 智造之眼?機器視覺飛拍,助力企業智造!
智造之眼?機器視覺飛拍,助力企業智造!
1.什么是機器視覺飛拍
在機器視覺檢測項目中,我們經常采用停拍的拍照方式,即檢測樣品運動到指定拍照位置時,樣品停止運動,此時觸發相機拍照,對樣品圖像進行處理后,再執行下一步動作。
雖然這種拍照模式的實現方式和運動控制比較簡單,但是生產效率較低,無法滿足高速度的檢測項目要求。
因此,很多情況下需要采用視覺飛拍的功能,即檢測樣品運動到拍照位置時不停止運動,此時相機完成瞬時拍照后樣品繼續運行。
2.智造之眼?飛拍應用系統架構圖

棱鏡視覺系統:主要由相機、鏡頭、光源、光源控制器、視覺處理器等組成。根據檢測品運動速度的快慢,視覺系統對相機響應時間、曝光時間以及鏡頭光圈、像素和光源等都有一定的要求。
3.視覺定拍與飛拍的對比
(1)視覺定拍
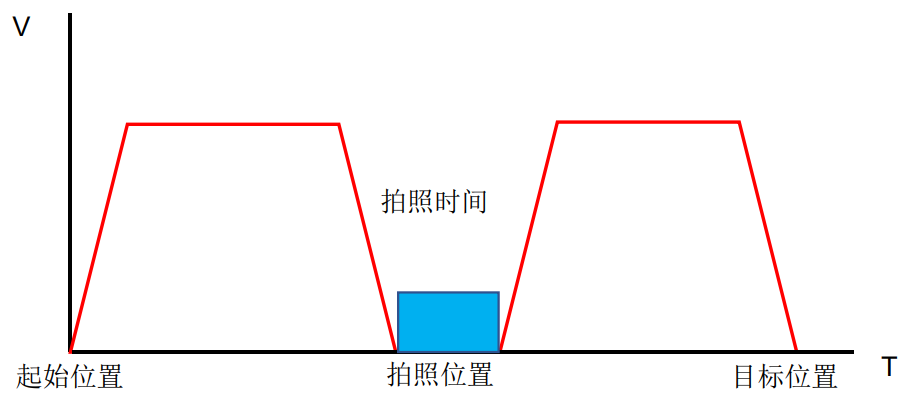
傳統的視覺定位采取定拍的方式,即機構按既定的軌跡運動,當運行到拍照點時,運動軸速度減為0停下來進行拍照、圖像采集、運算處理、糾偏,待視覺系統處理完成后,繼續完成接下來的軌跡運動,V-T圖如下:
(2)視覺飛拍
針對傳統的視覺定拍方式生產效率不夠高的問題,在一些應用場合,越來越多地使用視覺飛拍來進行視覺定位與檢測。
機構按照既定的軌跡運動,當運行到拍照點時,運動軸不停下,相機瞬間完成飛行抓拍的功能。由于整個過程中移動機構不停止,從而大量節省機構運行時間,提高效率,并且能保證運行精度。
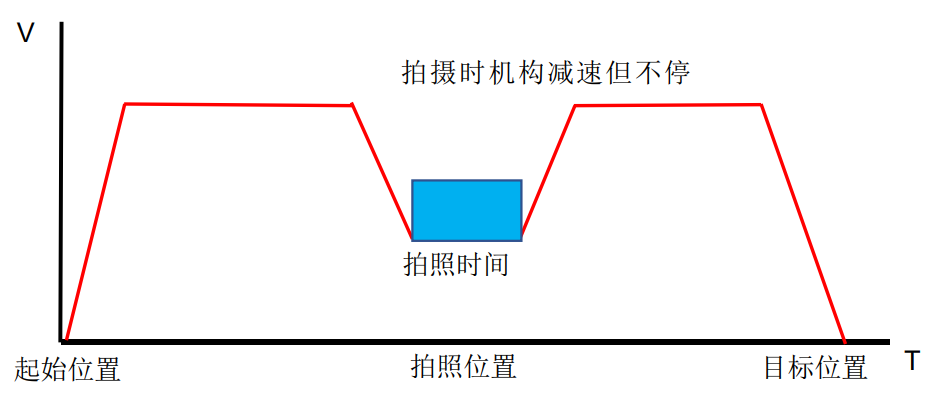
?在精度足以保證的情況下,可以不減速,V-T圖如下:

