 開發者說 | 地平線程序員奶爸帶你玩轉機器人開發平臺 —— 第一期 手勢控制
開發者說 | 地平線程序員奶爸帶你玩轉機器人開發平臺 —— 第一期 手勢控制
在地平線工作了4年多了,原本是沖著地平線機器人,機器人這三個字來的地平線,結果很長一段時間地平線都沒搞機器人,我倒是給孩子買了不少機器人。
比如這個,

手勢操控機器人,東西不錯,很便宜,但是得帶個手套,一點不AI。
再比如這個,

也很便宜,能語音對話,遙控下能跑跑,但也一點不AI。
身為一個地平線資深程序員奶爸,手里有大把現成的AI武器,必須得用上,恰好地平線剛剛發布了機器人開發平臺Horizon Hobot Platform,我準備把里面的各種算法都裝進一個機器人里面(都是公開的哦),不管孩子喜不喜歡,但要先體現老爸的厲害,先從最簡單的手勢控制搞起。
1 功能介紹
大家先看一下最終實現的功能。
- “666手勢”手勢控制機器人前進
- “yeah”手勢控制機器人后退
- “大拇指向右”手勢控制機器人右轉
- “大拇指向左”手勢控制機器人左轉
(里面的語音播報是示意,下期給大家講語音控制機器人)
從最終實現的功能效果來看,機器人能夠迅速響應人手的控制指令,得益于X3派上5Tops算力的BPU可以實現低延遲(50ms左右)、高幀率(滿幀30fps)、遠距離(>=5m)的算法推理能力。
開始碼代碼前,先來簡單分析一下手勢操控機器人需要具備哪些基本模塊。
- 傳感
對于手勢識別這類基于視覺的AI算法應用,首先需要有視覺傳感器來捕捉圖像數據。
- 感知
獲取到傳感器發布的圖像后,通過視覺算法進行推理,檢測到人手并且識別出手勢,實現感知的能力。
- 交互
識別出手勢之后,需要定義并實現對應不同手勢的功能應用,如使用“大拇指向右”手勢控制機器人向右轉動。
- 控制
根據“交互”模塊輸出的控制指令,實現對機器人的機械控制。
- 機器人本體
當然還需要一個具備運動能力的機器人本體,接收控制指令并控制電機運動,實現最終的通過手勢控制機器人運動的效果。
地平線發布的機器人平臺Horizon Hobot Platform(HHP)內置了豐富易用的機器人開發組件,包含搭建一個智能機器人應用(如機器人手勢控制)所涉及到的所有功能模塊,完全開源免費,并允許開發者二次開發,接下來開始搞起。
2 準備工作
準備搭建機器人手勢控制應用案例的硬件設備和軟件包。
2.1 硬件
硬件包括:
- X3派
- F37 MIPI攝像頭

- 機器人
X3派和HHP適配了本末雙足機器人和小R科技的麥輪小車。這邊為了讓孩子覺得機器人足夠高大上,就用本末的輪足機器人來介紹,沒有的同學也不用擔心,文章后面會介紹自己搭建機器人的方式。

2.2 安裝系統
參考旭日X3派的用戶手冊的安裝系統章節。
2.3 系統配置
配置X3派的無線網絡,參考X3派的用戶手冊的無線網絡章節。
無線網絡配置成功之后,查詢IP地址:
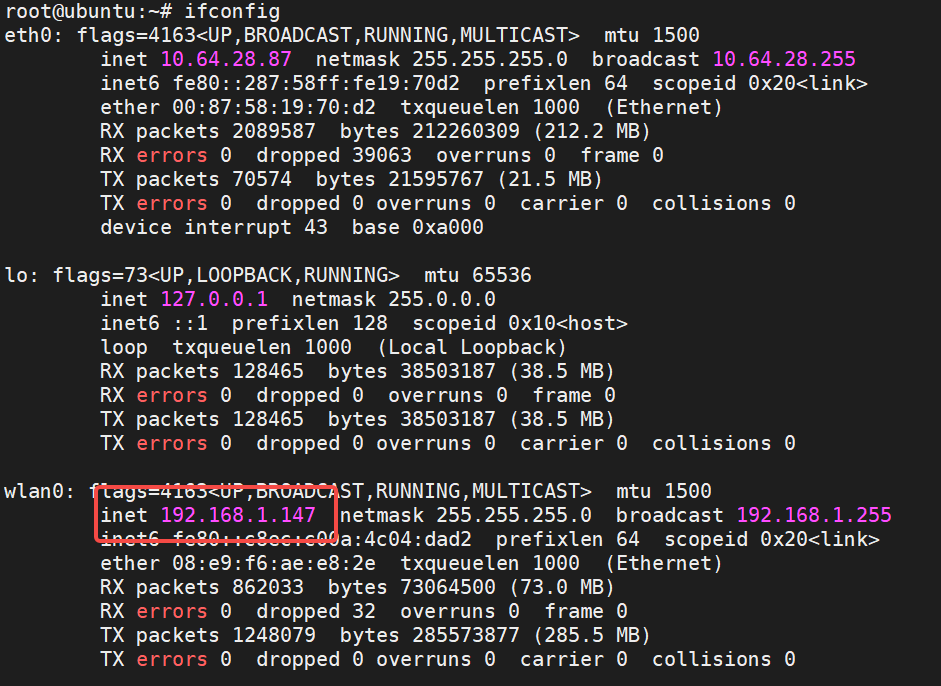
可以看到,X3派的無線網路分配的IP地址為192.168.1.147,下面開始使用這個地址和root賬號(密碼為root)通過ssh遠程連接到X3派,登錄成功后的狀態如下:
2.4 安裝HHP
使用apt命令通過DEB包安裝HHP。
登錄旭日X3派ssh root@192.168.1.147,執行命令sudo apt install hhp,安裝過程如下:
root@ubuntu:~# sudo apt install hhp Reading package lists... Done Building dependency tree Reading state information... Done The following NEW packages will be installed: hhp0 upgraded, 1 newly installed, 0 to remove and 52 not upgraded. Need to get 384 MB of archives. After this operation, 512 MB of additional disk space will be used. Get:1 http://42.62.85.28/ubuntu-ports focal/main arm64 hhp arm64 1.0.1 [384 MB] Fetched 384 MB in 6min 43s (954 kB/s) Selecting previously unselected package hhp.(Reading database ... 110406 files and directories currently installed.) Preparing to unpack .../archives/hhp_1.0.1_arm64.deb ... Unpacking hhp (1.0.1) ... Setting up hhp (1.0.1) ... Generating locales (this might take a while)... en_US.ISO-8859-1... done en_US.UTF-8... done Generation complete.
