") X3派和PC虛擬機(jī)之間基于ROS2和wifi的通信
X3派和PC虛擬機(jī)之間基于ROS2和wifi的通信
背景介紹
多機(jī)通信是ROS的基礎(chǔ)能力之一,相比于ROS1,ROS2通過(guò)非常簡(jiǎn)單的配置即可實(shí)現(xiàn)多機(jī)通信。
對(duì)于兩個(gè)安裝了ROS2(或者地平線的TogetherROS)的設(shè)備,設(shè)備的IP地址在同一網(wǎng)段,并且ROS_DOMAIN_ID相同(如果不設(shè)置,默認(rèn)是0),即可實(shí)現(xiàn)設(shè)備之間通過(guò)ROS2通信。
下面介紹X3派和PC虛擬機(jī)都連接無(wú)線wifi網(wǎng)絡(luò)的情況下,通過(guò)ROS2實(shí)現(xiàn)跨設(shè)備通信。
準(zhǔn)備工作
X3派
- 已安裝Ubuntu 20.0.4系統(tǒng),安裝方法:1. 快速開(kāi)始 — 旭日X3派用戶手冊(cè) 1.0.0 文檔 (horizon.ai)
- 已安裝ROS2 Foxy,推薦安裝地平線基于ROS2 Foxy深度優(yōu)化和擴(kuò)展的TogetherROS,安裝速度更快。安裝方法:2.2. 通過(guò)DEB包安裝 — 地平線機(jī)器人平臺(tái)用戶手冊(cè) 1.0 文檔 (horizon.ai)
- 已連接wifi,連接方法:2. 系統(tǒng)配置 — 旭日X3派用戶手冊(cè) 1.0.0 文檔 (horizon.ai)
PC虛擬機(jī)
- PC宿主機(jī)為windows,使用VMware workstation 15.5舉例說(shuō)明。
- 虛擬機(jī)已安裝Ubuntu 20.0.4系統(tǒng)。
- 虛擬機(jī)已安裝ROS2 Foxy。
操作方法
- PC宿主機(jī)斷開(kāi)有線連接,和X3派連接同一wifi。
- 虛擬機(jī)網(wǎng)絡(luò)設(shè)置成橋接&復(fù)制物理網(wǎng)絡(luò)連接狀態(tài):
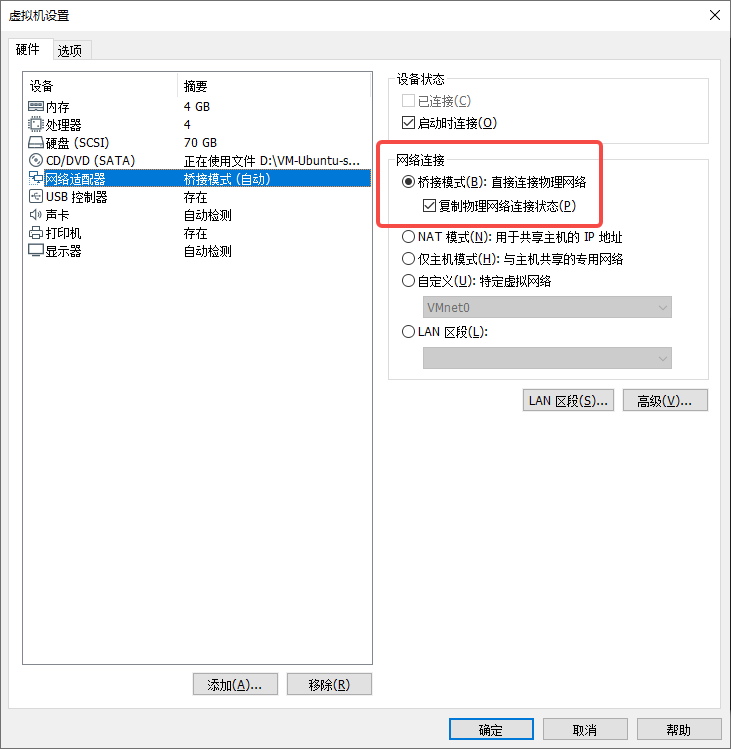
- 啟動(dòng)虛擬機(jī)。
結(jié)果分析
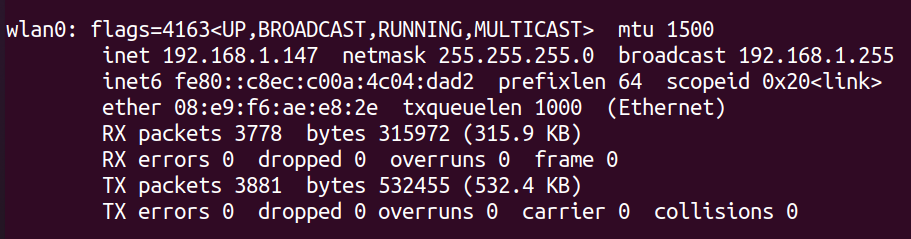
