 【GD32L233C-START】DAC輸出(正弦波、鋸齒波、方波)
【GD32L233C-START】DAC輸出(正弦波、鋸齒波、方波)
1.介紹
GD32L233C采用的是一款M23的內核。這個芯片據說功耗非常的低,低到什么程度呢?等后面我們再進行測試,今天我們主要來測試GD32L233C-START的DAC,既然要測試DAC,示波器是不可少的,這個實驗在家做,然而LZ家里并沒有示波器,不過最近看到一款好東西,LOTO虛擬示波器,看過這款示波器的參數,還不錯。所以入手了一款,測量芯片輸出的DAC應該沒什么問題,接下來開始測試吧。
2.設計
首先需要輸出讓芯片輸出DAC,而且還需要輸出波形,這個稍微費點功夫,之前在GD32L233C-START移植了RTThread,現在在這個代碼的基礎上添加DAC的輸出程序,這個程序移植了其他網友的,代碼我也貼出來,經過測試,代碼沒有啥問題:
比較麻煩的是正弦波的代碼:
const float sinus_I_quarter[91] =
{
0.0000, 0.0175, 0.0349, 0.0523, 0.0698, 0.0872, 0.1045, 0.1219, 0.1392, 0.1564, // 00 .. 09
0.1736, 0.1908, 0.2079, 0.2250, 0.2419, 0.2588, 0.2756, 0.2924, 0.3090, 0.3256, // 10 .. 19
0.3420, 0.3584, 0.3746, 0.3907, 0.4067, 0.4226, 0.4384, 0.4540, 0.4695, 0.4848, // 20 .. 29
0.5000, 0.5150, 0.5299, 0.5446, 0.5592, 0.5736, 0.5878, 0.6018, 0.6157, 0.6293, // 30 .. 39
0.6428, 0.6561, 0.6691, 0.6820, 0.6947, 0.7071, 0.7193, 0.7314, 0.7431, 0.7547, // 40 .. 49
0.7660, 0.7771, 0.7880, 0.7986, 0.8090, 0.8192, 0.8290, 0.8387, 0.8480, 0.8572, // 50 .. 59
0.8660, 0.8746, 0.8829, 0.8910, 0.8988, 0.9063, 0.9135, 0.9205, 0.9272, 0.9336, // 60 .. 69
0.9397, 0.9455, 0.9511, 0.9563, 0.9613, 0.9659, 0.9703, 0.9744, 0.9781, 0.9816, // 70 .. 79
0.9848, 0.9877, 0.9903, 0.9925, 0.9945, 0.9962, 0.9976, 0.9986, 0.9994, 0.9998, // 80 .. 89
1.0000 // 90
};
#define CIRCLE_QUARTER_1 1
#define CIRCLE_QUARTER_2 2
#define CIRCLE_QUARTER_3 3
#define CIRCLE_QUARTER_4 4
float sinus_lookup (unsigned int angle)
{
float sin_value;
unsigned int circle_quarter;
// correct angles outside the accepted angle range into 0 .. 359
if (angle > 359u)
angle = angle % 360u;
circle_quarter = 1 + (angle / 90u);
switch (circle_quarter)
{
case CIRCLE_QUARTER_1: // 00 .. 89
sin_value = sinus_I_quarter[angle];
break;
case CIRCLE_QUARTER_2: // 90 .. 179
sin_value = sinus_I_quarter[180 - angle];
break;
case CIRCLE_QUARTER_3: // 180 .. 269
sin_value = -sinus_I_quarter[angle - 180];
break;
case CIRCLE_QUARTER_4: // 270 .. 359
sin_value = -sinus_I_quarter[360 - angle];
break;
}
return sin_value;
}
void plot_sin(uint32_t f, uint32_t delta_f)
{
/* 定時周期為T=1/delta_f, f=1/(pMax*T) */
static uint32_t point = 0;
uint32_t pMAX = delta_f/f;
uint32_t value = 0;
if (point++ > pMAX) point = 0;
value = (uint32_t)((sinus_lookup(360*point/pMAX)+1)*10000)*2047/10000;
dac_software_trigger_enable();
dac_data_set(DAC_ALIGN_12B_R, value);
}
接下來是鋸齒波和方波的代碼,這兩個代碼比較簡單:
void plot_triangle(uint32_t f, uint32_t delta_f)
{
/* 定時周期為T=1/delta_f, f=1/(pMax*T) */
static uint32_t point = 0;
uint32_t pMAX = delta_f/f;
uint32_t pMAX2 = pMAX/2;
uint32_t value = 0;
if (++point > pMAX) point = 0;
if (point < pMAX2)
{
value = point * 4095 / pMAX2;
}
else
{
value = (pMAX - point) * 4095 / pMAX2;
}
dac_software_trigger_enable();
dac_data_set(DAC_ALIGN_12B_R, value);
}
void plot_square(uint32_t f, uint32_t delta_f)
{
/* 定時周期為T=1/delta_f, f=1/(pMax*T) */
static uint32_t point = 0;
uint32_t pMAX = delta_f/f;
uint32_t pMAX2 = pMAX/2;
uint32_t value = 0;
if (++point > pMAX) point = 0;
if (point < pMAX2)
{
value = 0;
}
else
{
value = 0xFFF;
}
dac_software_trigger_enable();
dac_data_set(DAC_ALIGN_12B_R, value);
}
最后需要開啟一個定時器,還有DAC的初始化:
void timerx_init(uint32_t timer_periph, uint16_t period, uint16_t prescaler)
{
/* TIMER1 configuration: input capture mode -------------------
the external signal is connected to TIMER1 CH0 pin (PA0)
the rising edge is used as active edge