查看/opt目錄下文件:
root@ubuntu:/userdata# ls /opt/ tros
可以看到HorizonHobotPlatform(HHP)已安裝在/opt目錄下,說明安裝成功。
至此,準備工作結束,下面開始使用這些硬件設備和軟件包搭建機器人手勢控制App。
3 使用介紹
接下來開始搞各個功能模塊,再一步步組裝起來,分別驗證其功能。
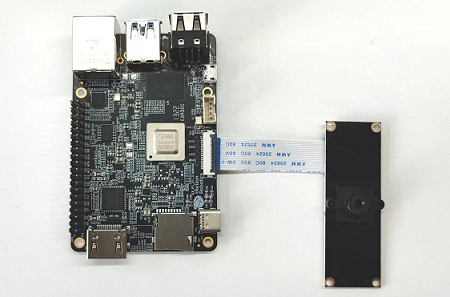
3.1 安裝和測試F37攝像頭
將F37攝像頭通過MIPI線連接到X3派上,連接方式如下:
直接使用HHP中的ROS package測試F37的功能。以下通過腳本啟動攝像頭采集,圖像編碼,web展示功能包,實現將F37攝像頭采集到的圖像進行編碼后,通過PC端web瀏覽器實時查看采集到的圖像。
登錄旭日X3派ssh root@192.168.1.147后,在終端(以下默認終端都是通過ssh登錄)中輸入以下命令啟動:
# 配置 TogetherROS 環境: source /opt/tros/local_setup.bash # 啟動腳本 ros2 launch websocket hobot_websocket.launch.py
啟動成功的終端狀態如下:
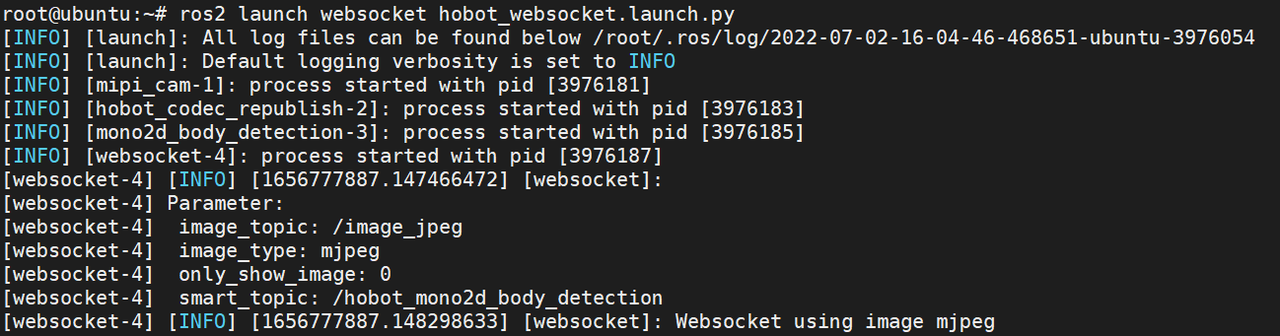
攝像頭開始采集圖像并對外發布圖像消息。
PC瀏覽器(chrome/firefox/edge)輸入旭日X3派IP地址,即可查看F37實時采集到的圖像效果:
說明F37攝像頭已安裝成功并能夠對外發布圖像消息。
3.2 測試手勢識別算法和交互功能
X3派上打開一個終端,啟動手勢識別和控制的腳本:
# 配置TogetherROS環境 source /opt/tros/setup.bash # 從TogetherROS的安裝路徑中拷貝出運行示例需要的配置文件。 cp -r /opt/tros/lib/mono2d_body_detection/config/ . cp -r /opt/tros/lib/hand_lmk_detection/config/ . cp -r /opt/tros/lib/hand_gesture_detection/config/ . #啟動launch文件 ros2 launch gesture_control hobot_gesture_control.launch.py
啟動成功后,對著F37攝像頭做出"Victory"的手勢,終端輸出如下信息:
[gesture_control-7] [WARN] [1652965757.159500951] [GestureControlEngine]: frame_ts_ms: 3698315358, track_id: 2, tracking_sta: 1, gesture: 3 [gesture_control-7] [WARN] [1652965757.159660358] [GestureControlEngine]: do move, direction: 0, step: 0.500000 [gesture_control-7] [WARN] [1652965757.211420964] [GestureControlEngine]: frame_ts_ms: 3698315425, track_id: 2, tracking_sta: 1, gesture: 3 [gesture_control-7] [WARN] [1652965757.211624899] [GestureControlEngine]: do move, direction: 0, step: 0.500000 [gesture_control-7] [WARN] [1652965757.232051230] [GestureControlEngine]: frame_ts_ms: 3698315457, track_id: 2, tracking_sta: 1, gesture: 3 [gesture_control-7] [WARN] [1652965757.232207513] [GestureControlEngine]: do move, direction: 0, step: 0.500000
以上log顯示ID為2(track_id: 2)的人手通過Victory手勢(gesture: 3)控制機器人(tracking_sta: 1)以0.5m/s的速度后退運動(do move, direction: 1, step: 0.500000)。
在PC端瀏覽器上會實時渲染顯示攝像頭采集到的圖像,人體、人頭、人臉和人手檢測框和ID,人手關鍵點和手勢結果,以及實時的性能統計數據,如下圖:
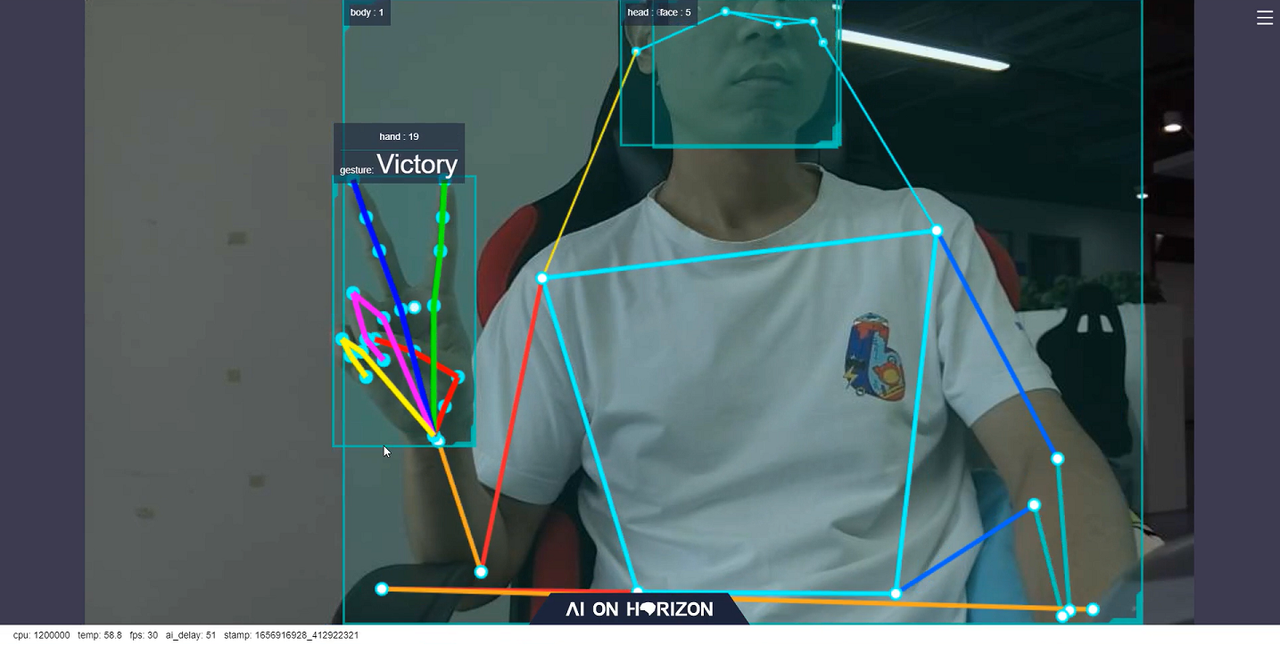
