") 九軸姿態(tài)傳感器的介紹和應(yīng)用
九軸姿態(tài)傳感器的介紹和應(yīng)用
總體設(shè)計
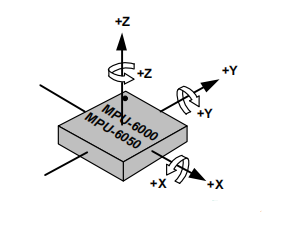
姿態(tài)傳感器是基于MEMS技術(shù)的高性能三維運動姿態(tài)測量系統(tǒng)。它包含三軸陀螺儀、三軸加速度計,三軸電子羅盤等運動傳感器,通過內(nèi)嵌的低功耗ARM處理器得到經(jīng)過溫度補償?shù)娜S姿態(tài)與方位等數(shù)據(jù)。利用基于四元數(shù)的三維算法和特殊數(shù)據(jù)融合技術(shù),實時輸出以四元數(shù)、歐拉角表示的零漂移三維姿態(tài)方位數(shù)據(jù)。
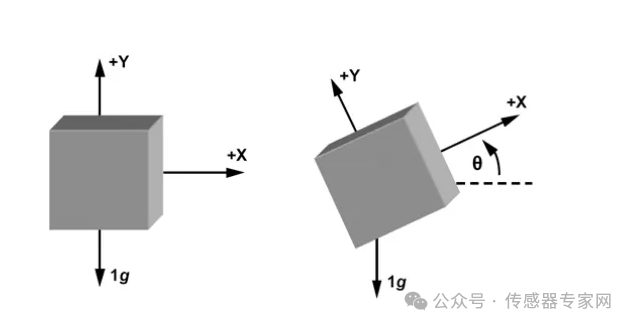
姿態(tài)傳感器內(nèi)部采用高分辨力差分?jǐn)?shù)模轉(zhuǎn)換器,內(nèi)置自動補償和濾波算法,最大程度減小了環(huán)境變化引起的誤差。把靜態(tài)重力場的變化轉(zhuǎn)換成傾角變化,通過數(shù)字方式直接輸出當(dāng)前的橫滾角和俯仰角,產(chǎn)品安裝方便、使用簡單、體積小、抗外界電磁干擾、承受振動沖擊能力強。
?

??姿態(tài)傳感器通過采集傳感器的數(shù)據(jù),融合卡拉曼濾波,輸出實時的姿態(tài)數(shù)據(jù)。由于采用三軸加速度計和三軸磁傳感器輔助陀螺以及溫度補償?shù)乃惴夹g(shù),使得該產(chǎn)品實現(xiàn)全姿態(tài)優(yōu)異的穩(wěn)定性和實時性。該產(chǎn)品不僅能輸出姿態(tài)數(shù)據(jù),還能輸出三軸加速度計,三軸陀螺儀以經(jīng)三軸磁場9軸數(shù)據(jù),適用各種應(yīng)用平臺。
硬件設(shè)計
如下圖所示為系統(tǒng)硬件總框圖
?
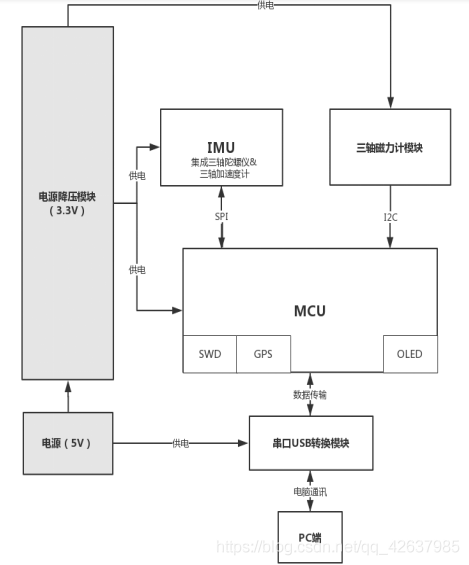
?主要分為電源模塊、單片機模塊、磁傳感模塊、加速度傳感模塊和RS-232接口模塊。
?
?
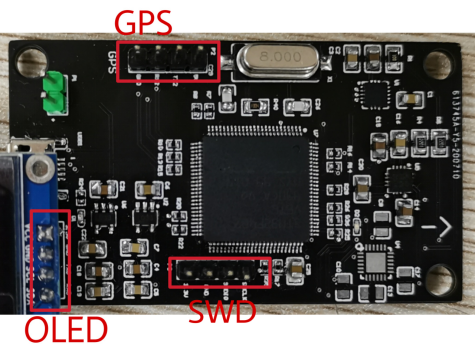
?實體電路板示意圖如上圖所示。
軟件設(shè)計
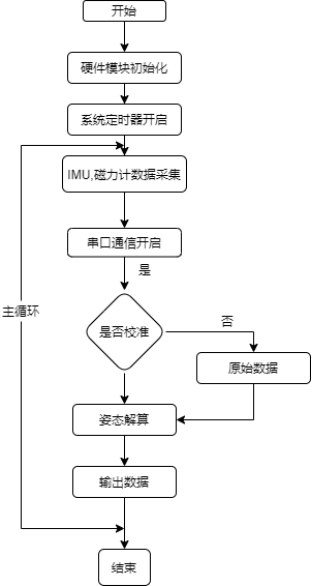
如下圖所示為系統(tǒng)軟件總框架圖
?
?
?主要可以分為初始化、采集、通信、解析、輸出等幾個環(huán)節(jié),產(chǎn)品配套有成熟的上位機軟件可以很簡便地直接使用,并且可以根據(jù)需求進(jìn)行功能或界面的修改。
應(yīng)用
姿態(tài)傳感器可廣泛應(yīng)用于航模無人機,機器人,天線云臺,聚光太陽能,地面及水下設(shè)備,虛擬現(xiàn)實,人體運動分析等需要低成本、高動態(tài)三維姿態(tài)測量的產(chǎn)品設(shè)備中。
?
-
姿態(tài)測量
+關(guān)注
關(guān)注
0文章
8瀏覽量
8260 -
姿態(tài)控制
+關(guān)注
關(guān)注
0文章
9瀏覽量
7600 -
姿態(tài)解算
+關(guān)注
關(guān)注
0文章
49瀏覽量
8241
發(fā)布評論請先 登錄
相關(guān)推薦
什么是雙軸傾角傳感器
《DNK210使用指南 -CanMV版 V1.0》第二十三章 六軸傳感器——姿態(tài)解算實驗
MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合

