 C-V2X仿真測試之虛擬場景設計
C-V2X仿真測試之虛擬場景設計
V2X(Vehicle-to-Everything)即車對“萬物”,通過現代通信與網絡技術,實現車與外界的信息交換共享(實時路況、道路信息、行人信息等一系列交通信息),從而提高駕駛安全性、降低交通擁堵、提高交通效率。
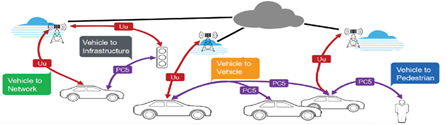
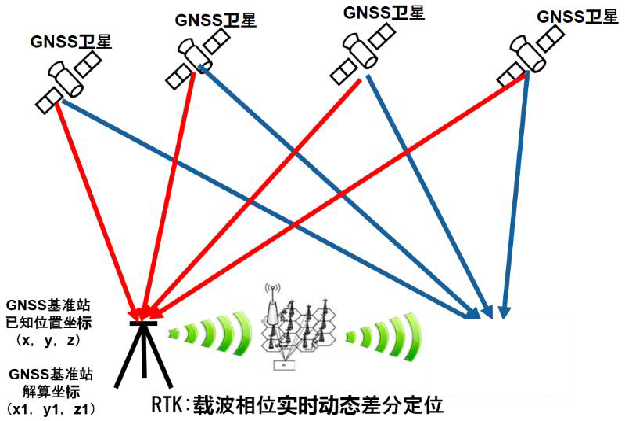
圖1 V2X組織架構圖
V2X主要包含V2V (Vehicle-to-Vehicle), V2I (Vehicle-to-Infrastructure), V2P (Vehicle-to-Pedestrian)和V2N (Vehicle-to-Network)。搭配V2X系統的車輛可以獲取實時交通環境信息并對其分析,從而更加合理地規劃行駛路徑,在一定程度上輔助自動駕駛。
搭配V2X系統的車輛可以獲取實時交通信息并對其分析,更加合理地規劃行駛路徑,在一定程度上輔助自動駕駛。
本文基于《CSAE 53-2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準》對V2X虛擬仿真場景設計進行探索,設計思路如下圖所示。
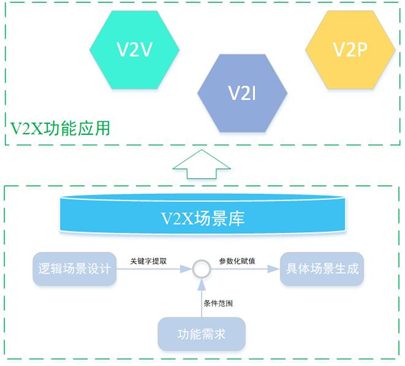
圖2 V2X虛擬仿真場景設計流程
1、V2V場景設計
V2V (Vehicle-to-Vehicle)即車載單元之間通信。在進行該類功能的虛擬場景設計時,主要考慮車輛的駕駛行為及各車輛之間的相對運動關系,提取關鍵元素設計邏輯場景,再結合具體的功能需求對邏輯場景中的元素進行參數化賦值,生成具體的測試場景。
下面以前向碰撞預警(FCW)、交叉路口碰撞預警(ICW)為例詳細介紹V2V虛擬場景設計。
1.1前向碰撞預警(FCW)
(1)功能定義
前向碰撞預警(Forward Collision Warning)是指,主車(HV)在車道上行駛,與在正前方同一車道的遠車(RV)存在追尾碰撞危險時,FCW應用將對HV駕駛員進行預警,防止或減輕追尾事故帶來的傷害。
(2)場景設計
根據功能定義描述可知,當主車(HV)與同車道遠車(RV)之間的相對距離小于閾值時FCW功能觸發。因此可設計以下4種邏輯場景:
場景一:HV以速度V0保持勻速行駛,RV在HV前方同車道距離X1處以初速度V1、減速度a減速行駛,當HV與RV之間的相對距離小于S(S
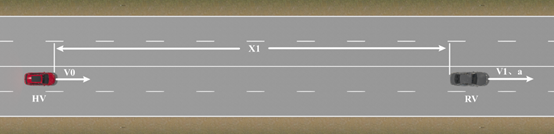
圖3 FCW場景一示意圖
場景二:HV以速度V0保持勻速行駛,RV在HV前方同車道距離X1處以速度V1(V1
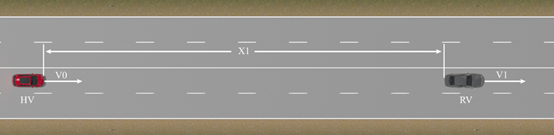
圖4 FCW場景二示意圖
場景三:HV以速度V0保持勻速行駛,RV在HV前方相鄰相鄰車道距離X1(X1<=S)處以速度V1行駛并突然變道至HV所在車道,此時FCW功能觸發,FCW應用通過HMI對HV駕駛員進行預警;
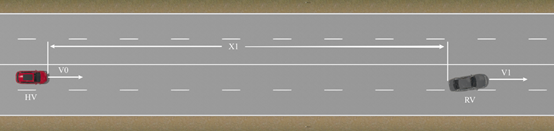
圖5 FCW場景三示意圖
場景四(逆向測試場景):HV以速度V0保持勻速行駛,RV在HV前方相鄰車道距離X1(X1<=S)處以速度V1(V1<=V0)保持勻速行駛,FCW功能未觸發;
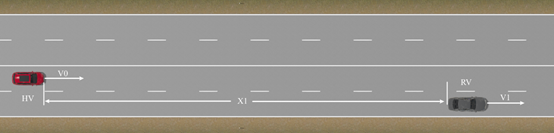