其中瀏覽器下方顯示的fps為實時的AI推理輸出的幀率,和F37攝像頭采集圖像的幀率30fps一致。ai_delay(單位為毫秒)為51,表示的是單幀推理的延遲,從傳感Node發布圖像數據開始,經過多個感知算法Node推理后,發布包含手勢結果的AI msg的耗時。
同時測試了遠距離情況下手勢識別的效果,在距離攝像頭5米的情況下,依然能夠穩定識別出手勢,如下圖所示:

經過以上測試,說明在X3派上,HHP的手勢識別算法運行成功,并且算法可以實現低延遲(51ms)、高幀率(滿幀30fps)、遠距離(>=5m)的算法推理效果,體現了X3 BPU強大的算力。
手勢識別算法測試完成后,接著測試手勢交互功能。
X3派上另起一個終端,執行如下命令查詢X3派上的話題列表:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic list
輸出如下:
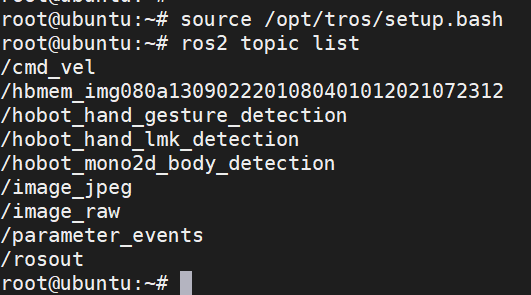
其中/cmd_vel話題是手勢控制節點發布的控制命令消息。在當前終端執行ros2 topic echo /cmd_vel命令查詢X3派上的話題信息,對著F37攝像頭做出"Victory"的手勢時,終端輸出如下:
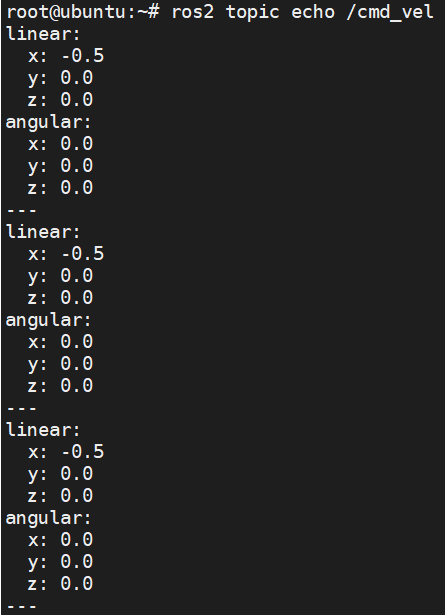
可以看到,做出表示后退的“Victory”手勢時,發布出的/cmd_vel話題的linear x數據為-0.5,表示以0.5m/s的速度后退。
說明手勢識別算法和交互功能的軟件包已安裝成功,并能夠通過/cmd_vel話題對外發布機器人運動控制消息。
3.3 將X3派安裝到機器人上
將X3派安裝到機器人上,并測試在X3派上通過發布/cmd_vel話題控制機器人運動的功能。
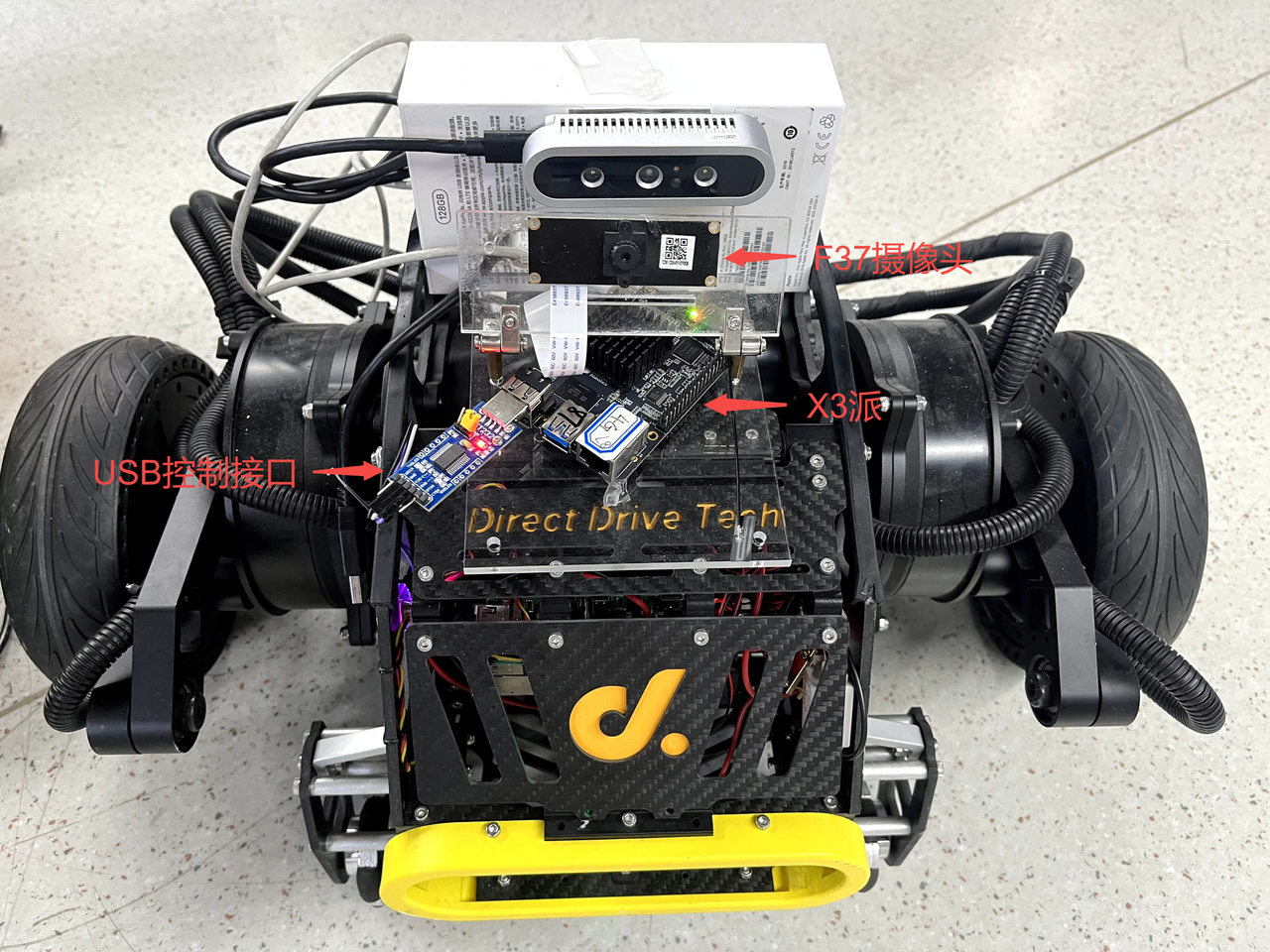
連接了F37攝像頭的X3派直接固定在機器人上,并將機器人的USB控制接口插到X3派上。
安裝效果如下:
對于支持使用ROS開發的機器人,一般會提供一個基于ROS開發的機器人運動控制Node,功能為訂閱/cmd_vel話題的控制消息(ROS2中定義的用于機器人控制的消息,消息類型為geometry_msgs/msg/Twist),根據控制協議,通過USB等接口向機器人發送運動控制指令,實現控制機器人運動的目的。
本文使用的本末雙足機器人使用的是USB接口,并提供了運行在X3派上的運動控制package,package訂閱到/cmd_vel話題的控制消息后,通過USB向機器人下發控制指令,實現對機器人的控制。
在X3派上啟動本末雙足機器人運行控制Node。打開一個終端,執行如下命令:
# 配置TogetherROS環境 source /opt/tros/setup.bash #啟動本末機器人運動控制package ros2 run diablo_sdk ros_bridge_example
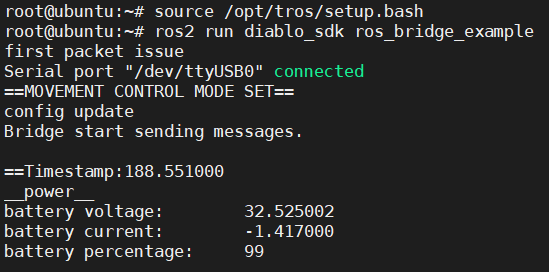
執行成功后終端中輸出如下信息:
X3派上重新打開一個終端,通過發布/cmd_vel話題消息控制機器人以0.3r/s的速度轉動:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.3}}'
執行成功后終端中輸出如下信息:
機器人收到控制指令后轉動的效果如下:

說明機器人能夠按照發布的控制命令消息正確的實現運動。
3.4 對于其他機器人應該怎么安裝
如果手里是其他的移動機器人,例如有一個使用樹莓派或者Jetson Nano作為上位機的機器人,也可以將X3派安裝在機器人上,代替樹莓派或者Jetson Nano,實現控制機器人運動。
安裝方法如下:
- 編譯可以運行在X3派上的運動控制package
- X3派上安裝ROS2軟件系統構建和編譯工具:
apt update apt-get install python3-catkin-pkg pip install empy pip install -U colcon-common-extensions
- 將原先運行在樹莓派或者Jetson Nano上的機器人運動控制ROS2 package源碼拷貝到X3派上。
- 在X3派上,package源碼工程所在路徑下,直接使用source /opt/tros/setup.bash; colcon build命令編譯package。
- 如果原先運動控制package是基于ROS1開發,源碼需要適配到ROS2。只需要適配"cmd_vel"話題消息的訂閱和處理,如果原先的ROS1 package中有其他功能,可以先不關注。
- 安裝
- 將X3派固定在機器人上,如果空間有限,可以將原先的樹莓派或者Jetson Nano拆除。
- 使用USB Type C給X3派供電,如果機器人上無Type C供電輸出,也可以使用移動電源(輸出至少5V&直流 2A)給X3派供電。
- 將機器人的USB控制接口插到X3派上。
- 測試
- X3派上啟動新編譯的機器人運動控制package。