查看X3派的IP地址:
查看PC虛擬機(jī)中Ubuntu的IP地址:
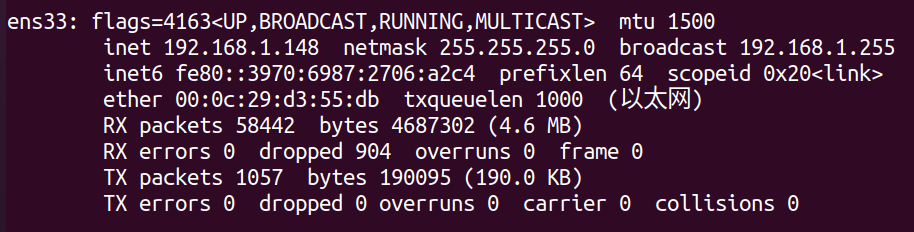
連接同一wifi后,X3派和PC虛擬機(jī)中Ubuntu的IP地址相同。開(kāi)始測(cè)試X3派和PC虛擬機(jī)之間通過(guò)ROS2進(jìn)行通信。
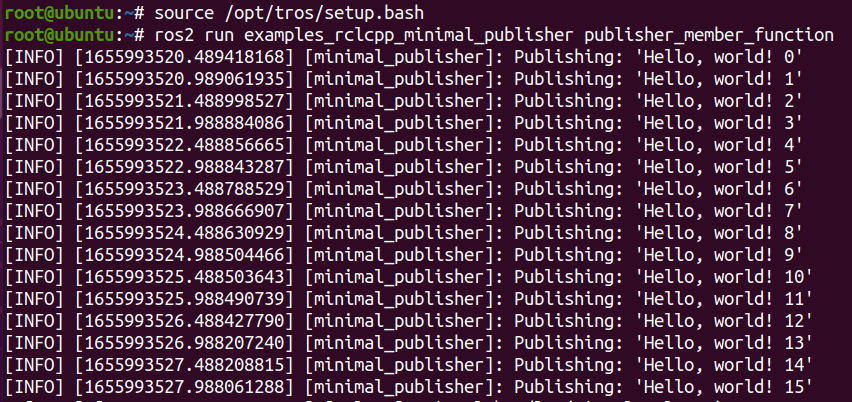
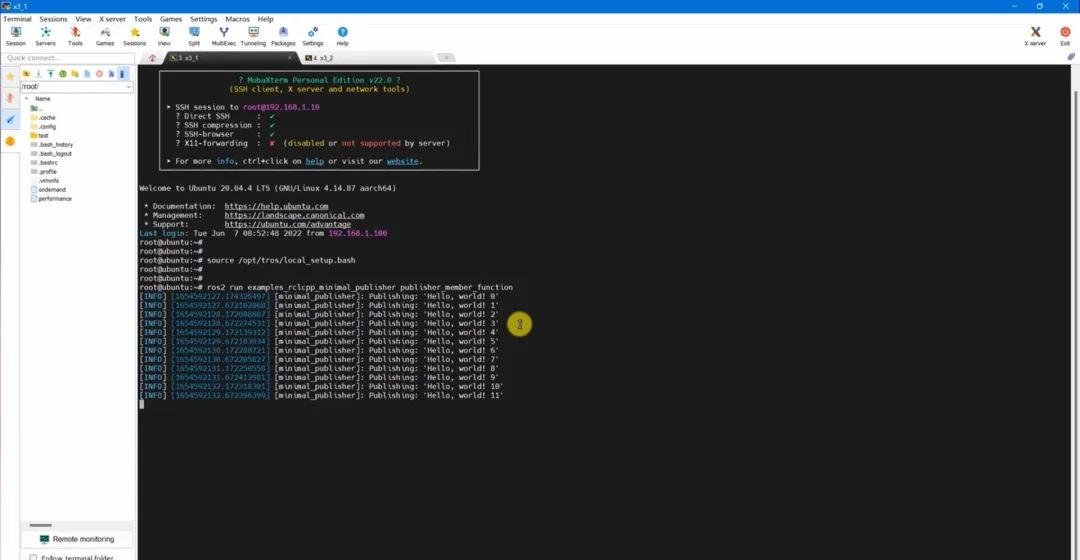
X3派發(fā)布消息:
PC端訂閱消息:
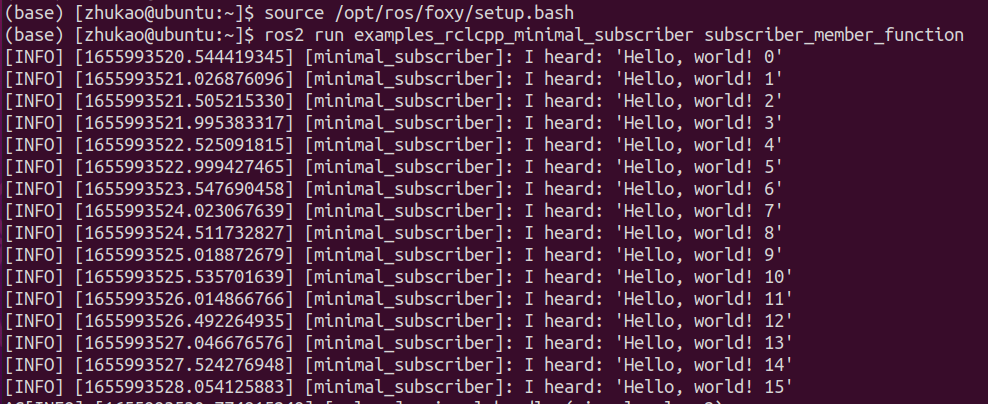
可以看到,PC端的ROS2 Foxy訂閱到了X3派TogetherROS發(fā)布的消息,說(shuō)明兩個(gè)設(shè)備在連接同一wifi的情況下,通過(guò)ROS2跨設(shè)備通信成功。
本文轉(zhuǎn)載自地平線開(kāi)發(fā)者社區(qū)
原作者:zhuk
原鏈接:https://developer.horizon.ai/forumDetail/98129467158916230
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2903文章
44262瀏覽量
371219 -
人工智能
+關(guān)注
關(guān)注
1791文章
46845瀏覽量
237535
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
虛擬化數(shù)據(jù)恢復(fù)—XenServer虛擬機(jī)數(shù)據(jù)恢復(fù)案例
Server操作系統(tǒng)虛擬機(jī),該虛擬機(jī)有2塊虛擬磁盤(系統(tǒng)盤+數(shù)據(jù)盤),當(dāng)作網(wǎng)站服務(wù)器使用。
服務(wù)器虛擬化故障:
XenServer
虛擬機(jī)數(shù)據(jù)恢復(fù)—異常斷電導(dǎo)致XenServer虛擬機(jī)不可用的數(shù)據(jù)恢復(fù)案例
虛擬機(jī)數(shù)據(jù)恢復(fù)環(huán)境:
