 啟明云端分享|ESP32-C3 IO口控制燈的應用及串口通信示例
啟明云端分享|ESP32-C3 IO口控制燈的應用及串口通信示例

啟明云端作為樂鑫代理,一直都盡最大可能做完善的教程能幫助更多的開發小伙伴快速上手各種應用;今天小明為大家帶來ESP32-C3通過IO口控制燈及串口通信演示;每一個步驟我們都分享出來供小伙伴們參考!
1.指定芯片
編譯前應注意應先設置目標芯片 設置指令 :

idf.pyset-targetesp32c3
注意,此操作將清除并初始化項目之前的編譯和配置(如有)
否則將報錯 如下 :

默認配置為ESP32如果使用的是ESP32的話則不需要這句
idf.pyset-targetesp32c3
2.燒入已經生成的文件

編譯, idf.py -p COM5 flash 燒入
3.硬件連接

注意:接線 : 18腳接rgb燈的 G段顯綠色 19接rgb燈的B段;顯示為青色, 這里的18可以和19調換, 因為點亮的時間與強度一致
4.GPIO初始化
接著最簡單也是最重要的IO初始化及輸出
gpio_config_tio_conf; //創建io配置結構體
io_conf.intr_type=GPIO_INTR_DISABLE; //禁用中斷
io_conf.mode=GPIO_MODE_OUTPUT; //設置為輸出模式
io_conf.pin_bit_mask=GPIO_OUTPUT_PIN_SEL;
//io腳位掩碼,用位運算左移到需要改變的位進行操作
//#defineGPIO_OUTPUT_PIN_SEL ((1ULL/(1ULL/該宏便是先將1強轉類型為無符號長整型左移再或運算使得18,19一起配置為輸出
io_conf.pull_down_en=0; //下拉模式使能關閉
io_conf.pull_up_en=0; //上拉模式使能打開
gpio_config(&io_conf); //gpio配置
5.輸出控制
輸出已經配置好了
gpio_set_level(GPIO_OUTPUT_IO_0,0); //18腳設置為低電平
gpio_set_level(GPIO_OUTPUT_IO_1,1); //19腳設置為高電平
6.接收初始化
這個時候輸出已經好了,接著便是接收
//interruptofrisingedge
io_conf.intr_type=GPIO_INTR_POSEDGE; //設置上升沿中斷
//bitmaskofthepins,useGPIO4/5here
io_conf.pin_bit_mask=GPIO_INPUT_PIN_SEL; //io腳位掩碼,用位運算左移到需要改變的位進行操作
//setasinputmode
io_conf.mode=GPIO_MODE_INPUT;//設置為輸入模式
//enablepull-upmode
io_conf.pull_up_en=1;//上拉模式使能打開
gpio_config(&io_conf);
接收有中斷接收和讀取IO電壓接收
中斷接收優點 : 相對于實時讀取
讀取IO優點 : 簡單易操作
7.獲取輸入電平
讀取IO :
Int IO0_level = gpio_get_level(GPIO_INPUT_IO_0); /*返回值為讀取的IO_0的高低電平*/
中斷加線程 :
//changegpiointrrupttypeforonepin
gpio_set_intr_type(GPIO_INPUT_IO_0,GPIO_INTR_ANYEDGE);
//改變一個pin的中斷類型
//createaqueuetohandlegpioeventfromisr
gpio_evt_queue=xQueueCreate(10,sizeof(uint32_t)); //創建一個新的隊列
//startgpiotask
xTaskCreate(gpio_task_example,"gpio_task_example",2048,NULL,10,NULL); //開線程跑函數gpio_task_example
//installgpioisrservice
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT); //為相應的GPIO引腳添加ISR處理程序
//hookisrhandlerforspecificgpiopin
gpio_isr_handler_add(GPIO_INPUT_IO_0,gpio_isr_handler,(void*)GPIO_INPUT_IO_0); //為相應GPIO添加ISR處理程序
//hookisrhandlerforspecificgpiopin
gpio_isr_handler_add(GPIO_INPUT_IO_1,gpio_isr_handler,(void*)GPIO_INPUT_IO_1); //為相應GPIO添加ISR處理程序
//removeisrhandlerforgpionumber.
gpio_isr_handler_remove(GPIO_INPUT_IO_0); //刪除相應的ISR程序這里測試對應函數功能
//hookisrhandlerforspecificgpiopinagain
gpio_isr_handler_add(GPIO_INPUT_IO_0,gpio_isr_handler,(void*)GPIO_INPUT_IO_0); //再次添加
staticvoidIRAM_ATTRgpio_isr_handler(void*arg)
{
uint32_tgpio_num=(uint32_t)arg;
xQueueSendFromISR(gpio_evt_queue,&gpio_num,NULL);
}
staticvoidgpio_task_example(void*arg)
{
uint32_tio_num;
for(;;)
{
if(xQueueReceive(gpio_evt_queue,&io_num,portMAX_DELAY))
{
printf("GPIO[%d]intr,val:%d\n",io_num,gpio_get_level(io_num));
}
}
}
具體的demo在已下載好的 esp-idf\examples\peripherals\gpio\gpio\generic_gpio
1.再次提醒
編譯前應注意應先設置目標芯片 設置指令 :
idf.pyset-targetesp32c3
注意,此操作將清除并初始化項目之前的編譯和配置(如有)
否則將報錯 如下 :
默認配置為ESP32如果使用的是ESP32的話則不需要這句
idf.pyset-targetesp32c3
這里可以看見TX 發送數據口 4
RX 接收數據 5
2.查看端口號
連接設備 :
Windows 環境 打開設備管理器 找到
按下windows按鍵/鼠標單擊左小角