- X3派上重新打開一個終端,通過發布/cmd_vel話題消息控制機器人以0.3r/s的速度轉動:
# 配置TogetherROS環境 source /opt/tros/setup.bash ros2 topic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.3}}'
如果機器人正常轉動,說明X3派安裝成功。
4 完整的機器人手勢控制效果
下面開始測試完整的機器人手勢控制功能。
- X3派上打開一個終端,啟動手勢識別和控制腳本
# 配置TogetherROS環境 source /opt/tros/setup.bash # 從TogetherROS的安裝路徑中拷貝出運行示例需要的配置文件。 cp -r /opt/tros/lib/mono2d_body_detection/config/ . cp -r /opt/tros/lib/hand_lmk_detection/config/ . cp -r /opt/tros/lib/hand_gesture_detection/config/ . #啟動launch文件 ros2 launch gesture_control hobot_gesture_control.launch.py
- X3派上打開一個終端,啟動機器人運動控制Node
# 配置TogetherROS環境 source /opt/tros/setup.bash #啟動本末機器人運動控制Node ros2 run diablo_sdk ros_bridge_example
- 通過手勢控制機器人運動
App的控制效果視頻如下:
5 原理分析
第4章節中,在X3派的兩個終端中分別啟動了hobot_gesture_control.launch.py腳本和運動控制Node,實現了通過手勢控制機器人的效果,本章節對實現的原理進行分析。
5.1 App運行時的Node和Topic信息
對于一個基于ROS開發的App,首先會想到這個App在運行時有哪些Node,這些Node發布和訂閱了哪些Topic,以及這些Node之間的關聯。
在X3派上使用ros2的命令行工具查詢設備上運行的Node和Topic信息:
root@ubuntu:~# source /opt/tros/setup.bash root@ubuntu:~# ros2 node list /gesture_control /gesture_control_parameter_node /hand_gesture_det /hand_lmk_det /hobot_codec1656779158649265431 /mipi_cam /mono2d_body_det /ros_bridge_example /transform_listener_impl_558896ba50 /websocket root@ubuntu:~# ros2 topic list /cmd_vel /hbmem_img080a1309022201080401012021072312 /hobot_hand_gesture_detection /hobot_hand_lmk_detection /hobot_mono2d_body_detection /image_jpeg /image_raw /imu/data_raw /odom /parameter_events /quat_odom /raw_odom /rosout /tf /tf_static
查詢到X3派上運行著多個Node,這些ROS2 Node之間是基于pub&sub機制通信,通過topic將這些Node串聯起來形成一個pipeline。
此App運行時Node以及Topic信息比較多,看不出Node之間的關聯。可以在PC端通過rqt(PC端需要安裝ROS2 Foxy版本,rqt,以及PC需要和X3派處于同一網段)的Node Graph功能可以可視化的展示X3派上運行的Node,Node發布和訂閱的topic,以及Node之間的連接關系,如下圖:

其中橢圓形框內為Node名,矩形框內為topic名。
可以看到,整個graph(pipeline)以mipi_cam Node(圖像采集和發布)為起點,websocket Node(序列化圖片和AI結果,用于可視化展示)和ros_bridge_example Node(機器人運動控制)為終點,起點和終點之間連接著多個Node。
這些Node中ros_bridge_example Node是通過ros2 run diablo_sdk ros_bridge_example命令啟動,其余Node都是通過hobot_gesture_control.launch.py腳本啟動。
5.2 App的Node介紹
對于復雜的包含多個Node的應用,ROS2提供了使用啟動腳本通過launch批量啟動Node的功能。
手勢控制機器人App使用hobot_gesture_control.launch.py腳本來啟動這些Node,腳本內容如下:
import os from launch import LaunchDescription from launch_ros.actions import Node from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from ament_index_python import get_package_share_directory def generate_launch_description(): web_service_launch_include = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join( get_package_share_directory('websocket'), 'launch/hobot_websocket_service.launch.py')) ) return LaunchDescription([ web_service_launch_include, # 啟動圖片發布pkg Node( package='mipi_cam', executable='mipi_cam', output='screen', parameters=[ {"out_format": "nv12"}, {"image_width": 960}, {"image_height": 544}, {"io_method": "shared_mem"}, {"video_device": "F37"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動jpeg圖片編碼&發布pkg Node( package='hobot_codec', executable='hobot_codec_republish', output='screen', parameters=[ {"channel": 1}, {"in_mode": "shared_mem"}, {"in_format": "nv12"}, {"out_mode": "ros"}, {"out_format": "jpeg"}, {"sub_topic": "/hbmem_img"}, {"pub_topic": "/image_jpeg"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動單目rgb人體、人頭、人臉、人手框和人體關鍵點檢測pkg Node( package='mono2d_body_detection', executable='mono2d_body_detection', output='screen', parameters=[ {"ai_msg_pub_topic_name": "/hobot_mono2d_body_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動人手關鍵點檢測pkg Node( package='hand_lmk_detection', executable='hand_lmk_detection', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_mono2d_body_detection"}, {"ai_msg_pub_topic_name": "/hobot_hand_lmk_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動web展示pkg Node( package='websocket', executable='websocket', output='screen', parameters=[ {"image_topic": "/image_jpeg"}, {"image_type": "mjpeg"}, {"smart_topic": "/hobot_hand_gesture_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動手勢識別pkg Node( package='hand_gesture_detection', executable='hand_gesture_detection', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_hand_lmk_detection"}, {"ai_msg_pub_topic_name": "/hobot_hand_gesture_detection"} ], arguments=['--ros-args', '--log-level', 'error'] ), # 啟動手勢交互pkg Node( package='gesture_control', executable='gesture_control', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_hand_gesture_detection"}, {"twist_pub_topic_name": "/cmd_vel"}, {"activate_wakeup_gesture": 0}, {"track_serial_lost_num_thr": 100}, {"move_step": 0.5}, {"rotate_step": 0.5} ], arguments=['--ros-args', '--log-level', 'info'] ) ])