某品牌服務(wù)器通過(guò)同品牌某型號(hào)的RAID卡,將4塊STAT硬盤為一組RAID10陣列。上層部署XenServer虛擬化平臺(tái),虛擬機(jī)安裝Windows Server系統(tǒng),每臺(tái)
虛擬機(jī)數(shù)據(jù)恢復(fù)—KVM虛擬機(jī)被誤刪除的數(shù)據(jù)恢復(fù)案例
:EXT4
主要數(shù)據(jù):MySQL數(shù)據(jù)庫(kù)
虛擬機(jī)2:備份數(shù)據(jù)庫(kù)服務(wù)器
虛擬磁盤:系統(tǒng)盤(qcow2)+數(shù)據(jù)盤(raw)
文件系統(tǒng):EXT4
主要數(shù)據(jù):MySQL數(shù)據(jù)庫(kù)
什么是虛擬機(jī)?虛擬機(jī)真的那么好用嗎?
在日新月異的科技世界中,虛擬化技術(shù)如同一座橋梁,連接著現(xiàn)實(shí)與數(shù)字的鴻溝,為我們打開(kāi)了全新的計(jì)算維度。虛擬機(jī),這一概念,自其誕生以來(lái),就以其獨(dú)特的魅力和強(qiáng)大的功能,深深地影響了軟件開(kāi)發(fā)、系統(tǒng)測(cè)試和云

ZMC900E控制器之ROS2環(huán)境安裝指南
ZMC900E是致遠(yuǎn)電子研發(fā)的最新一代高性能EtherCAT控制器,支持ROS2系統(tǒng),兼?zhèn)鋸?qiáng)大功能和實(shí)時(shí)性,為工業(yè)應(yīng)用帶來(lái)新的可能。本文將詳述ROS2特點(diǎn)和安裝,助力用戶在機(jī)器人上的二次開(kāi)發(fā)

虛擬機(jī)的ip地址和主機(jī)一樣嗎
地址,用于與其他設(shè)備進(jìn)行通信。下面將詳細(xì)介紹虛擬機(jī)的IP地址和主機(jī)的IP地址之間的區(qū)別和聯(lián)系。 IP地址是用于在網(wǎng)絡(luò)中唯一標(biāo)識(shí)設(shè)備的一串?dāng)?shù)字。在TCP/IP協(xié)議棧中,IP地址被用于路由數(shù)據(jù)包,并將數(shù)據(jù)從源設(shè)備傳遞到目標(biāo)設(shè)備。每個(gè)
系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開(kāi)發(fā)環(huán)境嗎?
