") 【IoT畢設(shè).1】esp8266+機(jī)智云AIoT+豬舍監(jiān)測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
【IoT畢設(shè).1】esp8266+機(jī)智云AIoT+豬舍監(jiān)測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
1.1研究背景及意義
隨著我國(guó)經(jīng)濟(jì)社會(huì)的發(fā)展,人們對(duì)高品質(zhì)肉類(lèi)消費(fèi)需求快速增長(zhǎng),因此我國(guó)的生豬養(yǎng)殖業(yè)迎來(lái)了產(chǎn)業(yè)升級(jí),規(guī)模化、集約化、工廠化的養(yǎng)殖模式成為當(dāng)下主流。大型養(yǎng)殖場(chǎng)擁有自動(dòng)化環(huán)境控制設(shè)備,但大部分中小養(yǎng)殖場(chǎng)由于缺乏升級(jí)改造的資金和技術(shù),仍采用傳統(tǒng)養(yǎng)殖模式,豬舍環(huán)境和豬只狀態(tài)的監(jiān)測(cè)與控制相對(duì)落后,制約了我國(guó)農(nóng)業(yè)現(xiàn)代化的進(jìn)程。
本文結(jié)合物聯(lián)網(wǎng)、人工智能技術(shù),設(shè)計(jì)了一套集成度高、功能完善、方便易用的豬舍監(jiān)測(cè)系統(tǒng),研究?jī)?nèi)容包括以下方面:
首先結(jié)合系統(tǒng)需求,設(shè)計(jì)了服務(wù)器、微處理器、物聯(lián)網(wǎng)云平臺(tái)以及手機(jī)APP四者結(jié)合的方案,設(shè)計(jì)了系統(tǒng)功能,搭建了系統(tǒng)硬件終端。然后進(jìn)行終端程序設(shè)計(jì),該終端能夠監(jiān)測(cè)豬舍內(nèi)光照強(qiáng)度、溫濕度、氨氣濃度、火焰、雨滴以及人體感應(yīng)數(shù)據(jù);通過(guò)LCD顯示屏對(duì)各數(shù)據(jù)進(jìn)行顯示;設(shè)計(jì)了自動(dòng)和手動(dòng)兩種控制模式,控制電氣化設(shè)備運(yùn)轉(zhuǎn),維持豬舍環(huán)境穩(wěn)定。
其次結(jié)合ESP8266WIFI模塊以及機(jī)智云Aiot開(kāi)發(fā)平臺(tái)實(shí)現(xiàn)數(shù)據(jù)通信;結(jié)合極光推送平臺(tái),通過(guò)短信、郵箱對(duì)監(jiān)測(cè)到火焰以及行人時(shí)進(jìn)行推送報(bào)警。再次基于機(jī)智云SDK設(shè)計(jì)了手機(jī)APP,飼養(yǎng)員通過(guò)該APP,能夠了解豬舍環(huán)境以及豬只信息;切換工作模式;遠(yuǎn)程控制豬舍內(nèi)設(shè)備運(yùn)轉(zhuǎn)。
最后研究了基于計(jì)算機(jī)視覺(jué)的豬只檢測(cè)算法,利用YOLOv4算法實(shí)現(xiàn)了對(duì)舍內(nèi)豬只的檢測(cè),結(jié)合卡爾曼濾波和匈牙利匹配方法實(shí)現(xiàn)了對(duì)豬只軌跡的準(zhǔn)確跟蹤,進(jìn)一步結(jié)合分割算法實(shí)現(xiàn)了豬只的個(gè)體分割。最終輸出豬只數(shù)量、運(yùn)動(dòng)軌跡、分割掩碼,部分文本結(jié)果通過(guò)云平臺(tái)實(shí)現(xiàn)數(shù)據(jù)傳輸,為對(duì)豬只進(jìn)一步健康分析奠定了技術(shù)基礎(chǔ)。