?在精度不足的情況下,可略微降速,分段運行,但速度不降為0,V-T圖如下:
4.應用案例
(1)麥拉飛拍定位項目—方案亮點
物料無需暫停,機構連續吸取物料,相比靜態吸料,提高效率,減少機臺CT。
進一步提升精度,現場實測貼合定位精度,貼合定位精度可達±0.05mm。
視覺硬件環境可根據機構的速度定制。
 麥拉飛拍定位
麥拉飛拍定位(2)鍍金飛拍檢測項目—方案亮點
載帶無需停止。
檢測速度能夠達到12m/s,檢測精度達到±0.04mm。
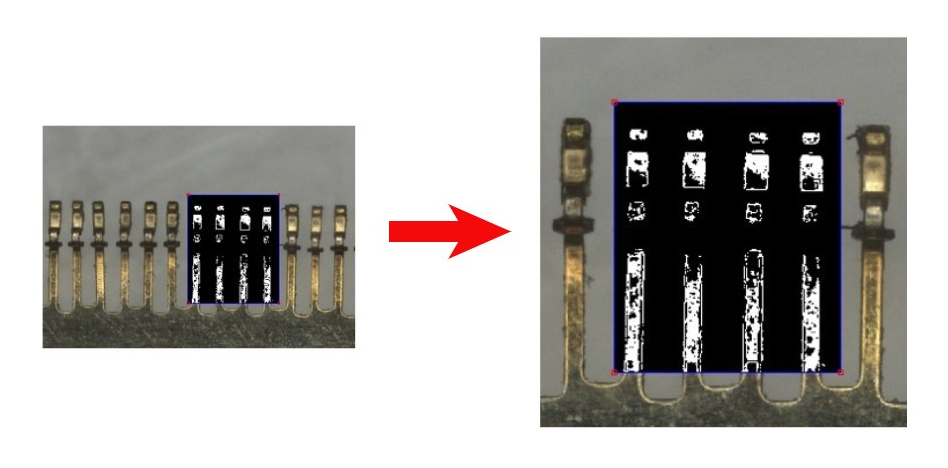 鍍金飛拍檢測
鍍金飛拍檢測智造之眼-Kenexs視覺團隊深耕視覺應用多年,深知客戶場景需要,綜合考量最大化客戶的生產效益,同時保證檢測精度高、速度快雙向指標
-
機器視覺
+關注
關注
161文章
4345瀏覽量
120111 -
人工智能
+關注
關注
1791文章
46859瀏覽量
237562
發布評論請先 登錄
相關推薦
第六屆鼎捷智造節:數智服務商聯手助力中國智造

奧迪威機器人發布兩大精密制造設備,助力生產向智造跨越!

華南慕尼黑電子生產設備展 | 奧迪威機器人發布兩大精密制造設備,助力生產向智造跨越!

驅動未來工廠,微億智造與捷勃特全球首發具身智能工業機器人

大研智造激光錫球焊:未來制造的精準之選

奧迪威參加三大海外展會,智能感知與執行技術助力全球“智造”升級!
航順芯片亮相CICD年會主論壇,HK32MCU助力中國智造產業升級

廣和通AIoT解決方案助力AI之眼探索視界
廣和通AIoT解決方案助力AI之眼探索視界

5家機器視覺相關企業2023年度業績快報正陸續出爐





 工商網監
工商網監
評論