請(qǐng)問(wèn)一下,百度文庫(kù)資料里面,下圖所示的系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開(kāi)發(fā)環(huán)境嗎?與前面4GB版本的鏡像有什么區(qū)別?
發(fā)表于 03-01 23:06
【鴻蒙】(一)Vmware虛擬機(jī)和Ubuntu安裝
備注 虛擬機(jī)命名、用戶名稱、路徑不能有漢字 名稱或者路徑有漢字,導(dǎo)致輸入失敗或者安裝失敗 2.虛擬機(jī)處理器內(nèi)核總數(shù)(處理器數(shù)量 X 每個(gè)處理器的內(nèi)核數(shù)量)不得超過(guò)電腦邏輯處理器總個(gè)數(shù)

VMware虛擬機(jī)的三種網(wǎng)絡(luò)模式
VMware虛擬機(jī)的三種網(wǎng)絡(luò)模式 VMware是一種廣泛使用的虛擬機(jī)軟件,可以創(chuàng)建和管理多個(gè)虛擬機(jī)。在使用VMware虛擬機(jī)時(shí),網(wǎng)絡(luò)設(shè)置非常重要,因?yàn)樗鼪Q定了
虛擬機(jī)ubuntu怎么聯(lián)網(wǎng)
與外部網(wǎng)絡(luò)通信。本文將詳細(xì)介紹虛擬機(jī)Ubuntu的網(wǎng)絡(luò)連接方法以及一些常見(jiàn)的網(wǎng)絡(luò)問(wèn)題解決辦法。 一、虛擬機(jī)網(wǎng)絡(luò)概述 虛擬機(jī)的網(wǎng)絡(luò)連接有多種方式,包括橋接模式(Bridge)、NAT模式
【米爾-TIAM62開(kāi)發(fā)板-接替335x-試用評(píng)測(cè)】(一)基于TIAM62開(kāi)發(fā)板的ROS2交叉編譯
【米爾-TIAM62開(kāi)發(fā)板-接替335x-試用評(píng)測(cè)】(一)ROS2交叉編譯
1. 前言
該測(cè)試報(bào)告詳細(xì)介紹了TIAM62開(kāi)發(fā)板的交叉編譯環(huán)境、ROS2編譯的步驟以及遇到的問(wèn)題和解決方案、簡(jiǎn)單的測(cè)試
發(fā)表于 12-05 20:58
在TogetherROS中如何安裝ROS2功能包
安裝ROS2功能包 接下來(lái),還有一個(gè)很重要的配置,那就是安裝ROS2功能包,我們說(shuō)TogetherROS是基于ROS2深度優(yōu)化的,很多模塊還是會(huì)復(fù)用ROS2中的功能,所有

ROS2中自帶例程測(cè)試
如果你是一個(gè)ROS2的開(kāi)發(fā)者,可能對(duì)剛才我們使用的ROS2命令比較熟悉,這時(shí)你可能也會(huì)產(chǎn)生一個(gè)問(wèn)題:我們之前也安裝了ROS2系統(tǒng),那ROS2的原生功能還可以正常運(yùn)行么? 我們?cè)賮?lái)試一試

TogetherROS系統(tǒng)的通信功能測(cè)試
通信測(cè)試 先來(lái)測(cè)試一下TogetherROS?·Bot系統(tǒng)的通信功能。 我們需要啟動(dòng)兩個(gè)終端,分別連接到旭日X3派上,并分別按以下命令配置環(huán)境變量。 終端1: ** source /o
ros1和ros2的通信模型
數(shù)據(jù) ROS2: 參與者(DomainParticipant):一個(gè)參與者Participant就是一個(gè)容器,對(duì)應(yīng)于一個(gè)使用DDS的用戶,任何DDS的用戶都必須通過(guò)Participant來(lái)訪問(wèn)全局






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論