圖6 FCW場景四示意圖
結合需求文檔,對以上邏輯場景元素HV行駛速度V0、RV行駛速度V1、RV減速度a及車道類型(直道、彎道)進行參數化賦值,生成具體的FCW虛擬測試場景。
1.2交叉路口碰撞預警ICW
(1)功能定義
交叉路口碰撞預警(Intersection Collision Warning)是指,主車(HV)駛向交叉路口,與側向行駛的遠車(RV)存在碰撞危險時,ICW應用將對HV駕駛員進行預警。
(2)場景設計
根據功能定義描述可知,HV駛向交叉路口并與任意一輛駛向同一路口的RV存在碰撞危險時(TTI及DTI小于閾值)ICW功能觸發。因此可設計以下2種邏輯場景:
場景一:HV以恒定速度V0駛向前方交叉路口(角度α),RV在 HV左側以恒定速度V1駛向路口并與HV相交于P點,HV到達P點的時間和距離分別為HV_TTI、HV_DTI ,RV到達P點的時間和距離分別為RV_TTI、RV_DTI;當以上TTI和DTI滿足條件時(存在碰撞危險)ICW功能觸發,ICW應用通過HMI對HV駕駛員進行預警;
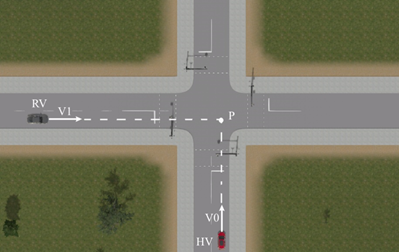
圖7 ICW場景一示意圖
場景二:HV以恒定速度V0駛向前方交叉路口(角度α),RV在 HV右側以恒定速度V1駛向路口(與HV無交叉點),HV到達P點的時間和距離分別為HV_TTI、HV_DTI,RV到達P點的時間和距離分別為RV_TTI、RV_DTI;當以上TTI和DTI滿足條件時(存在碰撞危險)ICW功能觸發,ICW應用通過HMI對HV駕駛員進行預警;
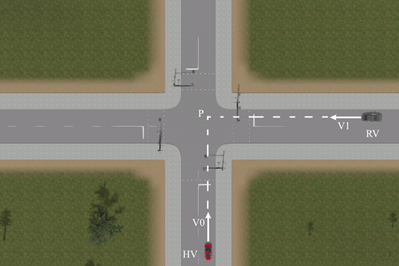
圖8 ICW場景二示意圖
結合需求文檔,對以上邏輯場景元素HV_TTI、HV_DTI、RV_TTI、RV_DTI及交叉路口角度α進行參數化賦值,生成具體的ICW虛擬測試場景。
2、V2I場景設計
V2I (Vehicle-to- Infrastructure)即車載單元與路側單元通信。在進行該類功能的虛擬場景設計時,主要考慮交通環境信息(交通標志、交通事件、交通燈及道路信息),提取關鍵元素設計邏輯場景,再結合具體的功能需求對邏輯場景中的元素進行參數化設置,生成具體的測試場景。
下面以車內標牌(IVS)、闖紅燈預警(RLVW)為例詳細介紹V2I虛擬場景設計。
2.1車內標牌(IVS)
(1)功能定義
車內標牌(In-Vehicle Signage)是指,當裝載車載單元(OBU)的HV收到由路側單元(RSU)發送的道路數據以及交通標牌信息,IVS應用將給予駕駛員相應的交通標牌提示,保證車輛的安全行駛。
(2)場景設計
根據功能定義描述可知,當HV駛入前方標識牌有效范圍區域時,IVS功能觸發。因此可設計邏輯場景:
場景一:HV以速度V0保持勻速行駛,前方有潮汐車道,當HV在標牌有效時間內駛入標牌有效區域時,IVS功能觸發,IVS應用通過HMI將標牌信息顯示給HV駕駛員;

圖9 IVS場景一示意圖
結合需求文檔,對以上邏輯場景元素HV行駛速度V0、標牌類型(潮汐車道、限速等)進行參數化賦值,生成具體的IVS虛擬測試場景。
2.2闖紅燈預警(RLVW)
(1)功能定義
闖紅燈預警(Red Light Violation Warning)是指,主車(HV)經過有信號控制的交叉口(車道),車輛存在不按信號燈規定或指示行駛的風險時,RLVW應用對駕駛員進行預警。
(2)場景設計