the TIMER1 CH0CV is used to compute the frequency value
------------------------------------------------------------ */
timer_parameter_struct timer_initpara;
timer_ic_parameter_struct timer_icinitpara;
/* enable the peripherals clock */
rcu_periph_clock_enable(RCU_TIMER2);
/* deinit a TIMER */
timer_deinit(timer_periph);
/* initialize TIMER init parameter struct */
timer_struct_para_init(&timer_initpara);
/* TIMER1 configuration */
timer_initpara.prescaler = prescaler;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = period;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_init(timer_periph, &timer_initpara);
/* TIMER1 CH0 input capture configuration */
timer_icinitpara.icpolarity= TIMER_IC_POLARITY_RISING;
timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI;
timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1;
timer_icinitpara.icfilter = 0x00;
timer_input_capture_config(timer_periph, TIMER_CH_0, &timer_icinitpara);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(timer_periph);
/* clear channel 0 interrupt bit */
timer_interrupt_flag_clear(timer_periph, TIMER_INT_CH0);
/* channel 0 interrupt enable */
timer_interrupt_enable(timer_periph, TIMER_INT_CH0);
/* enable a TIMER */
timer_enable(timer_periph);
}
#define DAC_WAVE_TEST
void timer2_init(void)
{
timer_deinit(TIMER2);
rcu_periph_clock_enable(RCU_TIMER2);
#ifdef DAC_WAVE_TEST
timerx_init(TIMER2, 639, 9);// 100KHz 0.1ms
#endif
timer_interrupt_enable(TIMER2, TIMER_INT_UP);
nvic_irq_enable(TIMER2_IRQn, 3);
}
void TIMER2_IRQHandler(void)
{
#ifdef DAC_WAVE_TEST
plot_sin(100, 10000); //正弦波
//plot_triangle(1, 10000);//鋸齒波
//plot_square(1, 10000); //方波
#endif
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
}
void dac1_init(void)
{
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_DAC);
gpio_mode_set(GPIOA, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, GPIO_PIN_4);
dac_deinit();
/* software trigger */
dac_trigger_enable();
dac_trigger_source_config(DAC_TRIGGER_SOFTWARE);
/* no noise wave */
dac_wave_mode_config(DAC_WAVE_DISABLE);
/* noise wave - triangle */
//dac_wave_mode_config(DAC_WAVE_MODE_TRIANGLE);
//dac_triangle_noise_config(DAC_TRIANGLE_AMPLITUDE_4095);
/* noise wave - lfsr */
//dac_wave_mode_config(DAC_WAVE_MODE_LFSR);
//dac_lfsr_noise_config(DAC_LFSR_BITS11_0);
dac_output_buffer_enable();
/* enable DAC and set data */
dac_enable();
dac_software_trigger_enable();
dac_data_set(DAC_ALIGN_12B_R, 0);
}
這樣就可以輸出正弦波、鋸齒波和方波了。
3.波形測量
接下來我們來看一下輸出的波形是否符合要求,首先需要將【GD32L233C-START】開發板連接LOTO示波器,分別連接GND和PA4管教,連接效果圖如下圖1所示。
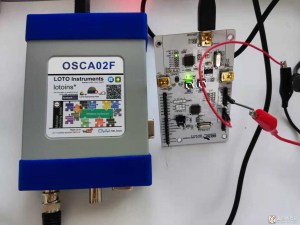
圖1
然后讓DAC輸出正弦波,看一下波形如何。
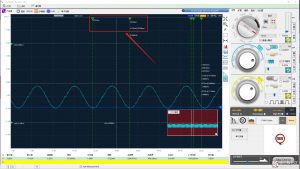
圖2
從上圖2中可以看到,一個周期大約在10ms,所以正弦波的周期為100Hz,輸出還是聽精準的。
然后輸出鋸齒波看看波形如何。
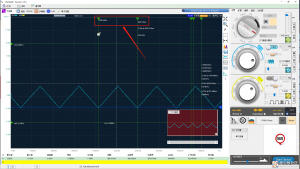
圖3
從上圖3可以得出,鋸齒波的波形頻率為1Hz。
最后我們來看看方波的波形圖如何。
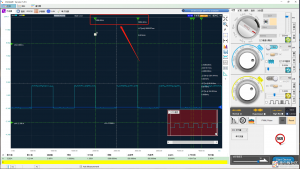
圖4
從上圖4可以看到,方波的波形頻率為1Hz。
從上面波形可以得出,【GD32L233C-START】的定時器比較精準,DAC的輸出值也比較穩定,性能還是不錯的!
4.總結
剛入手的LOTO示波器還不錯,測量的精度挺高的,不過還有好多設置沒弄明白,等后續多琢磨琢磨。做電子的示波器是必不可少的,我先替你們測試測試這個示波器如何。
GD32L233C是新出來的芯片,整體功能還需要多進行測試,它最突出的低功耗后續要好好測量一下,這次就先到這里了。
-
示波器
+關注
關注
113文章
6203瀏覽量
184547
發布評論請先 登錄
相關推薦
為什么DAC8830輸出100mV正弦波的時候毛刺這么大?
正弦波逆變器的定義和基本結構
如何把1khz方波濾成正弦波
220v方波怎樣才能變成正弦波
如何將方波轉換為正弦波
正弦波調制和方波調制的有效值怎么決定?
正弦波逆變器什么意思 正弦波逆變器和普通逆變器有什么區別?
正弦波和方波晶振能否互相替代?
純正弦波逆變器和修正弦波逆變器的區別
為什么用在有齒無刷電機的控制器是方波而不是正弦波輸出?






 工商網監
工商網監
評論