 精密工具機配件
精密工具機配件
隨著工業自動化的開展,近幾年在數控機床配件、CNC機械配件、精密工具機配件、工廠流水線的供需增加,導致了傳動配件出現供不應求的狀態,因此越來越多的人投身在精密行業中了,無論是銷售人員還是公司老板,都是需要儲備一定的知識量的,因此,市面上涌現了一大批割韭菜的課程,雖然不貴,但是也學不到東西呀!這就讓人很捉急了!為了不讓大家被割韭菜割的太狠,小編特地整理出一些連師父都沒告訴你的結構設計精髓哦!趕緊往下看!
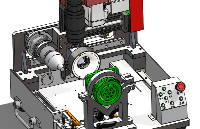
今天以移栽機械手為例哦!移栽機械手采取的移栽型式是,底部的X軸采取同步帶模組進行傳動,傳動同時在底座進行左右方式移動,與此同時在我們的Z軸包括Y軸方向其實都沒有任何的負載的。
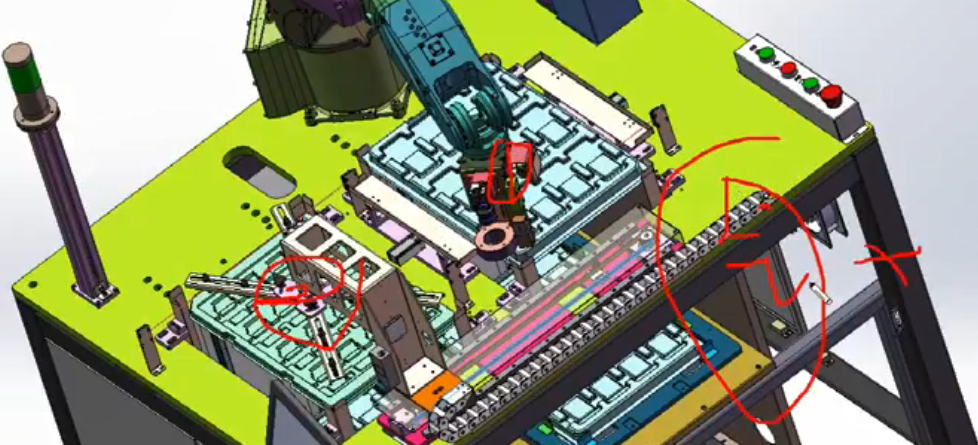
這個Z軸方向采取的是通過氣缸控制整個結構上下移動 這個結構我們可以把他看作是兩軸接手,這種接手非常簡單,兩個軸方向做動力就可以了,做過這種機械手的應該都知道,機械手本身考慮到的就是需要做幾個軸方向的動力,然后在那幾個方向的軸方向去做模組。
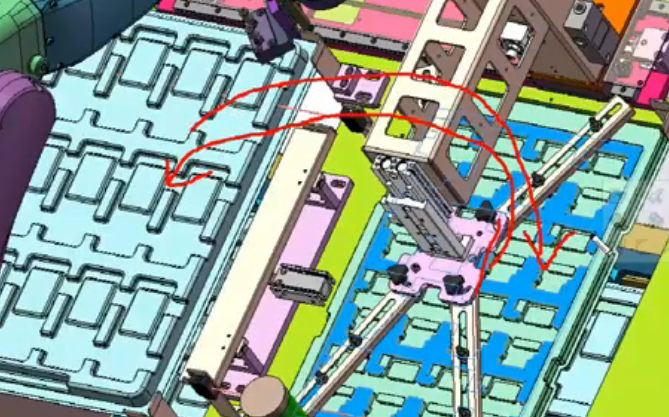
這時候,問題來了,X軸方向需要分別移動到哪里去呢?原來是把一個托盤移栽放到另一個托盤中,移栽結構需要兩個料盤來回切換。
兩個位置的停止我們可以想到一個問題,我做X軸方向時能不能采取便宜的氣缸模組進行使用呢?實現這個功能的模組就有很多個,有比較便宜的模組,比如無桿氣缸,帶導桿的氣缸,價格可能就是一個電機價格,也有貴一點的模組,比如絲杠模組。
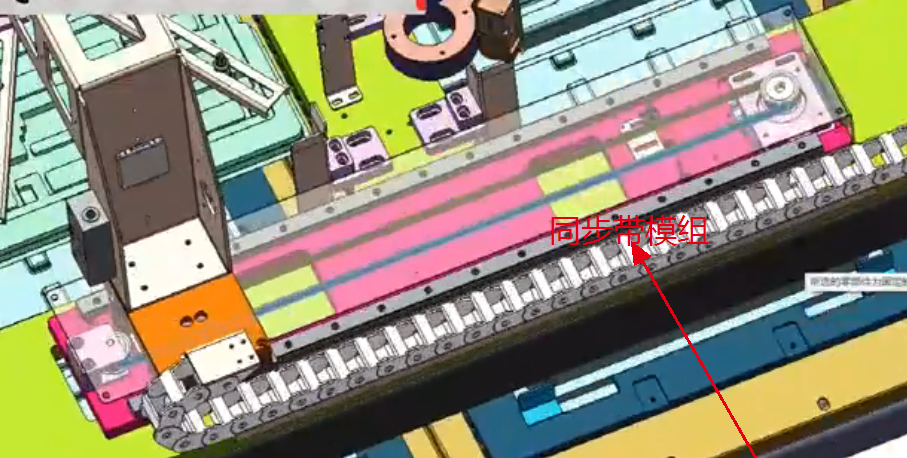
