 霧區智能行車誘導系統微波雷達與紅外對技術應用對比
霧區智能行車誘導系統微波雷達與紅外對技術應用對比
高速公路事故高發的險危路段對道路總體運營安全影響顯著,較多事故發生在“黑點”即團霧、暗冰、橫風等易發路段與急彎、長下坡等設計標準偏低路段。特別是暴雨、大霧、霧霾等低能見度環境易發路段對高速公路車輛通行安全影響極大,容易發生追尾、側翻、撞壁等事故。秋冬季節,我國高速公路連環追尾多發生在團霧易發路段。
高速霧區智能行車誘導系統是一款專門針對霧區道路交通環境設計的智能霧區引導系統,是一款基于創新的霧區道路交通安全保障理論研制的霧區道路交通安全保障系統,成套技術中涵蓋了道路交通環境下的團霧檢測、團霧所致道路交通事故機理及防范、低能見度道路交通的主動引導技術、霧區車輛間隔距離檢測與控制、防撞預警技術等多項創新技術和產品。同時還解決了外場設備間的通訊問題、外場設備的供電問題等應用難題。
其中,多采用紅外對射與微波雷達技術進行車輛檢測預警與車輛尾跡跟蹤輔助。與微波雷達技術相比,紅外對射技術具有如下問題:
1、誤報率高
(1)產品本身質量問題。國內目前市場上主流的紅外對射產品檔次不一樣,質量也不一樣。選擇一款性價比比較高的紅外對射非常有必要,建議大家不要一味的圖便宜,往往最后反而得不償失。當然,并不是高檔的產品其品質就一定沒有問題,電子產品都會有次品,也會有質量出現問題的時候,但是高檔的產品售后服務等都做得比較到位,萬一有問題,用戶也可以得到相應的服務,產品用起來也放心、安心。
(2)產品設計、安裝問題。高速霧區智能行車誘導系統是一個相對比較復雜,專業知識、技術要求較高的系統。紅外對射的安裝一般要求紅外對射安裝上去之后必須堅固牢實,沒有移位或搖晃,以利于安裝和設防、減少誤報,否則大風吹過來,造成對光不準的問題。
(3)現場環境干擾問題。紅外對射易受溫度、光線等環境干擾,一旦遇到沙塵、下雨等惡劣天氣時,其探測器衰減程度非常大,誤報率飆升。
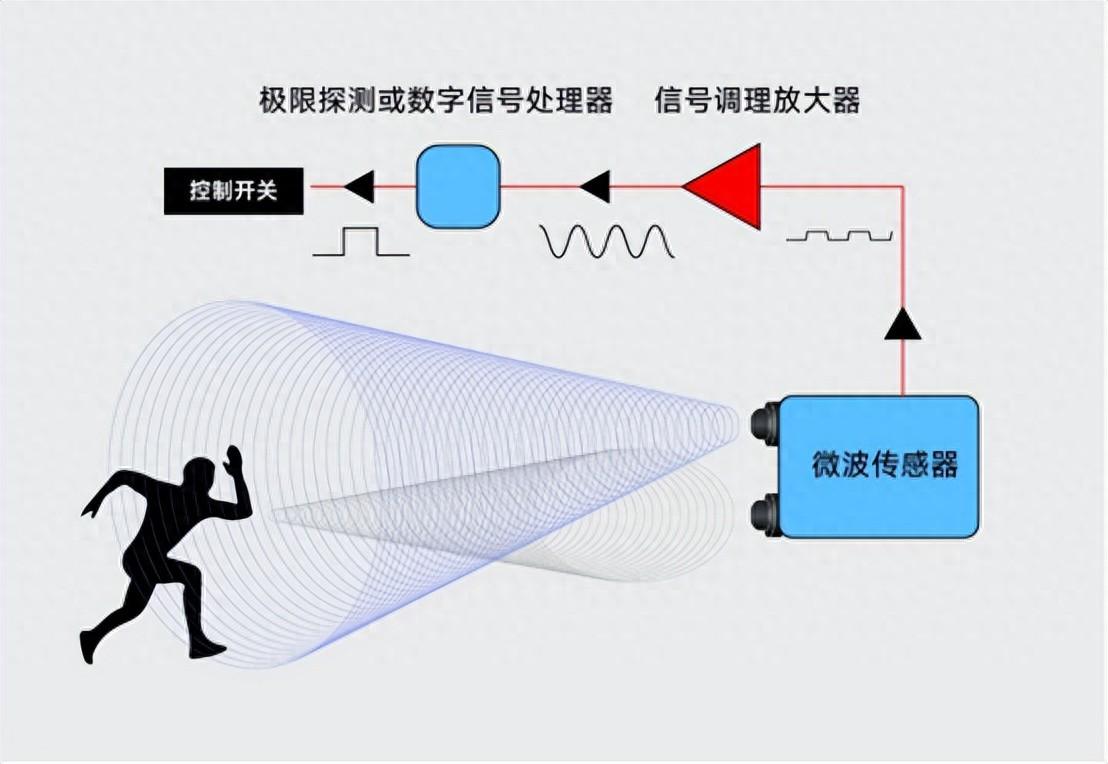
微波雷達是基于K波段的線性調頻機制,對動態目標進行快速的捕捉、觸發,尤其適用于霧霾、夜間、雨天等能見度低的環境下目標的識別和檢測,且雷達波傳輸不依賴任何介質作為傳導,速度等同于光速,具有較強的抗環境干擾能力,相較于紅外對射技術,監測更準確穩定。
2、探測范圍有限
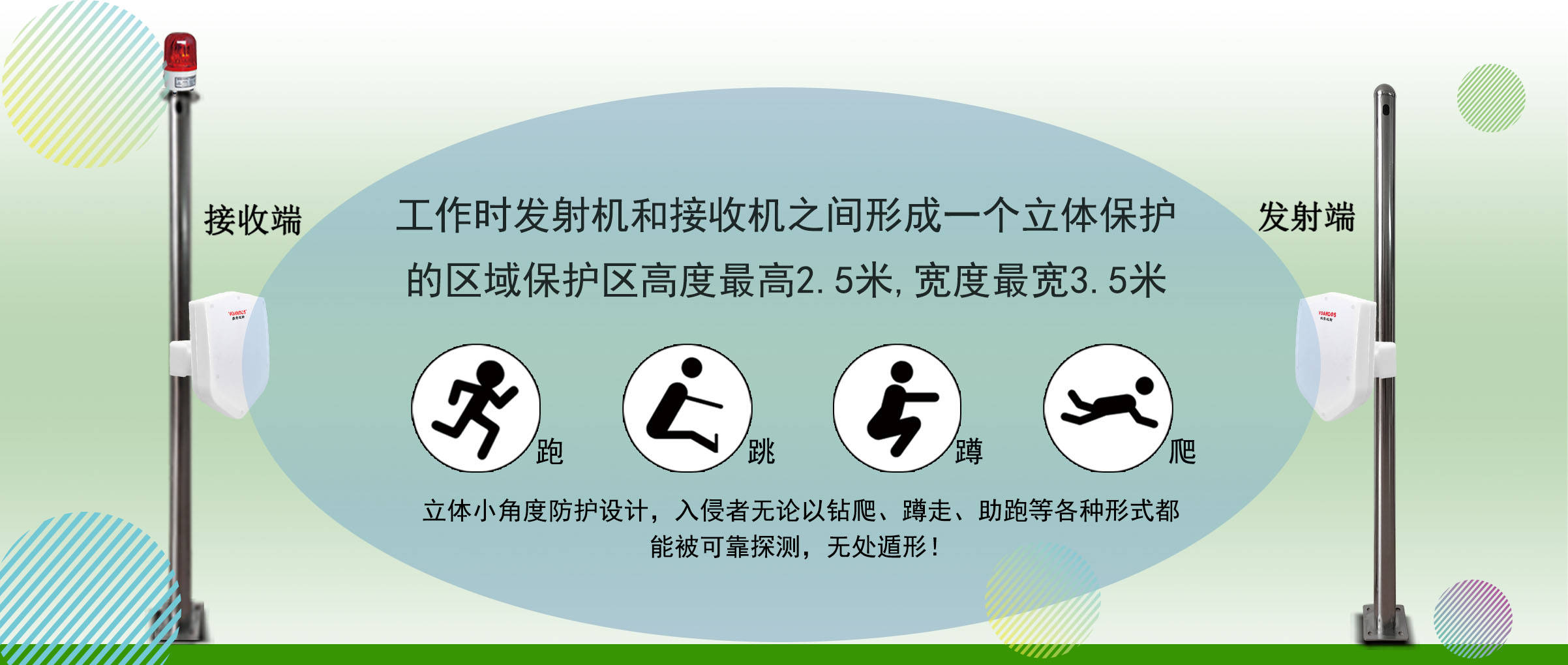
紅外對射(主動式紅外)探測器又可以被稱為光束遮斷感應探測器,一組設備一邊發射紅外光束,另一邊接收數據,一旦光束被某物體遮斷就會發出報警。這種直線傳播特性這就決定了每一組相對的霧燈設備必須安裝一對紅外對射探測器,才能保證每組霧燈的正常工作。而微波雷達探測器,具備較寬的探測角度與范圍,一個微波雷達探測器可覆蓋多個甚至多組霧燈設備。