腳本中指定了多個Node,其中每個Node中的package配置項表示Node名,可以看到腳本中配置的Node名和5.1章節中查出來的一致。
在第1章節,分析了機器人手勢操控App所需要具備的功能模塊,下面按照這些功能模塊對Node進行分析。
- 傳感
使用了HHP中的Hobot Sensor組件中的mipi_cam Node,同時指定了Node的參數:
- "out_format":發布圖片的格式為"nv12"
- "image_width":圖片分辨率寬為960
- "image_height":圖片分辨率高為544
- "io_method":發布出來的圖片傳輸方式為"shared_mem",即共享內存方式,對應消息的topic為"hbmem_img"
- "video_device":指定了使用的MIPI攝像頭類型為"F37",表示F37攝像頭
參數指定了使用F37攝像頭,發布的圖片格式和分辨率可以直接用于算法推理,其中通過共享內存方式發布圖片,可以極大地降低系統負載和傳輸延遲。
- 感知
使用了HHP中的Boxs算法倉庫,訂閱Hobot Sensor(mipi_cam Node)發布的圖像數據后,通過視覺算法進行推理,檢測到人手并且識別出手勢。使用到的算法包括:
(1)人體檢測和跟蹤
人體檢測和跟蹤算法Node訂閱Hobot Sensor發布的圖像消息,利用BPU處理器進行AI推理,發布包含人體、人頭、人臉、人手框和人體關鍵點檢測結果的AI msg,并通過多目標跟蹤(multi-target tracking,即MOT)功能,實現檢測框的跟蹤和ID分配。
Node對應package名為'mono2d_body_detection',同時指定了Node的參數:
- "ai_msg_pub_topic_name":發布包含人手檢測框信息的AI感知結果的topic名為"/hobot_mono2d_body_detection"
(2)人手關鍵點檢測
人手關鍵點檢測算法Node訂閱Hobot Sensor發布的圖像消息和人體檢測和跟蹤算法示例發布的包含人手框信息的AI msg,利用BPU處理器進行AI推理,發布包含人手關鍵點信息的AI msg。
Node對應package名為'hand_lmk_detection',同時指定了Node的參數:
- "ai_msg_sub_topic_name": 訂閱包含人手檢測框信息的topic名為"/hobot_mono2d_body_detection"
- "ai_msg_pub_topic_name":發布包含人手關鍵點信息的的AI感知結果topic名為"/hobot_hand_lmk_detection"
(3)手勢識別
手勢識別算法Node訂閱人手關鍵點檢測算法示例發布的包含人手框、人手關鍵點信息的AI msg,利用BPU處理器進行AI推理,發布包含手勢信息的AI msg。
Node對應package名為'hand_gesture_detection',同時指定了Node的參數:
- "ai_msg_sub_topic_name": 訂閱包含人手關鍵點信息的topic名為"/hobot_hand_lmk_detection"
- "ai_msg_pub_topic_name":發布包含手勢信息的的AI感知結果topic名為"/hobot_hand_gesture_detection"
手勢識別算法支持識別的手勢類別,發布的AI msg中對應的手勢結果數值如下:
| 手勢類別 | 手勢結果數值 |
| 無手勢 | 0 |
| ThumbUp/豎起大拇指 | 2 |
| Victory/“V”手勢 | 3 |
| Mute/“噓”手勢 | 4 |
| Palm/手掌 | 5 |
| Okay/OK手勢 | 11 |
| ThumbLeft/大拇指向左 | 12 |
| ThumbRight /大拇指向右 | 13 |
| Awesome/666手勢 | 14 |
- 交互
手勢控制策略Node訂閱手勢識別算法示例發布的包含手勢信息的AI msg,根據手勢類型發布前進、后退、左轉、右轉的控制消息,實現控制機器人運動。
Node發布的運動控制消息為ROS2中定義的消息,topic為“/cmd_vel”,消息類型為“geometry_msgs/msg/Twist”。