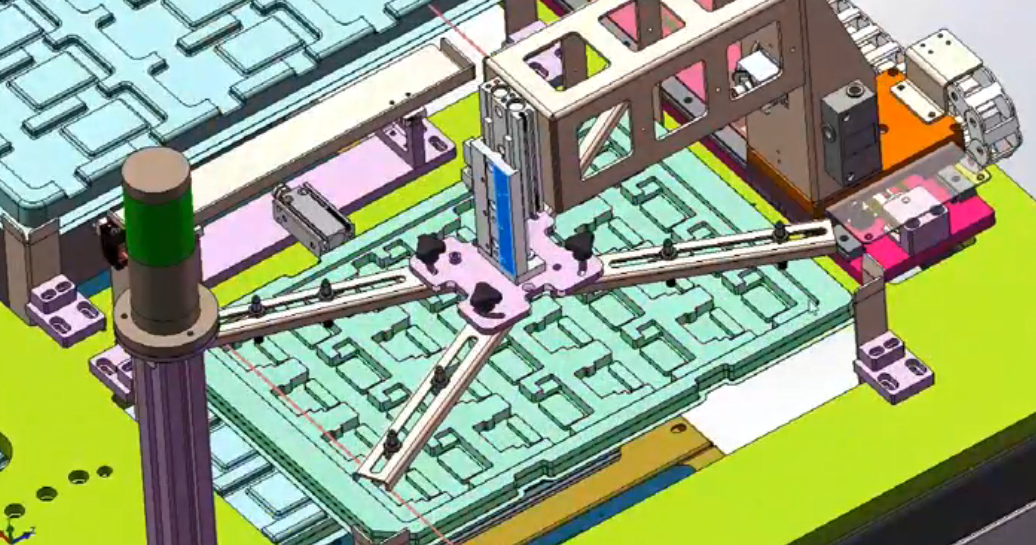
這個結構上可以看出,使用的是同步帶外配電機,如果在功能能實現的情況下,我們可以盡可能的選擇一個便宜一點的結構。
其實我們要考慮到的并不是只有這一點關系,兩點位置的停止,我們不能把一點位置的停駐當做氣缸來用,因為這個結構不能判斷X軸就可以采用一個氣缸的,我們還要分析第一點和第二點的精度問題,精度相對較高,那么這個結構的氣缸就不能實現這個功能了,因為氣缸的精度低,但是在這個結構中,我們要移栽放入到第一個料盤當中,在移栽過程中的精度要有一定的保證的。
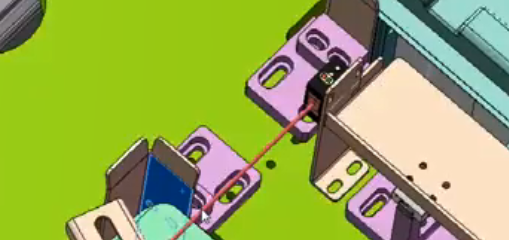
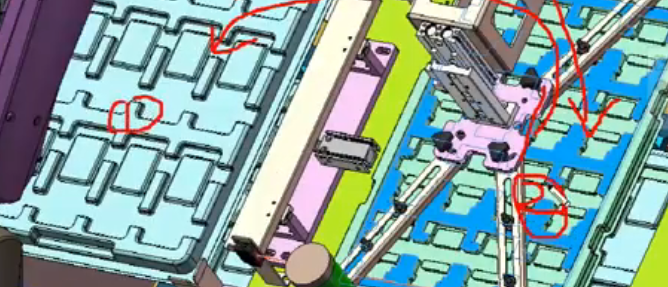
從這個結構可以看出,每一料盤旁邊都會有一個導向塊的板筋,兩個板筋定位時,我們要知道兩個板筋之間的間距與料盤之間的間距最大誤差是多少,比如說左右X軸移動的誤差是多少,我們才可以考慮結構中要用什么模組。
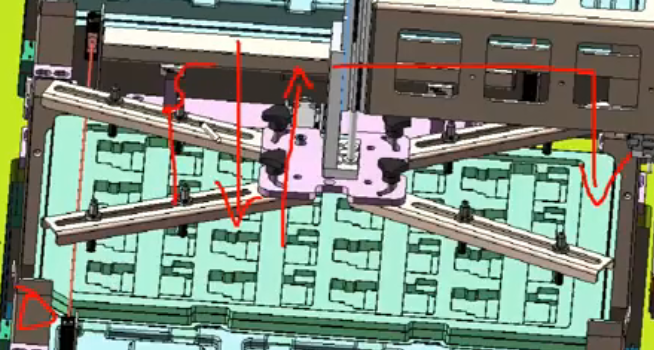
Z軸方向是一個簡單的滑輪氣缸,Z軸方向移栽的同時都會完成下去上去再過去的這個過程,防止旁邊一些擋塊,做到一個空間干涉的作用,那么在這個地方是需要做升降的工作(2個3個都可以),所以我們的Z軸方向可以隨便選擇,但是需要注意的一點是搭配帶動包括吸附或者說夾取起來的這個負載,需要得到穩定性的保障,夾持力和吸附力一定要足夠,換一個說法就是推力也需要保證。
好了,本期干貨滿滿,小編簡直把藏在心窩子里的東西都掏出來了,你們再學不會,就點個小心心收藏一下,多看幾遍哦!
發布評論請先 登錄
相關推薦
機房精密空調外機的技術細節!
精密空調外機故障?別怕,這里有妙招!















 工商網監
工商網監
評論