何謂地磁傳感器?

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹

深入了解六軸力傳感器:原理、分類與應(yīng)用
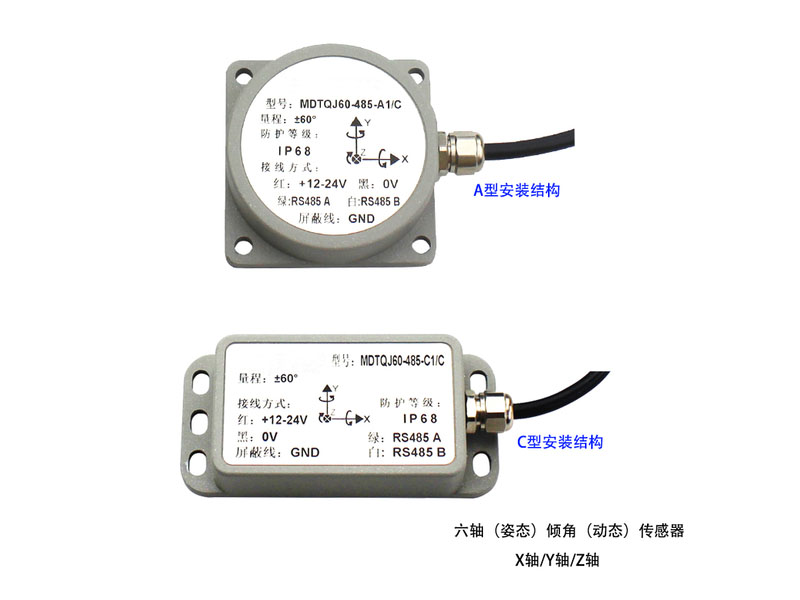
六軸姿態(tài)傾角動態(tài)傳感器
6軸傳感器的工作原理及應(yīng)用領(lǐng)域

藍(lán)尊科技三軸傾角傳感器上新
BMX055九軸傳感器已經(jīng)調(diào)通,但是陀螺儀數(shù)據(jù)有點波動為什么?
什么是姿態(tài)傳感器MPU6050
村田推出小型6軸慣性傳感器SCH16T-K01
雙軸傾角傳感器的工作原理 雙軸傾角傳感器可檢測什么
磁力計LIS2MDL開發(fā)(3)----九軸姿態(tài)解算






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論