針對(duì)豬只健康生長(zhǎng)以及降低飼養(yǎng)員勞動(dòng)強(qiáng)度的需求進(jìn)行分析梳理,結(jié)合物聯(lián)網(wǎng)技術(shù)以及計(jì)算機(jī)視覺(jué)技術(shù),本文提出并設(shè)計(jì)了一種基于云平臺(tái)的豬舍監(jiān)測(cè)系統(tǒng)。本系統(tǒng)利用WIFI技術(shù)實(shí)現(xiàn)通信,不僅滿足用戶需求,而且具有開(kāi)發(fā)流程簡(jiǎn)單、周期短、集成度高的優(yōu)點(diǎn)。不但可以用于生豬養(yǎng)殖,還能夠遷移到各種“智慧”養(yǎng)殖場(chǎng)所,其意義有如下幾點(diǎn):
(1)保障豬舍環(huán)境穩(wěn)定。本系統(tǒng)可以實(shí)時(shí)監(jiān)測(cè)豬舍內(nèi)環(huán)境參數(shù),根據(jù)監(jiān)測(cè)的環(huán)境數(shù)據(jù)自動(dòng)控制電氣化設(shè)備動(dòng)作。穩(wěn)定的豬舍環(huán)境可以降低環(huán)境因素對(duì)豬只帶來(lái)的不利影響,促進(jìn)豬只健康生長(zhǎng)。
(2)獲取豬只數(shù)據(jù)。本系統(tǒng)通過(guò)計(jì)算機(jī)視覺(jué)技術(shù)對(duì)豬只進(jìn)行監(jiān)測(cè),獲取豬舍內(nèi)豬只數(shù)量,跟蹤豬只運(yùn)動(dòng)軌跡,得到豬只像素點(diǎn)比重,為畜牧業(yè)物聯(lián)網(wǎng)提供數(shù)據(jù)支持,在生豬養(yǎng)殖的應(yīng)用場(chǎng)景非常廣闊。
(3)降低飼養(yǎng)員工作強(qiáng)度。本系統(tǒng)通過(guò)手機(jī)APP可以讓飼養(yǎng)員實(shí)時(shí)了解豬舍環(huán)境數(shù)據(jù)以及豬只信息,遠(yuǎn)程控制電氣化設(shè)備。這不僅能讓飼養(yǎng)員及時(shí)對(duì)豬舍情況進(jìn)行處理,還能極大降低飼養(yǎng)員工作強(qiáng)度。
因此豬舍監(jiān)測(cè)是實(shí)現(xiàn)生豬養(yǎng)殖規(guī)模化、信息化發(fā)展的重要步驟,研究基于物聯(lián)網(wǎng)云平臺(tái)的豬舍監(jiān)測(cè)系統(tǒng)非常有意義。
1.2.1 基于物聯(lián)網(wǎng)的豬舍環(huán)境監(jiān)測(cè)系統(tǒng)
在國(guó)內(nèi),主要以單片機(jī)或者PLC為核心,利用傳感器技術(shù)對(duì)豬舍環(huán)境信息進(jìn)行采集,通過(guò)單片機(jī)處理數(shù)據(jù),由單片機(jī)自動(dòng)控制執(zhí)行模塊動(dòng)作;或者通過(guò)CAN總線傳輸至上位機(jī),在上位機(jī)設(shè)計(jì)監(jiān)控界面,實(shí)現(xiàn)數(shù)據(jù)可視化以及手動(dòng)控制;或者通過(guò)無(wú)線傳輸至云服務(wù)器,將Web端或者手機(jī)APP端作為用戶端來(lái)實(shí)現(xiàn)數(shù)據(jù)顯示以及手動(dòng)控制。以上設(shè)計(jì)都考慮在聯(lián)網(wǎng)狀態(tài)下的完全自動(dòng)控制或者完全手動(dòng)控制,功能較為單一。
