息。

圖 8
(2) 在回調函數中,每次接收到Cortex-M4的計數器數據后自加1,并回發至Cortex-M4,直到計數器數值大于100。

圖 9
FreeRTOS程序
程序主體位于main函數中,定義位于main_remote.c中。
(1) 在main函數中首先初始化引腳等相關資源,然后創建app_task任務,并啟動任務列表。

圖 10
(2) 在app_task任務中定義共享內存基地址,需和設備樹中指定地址一致,再初始化RPMsg資源,并等待連接上遠程終端。

圖 11
(3) 接收helloMsg,并循環收發乒乓信息。

圖 12
(4) 信息以乒乓形式結束后注銷RPMsg相關資源,并進入死循環。

圖 13
2 rpmsg_lite_str_echo_rtos案例
2.1 案例功能
(1) Cortex-A53釋放Cortex-M4,然后初始化RPMsg,并創建端點。
(2) Cortex-A53啟動Linux,執行握手服務,并創建通信信道。
(3) Linux驅動生成"/dev/ttyRPMSG30"節點,將用戶輸入至該節點的數據發送至Cortex-M4。
(4) Cortex-M4接收數據并進行打印,再將數據回發至Cortex-A53。
(5) Cortex-A53(Linux驅動)接收數據并進行打印。
2.2 案例測試
案例bin目錄下分別提供了TCM版本程序鏡像文件rpmsg_lite_str_echo_rtos.bin和DDR版本程序鏡像文件rpmsg_lite_str_echo_rtos_ddr.bin。
在U-Boot命令行加載運行Cortex-M4程序鏡像文件后,RS232 UART4調試串口打印如下信息。

圖 14
運行boot命令,在Cortex-A53啟動運行Linux系統。
U-Boot=> boot

圖 15
進入評估板文件系統后,執行如下命令加載imx_rpmsg_tty模塊,啟動核間通信。
Target# modprobe imx_rpmsg_tty

圖 16
Linux系統加載模塊后,會發送數據"hello world"至Cortex-M4。Cortex-M4接收到數據后,在RS232 UART4調試串口將數據進行打印。

圖 17
在USB TO UART2調試串口執行如下命令,將接收到的數據發送至Cortex-M4。
Target# echo tronlong > /dev/ttyRPMSG30

圖 18
Cortex-M4接收到數據后,在RS232 UART4調試串口將數據進行打印,同時將數據回發至Cortex-A53。

圖 19
在USB TO UART調試串口執行如下命令,可查看Cortex-M4回發的數據。
Target# dmesg | grep rpmsg_tty

圖 20
2.3 關鍵代碼
Linux驅動程序
驅動的實現在imx_rpmsg_tty.c中完成,此文件位于內核"drivers/rpmsg/"路徑下。
(1) imx_rpmsg_tty.c的寫函數實現數據的發送,發送緩存最大設置為256Byte。

圖 21
(2) 在回調函數中,每次接收到Cortex-M4的數據后,都以16進制的方式進行打印,打印等級為KERM_DEBUG。

圖 22
FreeRTOS程序
程序主體位于main函數中,定義位于main_remote.c中。
(1) 在main函數中初始化引腳等相關資源,然后創建app_task任務,并啟動任務列表。

圖 23
(2) 在app_task任務中定義共享內存基地址,需和設備樹中指定地址一致,再初始化RPMsg資源,并創建通信終端。

圖 24
(3) 在for循環中實現數據收發。

圖 25
-
ARM處理器
+關注
關注
6文章
360瀏覽量
41513 -
嵌入式主板
+關注
關注
7文章
6081瀏覽量
34931 -
Cortex-M4
+關注
關注
6文章
89瀏覽量
46442 -
Cortex-A53
+關注
關注
0文章
33瀏覽量
21241 -
imx8
+關注
關注
3文章
41瀏覽量
50110
發布評論請先 登錄
相關推薦
【北京迅為】《i.MX8MM嵌入式Linux開發指南》-第四篇 嵌入式Linux系統移植篇-第六十七章 Uboot編譯及移植
ARM Cortex-A53嵌入式開發平臺FETT507-C OKT507-C用戶編譯手冊
ARM Cortex-A53嵌入式開發平臺Android手冊
Imagination新推APXM-6200 CPU,性能超越Cortex-A53
Cortex-A72應用實戰
標準系統:OSWare 大牛-8M Mini
MAX32570: Low-Power Arm Cortex-M4 Microcontroller with Contactless Radio for Secure Applications Data Sheet MAX32570: Low-Power Arm Cortex-M

MAX32655: Low-Power, Arm Cortex-M4 Processor with FPU-Based Microcontroller and Bluetooth 5.2 Data Sheet MAX32655: Low-Power, Arm Cortex-M4
MAX32690:裝有FPU微控制器的裝甲Cortex-M4和用于工業和服裝數據表的藍牙LE 5 ADI
敏矽微電子Cortex-M0學習筆記02——Cortex-M0開發環境的建立及調試

從SAM C2x/D2x/L2x Cortex-M0+器件遷移到SAM D5x/E5x Cortex-M4 器件






 工商網監
工商網監
評論