根據JT/T 1032-2016標準要求:防追尾警示模式中的車輛檢測模塊最大檢測距離不小于20m,檢測準確率不低于95%。巍泰技術(武漢)有限公司霧區車輛檢測雷達WTR-562可實現對霧天、雨雪天、夜間等低能見度環境中動態目標車輛進行的快速捕捉和警示燈光觸發;無須敷設電纜、無須破壞道路及路面側裝結構、無須增加附加立桿或橫桿,安裝施工方便;連接方式簡單,可直接與霧燈預警系統連接;檢測距離可達20m,檢測精準、零誤報;不受風、光照、溫度、濃霧變化等外界環境因素的干擾,并可穿透煙、灰塵和霧等準確識別跟蹤目標車輛,幫助實現霧區車輛防追尾預警。
-
雷達
+關注
關注
50文章
2903瀏覽量
117331
發布評論請先 登錄
相關推薦
汽車雷達回波發生器的技術原理和應用場景
微波雷達水位在線監測 微波雷達水速在線監測
2024年微波雷達傳感器革命:精確測量,智能未來

微波雷達探測器的工作原理、特點及應用領域
對射式微波雷達探測器的工作原理及性能對比分析
巍泰技術基于 TurMass? 通信技術的道路交通安全雷達風險防控解決方案
毫米波雷達人體感應和紅外人體感應哪個好

巍泰技術毫米波雷達如何助力道路車輛預警?靜態目標檢測是關鍵

WTR-563 霧區車輛檢測雷達
車輛檢測雷達、TurMass通信技術與霧天行車智能誘導:科技引領安全行車新時代
霧天行車誘導系統中低功耗車輛檢測雷達的關鍵機制






 工商網監
工商網監
評論