") 帶您了解軍億無人機反制槍|無人機反制系統(tǒng)
帶您了解軍億無人機反制槍|無人機反制系統(tǒng)
隨著我們公司客戶的不斷積累,對無人機反制系統(tǒng)的需求越來越多,但是很多客戶都不太了解無人機反制系統(tǒng)的原理。今天深圳軍億電子就帶大家來了解一下。
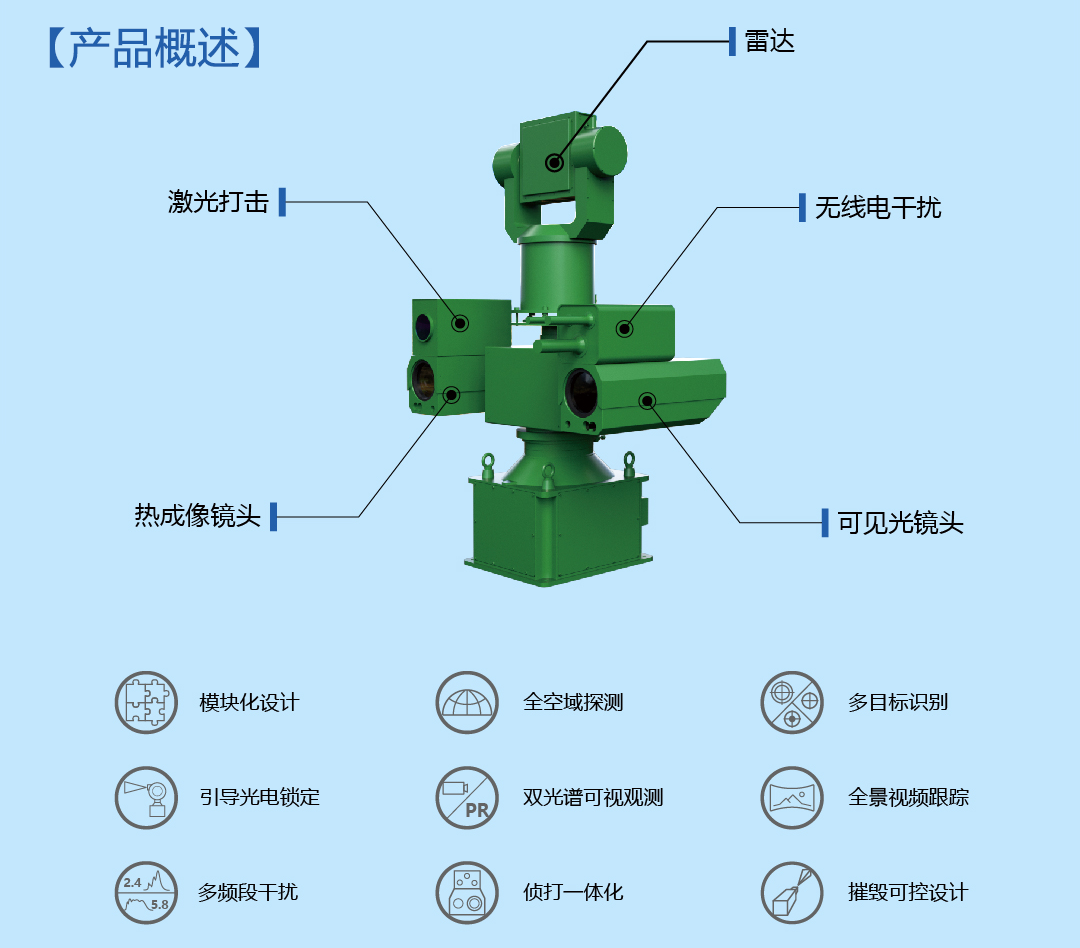
無人機反制系統(tǒng)大致分為:雷達探測,無線電偵測,光電跟蹤這三種方式。
雷達探測:無人制反制系統(tǒng)里用的最普遍的一種。按照掃描方式可以分為相掃、機掃等;按照不同的調制方式,把雷達劃分為脈沖編碼、線性調頻。
雷達技術在民航飛行上技術非常成熟,雷達探測過程中具有定位精準度高,遠距離可探測,反應速度快等優(yōu)點。但是雷達探測在無人機低速飛行時或者處于懸浮狀態(tài)下,因為多普勒頻移較低,雷達就不能準確地探測到無人機。同時雷達探測時需要雷達天線,對架設天線的要求較高,建設成本較高。當雷達探測時遇到障礙物,比如大樹,高樓等就會出現(xiàn)無法探測到的情況。
無線電偵測:無人機的頻段包含1.5G、2.4G和5.8G頻段,通過無線電偵測對黑飛的無人機進行自動識別、分析、傳輸數(shù)據(jù)。通過頻段來探測無人機,即使有障礙物,只要無人機發(fā)出相應頻段,都可以探測到。無線電偵測也是無人機反制系統(tǒng)中用的最多的一項技術。但是無線電偵測也存在不足,當無人機進行靜默狀態(tài)時,依靠無線電偵測就無法實現(xiàn)。所謂的靜默狀態(tài),即無人機按照原先設計好的線路飛行時,就屬于靜默飛行。這個時候就需要配合雷達探測,達到1+1>2的效果。
光電跟蹤:光電跟蹤系統(tǒng)包括陀螺穩(wěn)定轉臺、光學跟蹤設備和紅外跟蹤設備。當出現(xiàn)不明無人機在區(qū)域內飛行時,光電跟蹤就能準確跟蹤到無人機的位置情況進行鎖定。
以上就是無人機反制系統(tǒng)的大致分類。當我們遇到不同客戶的不同需求時,公司會制定不同的反制系統(tǒng)方案。包括多個系統(tǒng)協(xié)同工作,多套系統(tǒng)的聯(lián)動,根據(jù)需要可以進行調整,靈活性高。
-
無人機
+關注
關注
228文章
10340瀏覽量
179633
發(fā)布評論請先 登錄
相關推薦
UAV反制槍如何應對國慶假期無人機亂飛?
特信無人機反制|無人機反制槍:現(xiàn)代空域安全的守護者
深圳特信無人機反制|什么是無人機反制系統(tǒng)?
知語科技無人機反制系統(tǒng)的應用與挑戰(zhàn)
特信無人機反制|無人機反制先鋒:探索反無人機系統(tǒng)與設備廠家的核心技術
演唱會無人機亂飛,無人機反制槍守護安全|特信無人機反制
無人機反制領域的10個基礎問題,你都了解了嗎?|特信無人機反制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論