本文采用自動(dòng)模式結(jié)合手動(dòng)模式的方式,在聯(lián)網(wǎng)狀態(tài)下,單片機(jī)系統(tǒng)可以切換工作模式,實(shí)現(xiàn)完全自主控制,也可以通過(guò)手機(jī)APP實(shí)現(xiàn)手動(dòng)控制;在不聯(lián)網(wǎng)狀態(tài)下,單片機(jī)系統(tǒng)切換為自動(dòng)模式,也是一個(gè)獨(dú)立工作的系統(tǒng)。
1.2.2 基于計(jì)算機(jī)視覺(jué)的豬只檢測(cè)算法
P.Ahrendt等采用攝像頭俯拍豬舍的方法對(duì)豬舍進(jìn)行實(shí)時(shí)監(jiān)控[18],將采集的原圖制作為豬只個(gè)體的對(duì)應(yīng)圖,建立原圖與對(duì)應(yīng)圖相關(guān)聯(lián)的高斯模型,再將背景以及前景區(qū)域區(qū)分,從而實(shí)現(xiàn)豬只的識(shí)別與定位。Mkashiha等提出一種自動(dòng)識(shí)別標(biāo)記豬只的算法[19],將各豬只背部用帶顏色的顏料標(biāo)記,對(duì)豬舍上方俯拍圖進(jìn)行二值化處理。通過(guò)橢圓擬合的辦法對(duì)二值圖中的豬只定位,同時(shí)利用傅里葉描述子間的歐式距離法將豬只背部的標(biāo)記圖案與樣本圖案實(shí)現(xiàn)相似度匹配,從而實(shí)現(xiàn)豬只個(gè)體識(shí)別。
JLee等使用深度相機(jī)對(duì)各豬只不同行為模式進(jìn)行視頻采集,然后對(duì)不同行為進(jìn)行特征提取,采用支持向量機(jī)的方法判斷是否存在攻擊行為,并進(jìn)行分類(lèi)[20]。PrawitBuayai等針對(duì)豬只邊界提出了一種基于積分圖像自適應(yīng)閾值分割的豬只邊界檢測(cè)方法[21],在復(fù)雜的豬舍環(huán)境下對(duì)豬只進(jìn)行檢測(cè)。ParkHyeon等基于深度學(xué)習(xí),提供了一種可以快速監(jiān)測(cè)豬舍內(nèi)多個(gè)設(shè)備異常情況的機(jī)制[22]。
通過(guò)分析學(xué)習(xí)RNN特征,推導(dǎo)了最優(yōu)遞歸神經(jīng)網(wǎng)絡(luò)環(huán)境,提高預(yù)測(cè)模型的準(zhǔn)確性。在國(guó)內(nèi)的豬只檢測(cè)與跟蹤領(lǐng)域,肖德琴等為了快速準(zhǔn)確的檢測(cè)豬只的各種運(yùn)動(dòng)信息,在基于顏色和輪廓特征相結(jié)合的多豬只目標(biāo)分割基礎(chǔ)上加入了基于最小化代價(jià)函數(shù)的橢圓擬合和最短距離匹配的目標(biāo)跟蹤,加入了運(yùn)動(dòng)位移、速度、加速度、角速度四個(gè)運(yùn)動(dòng)信息[23]。該算法對(duì)多種顏色的豬只都有良好識(shí)別效果,并且能夠分割粘連豬只。
1.3.1 研究?jī)?nèi)容
對(duì)基于云平臺(tái)的豬舍監(jiān)測(cè)系統(tǒng)研究,該系統(tǒng)的主要功能是通過(guò)傳感器技術(shù)對(duì)豬舍內(nèi)各環(huán)境因子進(jìn)行監(jiān)測(cè);通過(guò)計(jì)算機(jī)視覺(jué)技術(shù)對(duì)豬只個(gè)體進(jìn)行檢測(cè);通過(guò)自動(dòng)控制或者遠(yuǎn)程手動(dòng)控制的方式控制豬舍內(nèi)各電氣化設(shè)備運(yùn)行,從而使豬舍環(huán)境保持穩(wěn)定。該系統(tǒng)有利于豬只的生長(zhǎng)發(fā)育,能夠有效降低豬只的患病概率,減輕飼養(yǎng)員的體力勞動(dòng)。
主要研究?jī)?nèi)容如下所示:
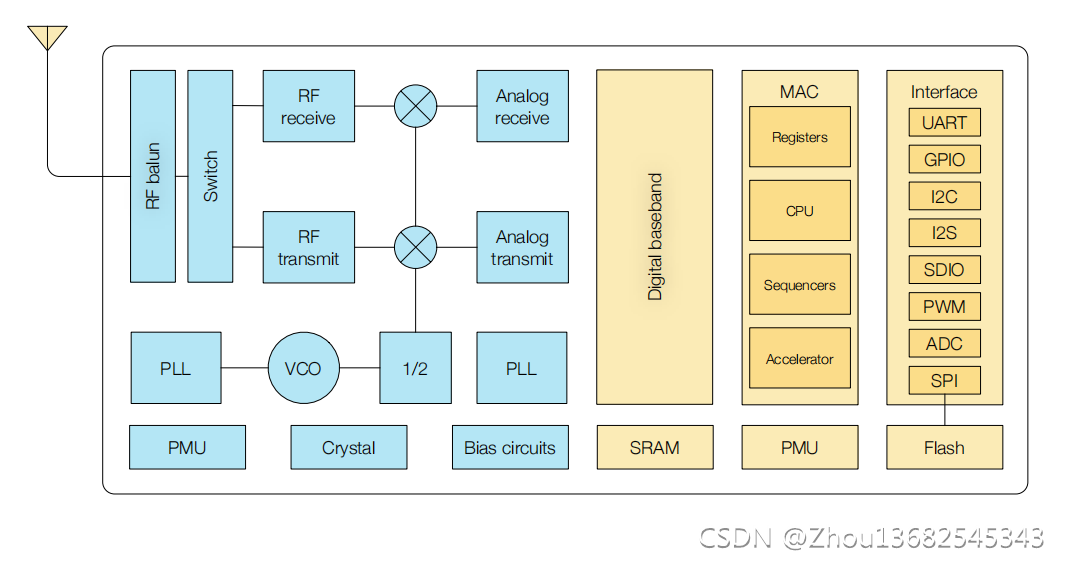