鍵盤輸入設備管理器

找到 COM和LPT選項

當COM口未連接設備不會有該選項
3.軟件講解
idf.py-p(PORT)monitor
這個PORT即端口號, 如上則是COM3 命令 : idf.py -p COM3 monitor
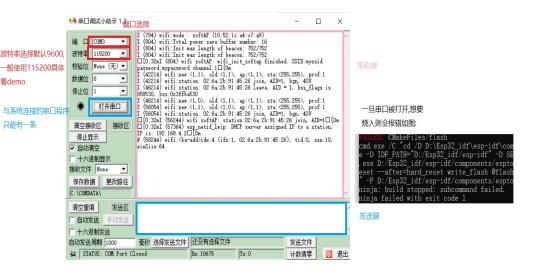
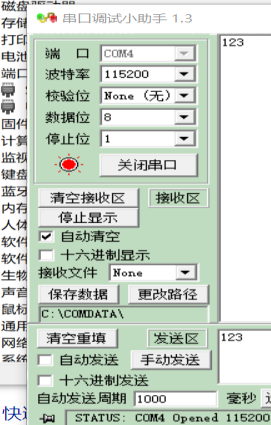
也可以使用簡單的串口調試工具
鏈接:https://pan.baidu.com/s/1zD5JzLBzn72FNymSp4gSAw
提取碼:1234
也可以運行以下命令,一次性執行構建、燒錄和監視過程:
idf.py-pPORTflashmonitor
4.硬件連接
設備連接方式 : 需要用到一個TTL轉 USB 模塊
比如此轉換是TTL轉TYPE-C母 在接跟TYPE-C公轉USB公接入電腦
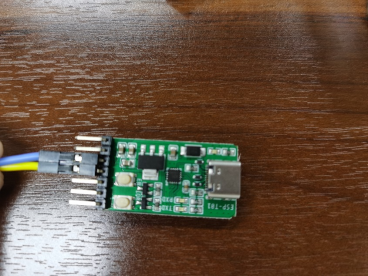 ESP32-T01
ESP32-T01即將發送數據的TX ( 4腳) 連接到轉換模塊的 RX
接收數據的RX( 5腳) 連接到轉換模塊的TX ( 發送端)
實現原理 :
假設ESP32-C3的printf 的串口為UART_1
ESP32-C3新配置的串口為 UART_2
5.功能實現
電腦通過串口UART_2發送數據到ESP32-C3
ESP32-C3 使用printf 函數 通過UART1打印給電腦 printf (“%s\n”, data);
并且通過串口打印到電腦的串口,即可在串口調試小助手上接收
uart_write_bytes(ECHO_UART_PORT_NUM,(constchar*)data,len);
6.Printf 函數測試
第一個demo “hello_word”
即使用printf 函數 向與電腦連接的串口發送數據
好處 : 方便快捷
考慮到線程安全,在FREERTOS中盡量使用ESP_LOGX來輸出調試信息和打印消息
/*Printchipinformation*/
esp_chip_info_tchip_info; //芯片信息結構體
esp_chip_info(&chip_info); //獲取芯片信息函數,只需將結構體地址傳入
printf("Thisis%schipwith%dCPUcore(s),WiFi%s%s,",
CONFIG_IDF_TARGET,
chip_info.cores, /*芯片名稱*/
(chip_info.features&CHIP_FEATURE_BT)?"/BT":"",
(chip_info.features&CHIP_FEATURE_BLE)?"/BLE":"");
7.兩個串口數據收發代碼講解
接著
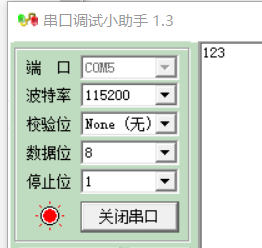
uart_config_tuart_config=
{
.baud_rate=ECHO_UART_BAUD_RATE, /*串口波特率*/
.data_bits=UART_DATA_8_BITS, /*串口八位數據*/
.parity =UART_PARITY_DISABLE, /*禁用串口奇偶校驗*/
.stop_bits=UART_STOP_BITS_1, /*串口停止位1*/
.flow_ctrl=UART_HW_FLOWCTRL_DISABLE, /*串口數據流控制禁用*/