Node對應package名為'gesture_control',同時指定了Node的參數:
- "ai_msg_sub_topic_name": 訂閱包含手勢信息的topic名為"/hobot_hand_gesture_detection"
- "twist_pub_topic_name":發布運動控制指令消息的topic名為"/cmd_vel"
- "activate_wakeup_gesture": 喚醒手勢開關,值為0表示不啟用喚醒手勢。一般在人較多,環境復雜的場景,通過啟用喚醒手勢避免誤觸發手勢控制功能。
- "track_serial_lost_num_thr": 人手連續消失幀數閾值,值為100,表示當用于控制的人手連續消失100幀之后會重新選擇控制手
- "move_step": 平移運動的步長(速度),0.5表示移動速度為0.5m/s,值越大速度越快
- "rotate_step": 旋轉運動的步長(速度),0.5表示旋轉速度為0.5r/s,值越大速度越快
手勢控制策略選擇做出上述4種控制手勢(詳細的手勢控制說明詳見3.2章節)的人手作為唯一的控制手,通過此控制手實現對機器人的控制。
如果有多個人手同時做手勢,選擇人手檢測框寬度最大的手作為控制手。
已有控制手的情況下,其他的手做控制手勢都無效。
Node輸出的log中tracking_sta關鍵字表示控制手的狀態,0表示未找到控制手,1表示已有控制手,2表示控制手消失。
Node啟動后,未找到控制手的情況下,即沒有做出手勢,輸出log中tracking_sta值為0。
當有人手做出手勢時,找到控制手,輸出log中tracking_sta值為1,同時通過track_id關鍵字輸出人手的ID,gesture輸出當前做出的手勢結果數值。
只有當控制手消失,即連續track_serial_lost_num_thr幀(配置為100幀,對于輸出頻率為30fps的F37攝像頭,大約為3.3秒)未檢測到人手,判斷控制手消失,開始重新選擇控制手。控制手消失時輸出log中tracking_sta值為2。
如果需要啟用喚醒手勢避免誤觸發,喚醒手勢使用方法詳見手勢控制策略的代碼倉庫。
- 控制
機器人運動控制Node訂閱手勢控制策略Node發布的topic為“/cmd_vel”的控制消息,根據控制協議,通過USB總線向機器人下位機發布運動控制指令。
對于不同類型的機器人,控制協議不同,對應于不同的運動控制Node。
本文使用的是本末雙足機器人,對應的運動控制Node啟動方法為ros2 run diablo_sdk ros_bridge_example。此Node單獨啟動,不在啟動腳本中。
5.3 App的系統設計
根據5.1和5.2章節的介紹,已經知道了機器人手勢控制App啟動了哪些Node,這些Node的功能,Node之間的關系,以及使用這些Node如何實現通過手勢控制機器人的目標。下面進行理論總結,介紹此App的系統設計。
對于一個復雜的機器人系統,一般在機器人上配置上位機和下位機兩種處理器。
機器人上位機的計算能力較強,執行復雜的機器人上層應用,同時能夠最大程度屏蔽不同類型機器人的底層差異。
機器人下位機一般使用低成本的MCU處理器,對機器人本體上的各類傳感器和硬件進行數據采集/控制。
手勢控制App由兩部分組成,分別為機器人和PC端,其中機器人部分又分為上位機和下位機。詳細組成如下圖:
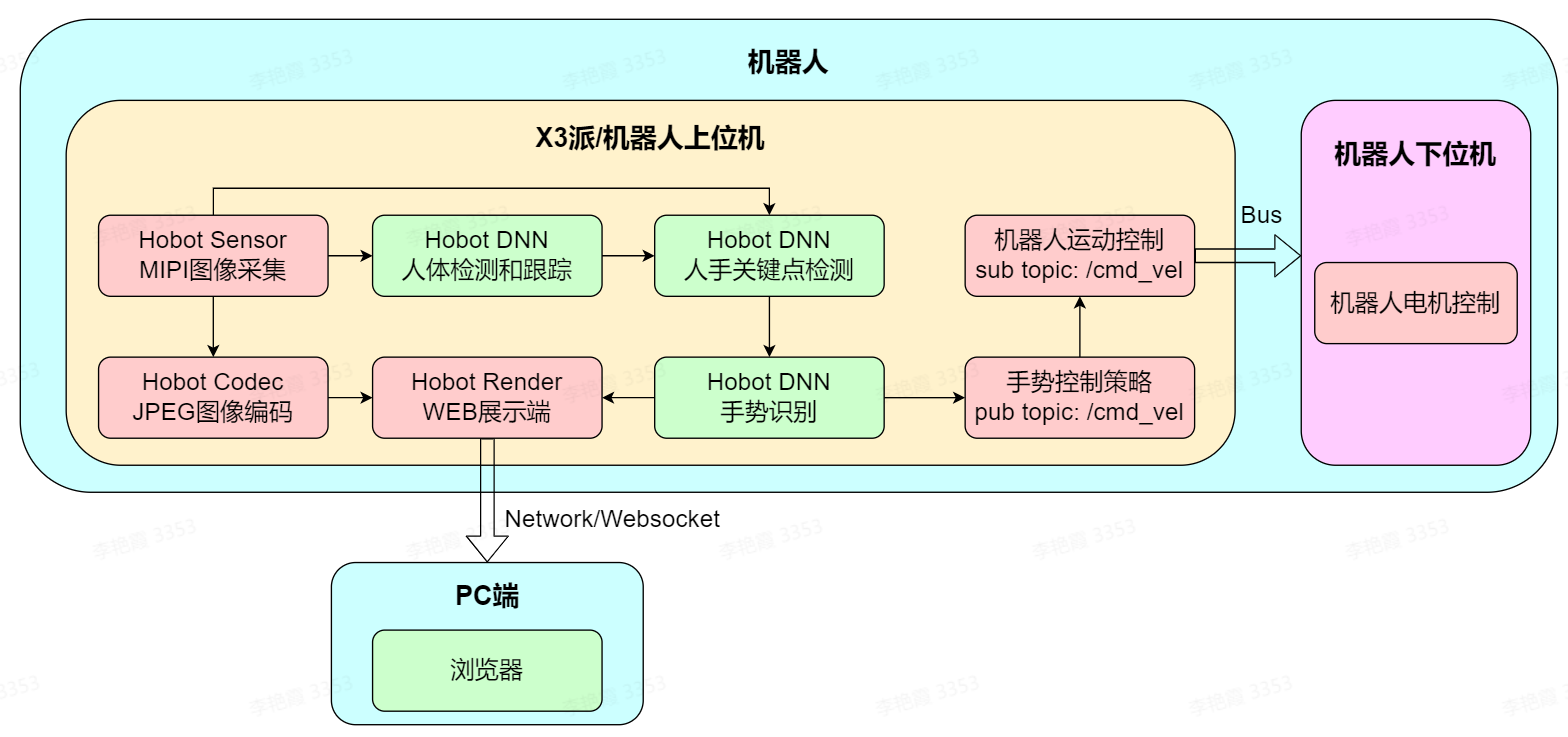
機器人上位機為X3派,運行著多個ROS2 Node,除了5.2章節介紹的傳感、感知、交互和控制功能,還有JPEG圖像編碼和WEB展示功能,將攝像頭發布的圖片編碼壓縮,以及將手勢識別算法發布的AI數據序列化后使用websocket協議發布,實現跨設備在PC端渲染展示和調試。
機器人下位機屬于機器人本體的一部分,詳細說明略。
從App的系統設計圖中可以看出,搭載了X3派和HHP的機器人,利用芯片的AI加速能力和HHP中豐富的算法、機器人開發組件,可以實現快速開發智能機器人應用的目標。
6 FAQ
6.1 如何復現App效果?
復現App效果涉及到兩部分:
(1)機器人手勢控制App
參考第2章準備工作,在X3派上安裝HHP。
(2)本末雙足機器人和機器人運動控制package
獲取方法詳見產品信息:https://developer.horizon.ai/forumDetail/94246984227025410
除了本末雙足機器人,X3派和HHP還適配了小R科技的麥輪小車,也可以使用小R小車直接體驗App效果。
6.2 沒有機器人的情況下可以體驗App效果嗎?
可以體驗。
在沒有機器人的情況下,可以使用此App控制gazebo仿真環境下的虛擬機器人運動。
6.3 如何將App適配到自己的機器人上?
本文以本末雙足機器人為例介紹手勢控制App的效果,App本身不依賴于任何形態的機器人,App發布的運動控制消息為ROS2中定義的消息(topic為“/cmd_vel”,消息類型為“geometry_msgs/msg/Twist”,具體說明參考第5章的原理分析)。