(1) 下位機(jī)監(jiān)測(cè)系統(tǒng)硬件設(shè)計(jì)。系統(tǒng)硬件部分主要由微處理器、電源模塊、傳感器檢測(cè)模塊、控制模塊、數(shù)據(jù)傳輸模塊、顯示模塊以及報(bào)警模塊組成。系統(tǒng)終端以微處理器為核心,統(tǒng)籌各模塊工作運(yùn)行。
(2) 下位機(jī)監(jiān)測(cè)系統(tǒng)軟件設(shè)計(jì)。系統(tǒng)軟件基于C語(yǔ)言和STM32運(yùn)行環(huán)境下編程,設(shè)計(jì)了自動(dòng)模式以及手動(dòng)模式兩種工作模式。自動(dòng)模式可以將環(huán)境數(shù)據(jù)與設(shè)置的閾值進(jìn)行比較,從而自動(dòng)控制電氣化設(shè)備的運(yùn)轉(zhuǎn);手動(dòng)模式接收Android客戶端的控制指令,進(jìn)行相應(yīng)控制。
(3) 云平臺(tái)設(shè)計(jì)。基于機(jī)智云物聯(lián)網(wǎng)平臺(tái),通過(guò)API(應(yīng)用程序編程接口)實(shí)現(xiàn)與云端的數(shù)據(jù)通信;結(jié)合極光推送,設(shè)置監(jiān)測(cè)到火焰時(shí)短信推送、監(jiān)測(cè)到行人時(shí)郵箱推送。
(4) 手機(jī)APP設(shè)計(jì)。基于機(jī)智云的SDK設(shè)計(jì)出一款結(jié)合實(shí)際應(yīng)用場(chǎng)景并且滿足系統(tǒng)要求的手機(jī)APP。該APP可以切換系統(tǒng)工作模式,在自動(dòng)模式下,顯示監(jiān)測(cè)數(shù)據(jù)以及電氣化設(shè)備狀態(tài);在手動(dòng)模式下,可以手動(dòng)控制電氣化設(shè)備的開(kāi)啟、關(guān)閉。
(5) 豬只檢測(cè)算法設(shè)計(jì)。利用計(jì)算機(jī)視覺(jué)技術(shù)對(duì)豬只個(gè)體實(shí)現(xiàn)檢測(cè),輸出豬只檢測(cè)
信息,并將結(jié)果通過(guò)串口發(fā)送至單片機(jī),最終在手機(jī)APP上顯示。
系統(tǒng)總體方案設(shè)計(jì)內(nèi)容點(diǎn)擊下載:
【IoT畢設(shè).2】STM32F407單片機(jī)+機(jī)智云AIoT+豬舍監(jiān)測(cè)與系統(tǒng)總體方案設(shè)計(jì)
-
AIoT
+關(guān)注
關(guān)注
8文章
1392瀏覽量
30578
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
《機(jī)智云入門(mén)必備》手把手教你燒錄GAgent固件

esp32和esp8266代碼共用嗎
esp8266和esp32區(qū)別是什么
esp8266不燒錄可以使用嗎
esp8266wifi模塊怎么連接手機(jī)
機(jī)智云ESP8266開(kāi)發(fā)板RGB彩燈控件
STM32F103 + ESP8266與機(jī)智云開(kāi)發(fā)常見(jiàn)問(wèn)題集錦:入門(mén)者必讀!
ESP8266 IoT_Demo行不通的原因?
ESP8266網(wǎng)絡(luò)天氣時(shí)鐘OLED顯示
國(guó)產(chǎn)低成本W(wǎng)i-Fi SoC解決方案芯片ESP8266與ESP8285對(duì)比差異
確定ESP8266固件下載成功的方法
使用Wi-Fi ESP8266方案模組接入云平臺(tái)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論