.source_clk=UART_SCLK_APB, /*時鐘源選擇來自于APB的時鐘*/
}; //串口配置結構體
intintr_alloc_flags=0;
配置第二個串口嘗試使用兩個串口環路數據測試
下面串口demo路徑為 : esp-idf\examples\peripherals\uart\uart_echo
//串口驅動下載函數(TX環形緩沖區,RX環形緩沖區,事件隊列句柄和大小,分配中斷的標志)
ESP_ERROR_CHECK(uart_driver_install(ECHO_UART_PORT_NUM,BUF_SIZE*2,0,0,NULL,intr_alloc_flags));
//串口配置函數( 串口號,串口配置結構體)
ESP_ERROR_CHECK(uart_param_config(ECHO_UART_PORT_NUM,&uart_config));
//設置通信IO函數(波特率,TXIO,RXIO,RTSIO,CTSIO)
ESP_ERROR_CHECK(uart_set_pin(ECHO_UART_PORT_NUM,ECHO_TEST_TXD,ECHO_TEST_RXD,ECHO_TEST_RTS,ECHO_TEST_CTS));
//Configureatemporarybufferfortheincomingdata
uint8_t*data=(uint8_t*)malloc(BUF_SIZE); //創建一個大小為BUF_SIZE的指針
while(1)
{
bzero(data,BUF_SIZE); //清空指針內殘留
// ReaddatafromtheUART 從串口讀取數據
intlen=uart_read_bytes(ECHO_UART_PORT_NUM,data,BUF_SIZE,20/portTICK_RATE_MS);
//if(*data!=0) //如果不是默認值則認為該數據為正確值
{
printf("%s\n",data);
}
//WritedatabacktotheUART
uart_write_bytes(ECHO_UART_PORT_NUM,(constchar*)data,len);
}
循環讀寫, 此讀函數不阻塞
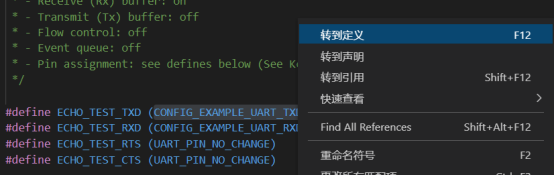
8.串口IO查找
找到串口設置的TX RX ( 我這用的軟件是VS code , 英文版的右擊是 go to definition 推薦選中按f12)

-
串口通信
+關注
關注
34文章
1620瀏覽量
55421 -
ESP32-C3
+關注
關注
0文章
9瀏覽量
367
發布評論請先 登錄
相關推薦
啟明云端WT32C3-S6模塊,樂鑫ESP32-C3低功耗高性能方案,高效無線連接通信

請問ESP32-C3的USB-CDC例程在哪個目錄啊?
ESP32-C3使用SPI通信緩存有多少?
ESP32-C3的USB在計算機上識別的COM口能夠干什么用?
請問ESP32-C3藍牙MESH如何與JDY-24M藍牙MESH組網通信?
請問esp32-c3不支持pcnt嗎?
esp32-c3串口無法下載怎么解決?
啟明云端WT32C3系列模組/開發板連接AWS亞馬遜云方法
充電樁選型對比:ESP32-S3模組和ESP32-C3模組誰更合適
ESP32-C3開發板設計指南
ESP32-C3模塊使用問題集錦| C3的串口日志該如何禁用?





 工商網監
工商網監
評論