如下圖,可以將App的組成劃分成紅色和藍色虛線框兩個部分:
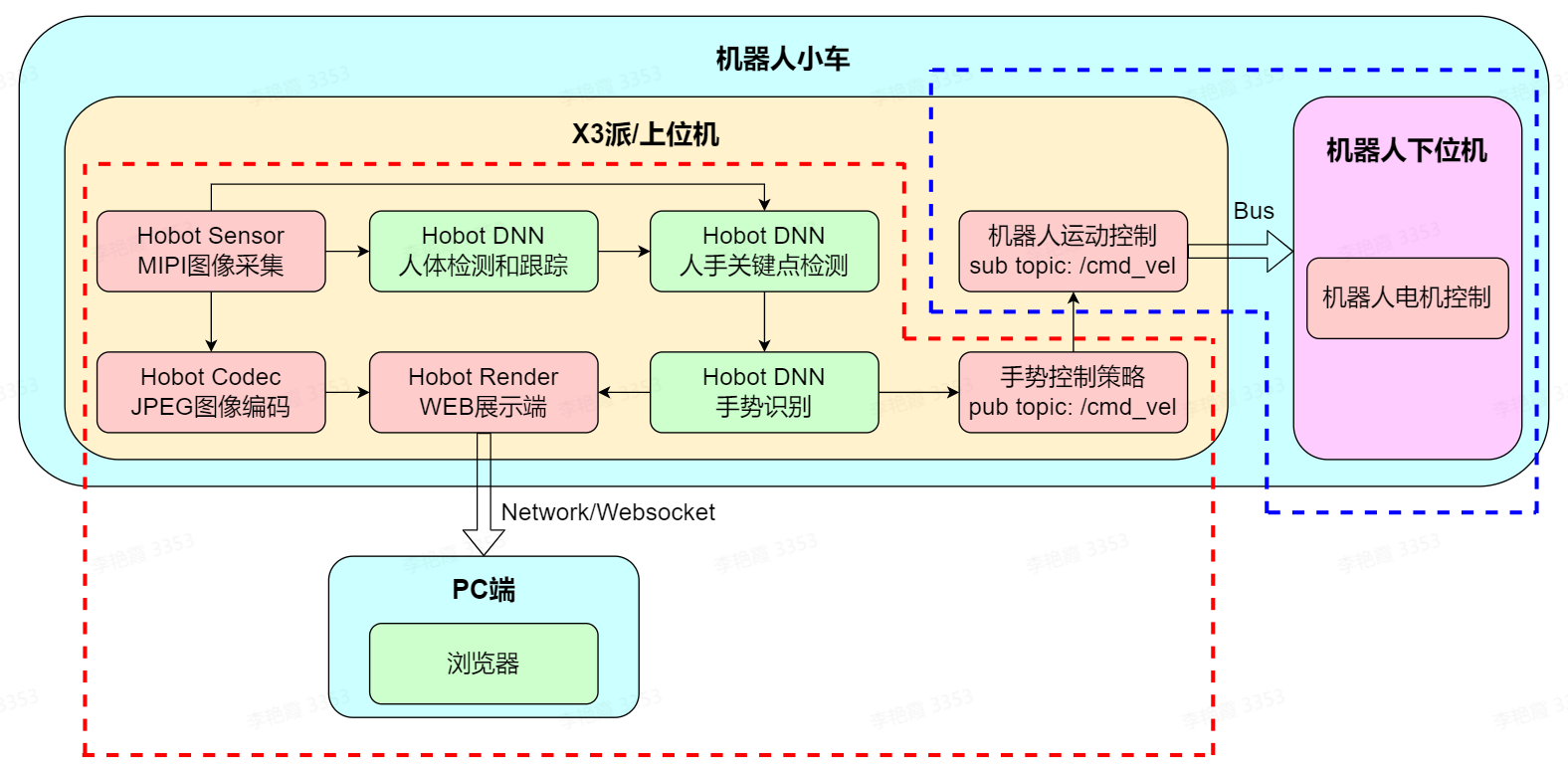
(1)紅色虛線框部分
這部分功能不依賴于機器人,即可以直接移植到任意形態的機器人上。
移植方法為將X3派安裝在機器人上,按照第2章節的準備工作,在X3派上安裝攝像頭傳感器和HHP。
(2)藍色虛線框部分
這部分功能依賴于機器人,需要針對性的適配。根據機器人的狀態不同,對應不同的適配方法。
狀態1,原先機器人上有上位機和下位機,如原先使用樹莓派或者Jetson Nano作為上位機,并且上位機上有機器人運動控制Node。需要在X3派上重新編譯機器人運動控制Node。
狀態2,原先機器人上只有下位機。需要開發機器人運動控制Node后(開發參考components/xrrobot · develop · HHP / app / xr_robot · GitLab (horizon.ai)),在X3派上編譯機器人運動控制Node。
6.4 App支持哪些攝像頭?
App對于攝像頭類型沒有要求,地平線機器人平臺支持MIPI和USB兩類攝像頭。
對于MIPI攝像頭,支持F37和GC4663兩種型號。
6.5 是否可以重新定義手勢對應的功能?
可以。
App中手勢和控制功能對應關系詳見第1章的功能介紹,目前只用到了4種控制手勢,5.2章節介紹了手勢識別算法支持的8種手勢類別,可以對手勢控制策略Node進行二次開發,重新定義手勢和對應的控制功能,如通過OK手勢控制四足機器人站立。
6.6 如何調整機器人的運動速度?
修改App啟動腳本hobot_gesture_control.launch.py中手勢控制策略gesture_control Node中的參數,可以控制機器人的平移和旋轉速度:
# 啟動手勢交互pkg Node( package='gesture_control', executable='gesture_control', output='screen', parameters=[ {"ai_msg_sub_topic_name": "/hobot_hand_gesture_detection"}, {"twist_pub_topic_name": "/cmd_vel"}, {"activate_wakeup_gesture": 0}, {"track_serial_lost_num_thr": 100}, {"move_step": 0.5}, {"rotate_step": 0.5} ], arguments=['--ros-args', '--log-level', 'info'] )
參數說明詳見5.2.2.8章節。
6.7 可以開發一個python的Node擴展App功能嗎?
可以。
ROS2支持跨設備、跨平臺、跨語言,TogetherROS完全兼容ROS2 Foxy版本,因此也支持這些特性。
例如在X3派的40PIN上安裝了LED燈,當機器人處于運動狀態時,LED燈被點亮。
用戶可以使用python開發一個ROS Node,訂閱手勢控制策略Node發布的topic為“/cmd_vel”的消息,檢查消息中的控制指令是否為啟動運動指令(值是否為非0),如果有非0值,表示是啟動運動,點亮LED燈,否則點滅LED燈。
使用python開發完Node后,直接在X3派上編譯并運行。
6.8 如何開發一個自己的算法Node擴展App功能?
HHP提供的Hobot DNNshe'u'qsheuq簡化板端AI模型推理與部署,釋放BPU算力,降低AI使用門檻。同時內置了常用的檢測、分類和分割算法的模型后處理,幫助用戶快速在X3派上集成部署自己的算法。
本文轉自地平線開發者社區
原作者:zhuk
原鏈接:https://developer.horizon.ai/forumDetail/98129540173361326
-
人機交互
+關注
關注
12文章
1200瀏覽量
55320 -
人工智能
+關注
關注
1791文章
46858瀏覽量
237552
發布評論請先 登錄
相關推薦
塔革特官方教學第一期:元器件及其庫相關操作。
智駕科技企業地平線登陸港交所
第五屆長沙·中國1024程序員節開幕
中國自動駕駛第一股的地平線機器人正式上市
兆易創新亮相2024地平線地瓜機器人開發者日
地平線助力鑒智機器人多款中階方案斬獲定點合作

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
TOSUN同星 第一期開發者訓練營圓滿落幕

地平線正式開源Sparse4D算法
集成電路學習與實訓平臺配置方案-高職院校第一期建設
集成電路學習與實訓平臺配置方案-本科院校第一期建設

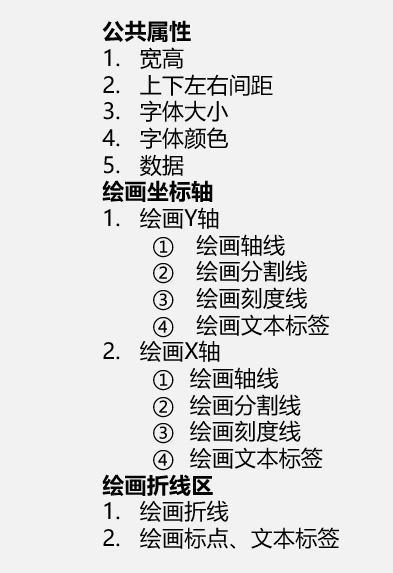
【開發者說】開發案例:使用canvas實現圖表系列之折線圖






 工商網監
工商網監
評論