根據功能定義描述可知,當HV駛向前方有信號燈控制的交叉口(車道)且存在闖紅燈風險時,RLVW功能觸發。因此可設計邏輯場景:
場景一:HV在左轉(直行)車道上以恒定速度V0駛向有信號燈控制的交叉口,當前左轉(直行)車道信號燈狀態為紅燈,且紅燈剩余時間大于HV到達路口停止線的時間;HV存在闖紅燈危險,此時RLVW功能觸發,RLVW應用通過HMI對HV駕駛員進行預警;

圖10 RLVW場景一示意圖
結合需求文檔,對以上邏輯場景元素HV行駛速度V0、HV所在車道及車道匹配的信號燈狀態(燈色、時間)進行參數化賦值,生成具體的RLVW虛擬測試場景。
3、V2P場景設計
V2P (Vehicle to Pedestrians)即車載單元與行人設備通信。在進行該類功能的虛擬場景設計時,主要考慮弱勢交通參與者與車輛之間的相對運動關系,提取關鍵元素設計邏輯場景,再結合具體的功能需求對邏輯場景中的元素進行參數化設置,生成具體的測試場景。
下面以弱勢交通參與者碰撞預警(VRUCW)為例詳細介紹V2P虛擬場景設計。
3.1弱勢交通參與者碰撞預警(VRUCW)
(1)功能定義
弱勢交通參與者碰撞預警(Vulnerable Road User Collision Warning)是指,HV在行駛中,與周邊行人(P,Pedestrian;含義拓展為廣義上的弱勢交通參與者,包括行人、自行車、電動自行車等)存在碰撞危險時,VRUCW應用將對車輛駕駛員進行預警,也可對行人進行預警。
(2)場景設計
根據功能定義描述可知,當HV與周邊行人存在碰撞危險時,VRUCW功能觸發。因此可設計邏輯場景:
場景一:HV以速度V0保持勻速行駛,側前方有行人橫穿馬路,行駛速度為V1;HV與P存在碰撞危險,VRUCW功能觸發,VRUCW應用通過HMI對HV駕駛員進行預警;

圖11 VRUCW場景一示意圖
場景二:HV在倒車時,側后方有行人橫穿馬路,行駛速度為V1;HV與P存在碰撞危險,VRUCW功能觸發,VRUCW應用通過HMI對HV駕駛員進行預警;
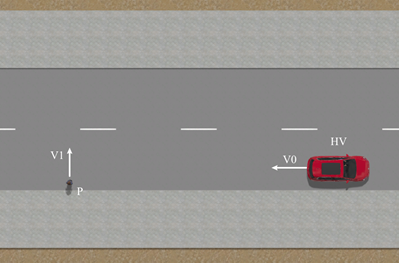
圖12 VRUCW場景二示意圖
場景三(逆向測試場景):HV以速度V0保持勻速行駛,側前方有行人與HV同向行駛,行駛速度為V1;HV與P不存在碰撞危險,VRUCW功能未觸發;

圖13 VRUCW場景三示意圖
結合需求文檔,對以上邏輯場景元素HV行駛速度V0、弱勢交通參與者類型P、行駛速度V1進行參數化賦值,生成具體的VRUCW虛擬測試場景。
4、總結
本文舉例詳細介紹了CSAE 53-2020(第一階段)中V2V、V2I及V2P虛擬仿真場景的設計思路及方法,對于CSAE 157-2020(第二階段)中的功能應用,場景搭建思路及方法與之類似,以協作式車輛編隊管理(CPM)為例,搭建的虛擬場景如下:
視頻(請聯系北匯信息獲取)
協作式車輛編隊管理(CPM)
本文中V2X虛擬仿真場景設計是基于仿真軟件DYNA4實現的,DYNA4支持場景建模、傳感器建模及動力學建模等功能,大家有這方面需求的話可與我們聯系。
北匯信息是德國Vector公司、德國Rohde&Schwarz(簡稱R&S)公司、德國IPG公司、德國PikeTec公司、美國Perforce公司等國際知名企業的官方合作伙伴,同時也是IMT-2020(5G)推進組蜂窩車聯(C-V2X)工作組成員,我們致力與在V2X領域積極開展LTE-V2X和5G-V2X的測試驗證技術研究等工作,積極推動中國V2X的產業落地,為客戶提供V2X成套測試系統及服務。
參考文獻
CSAE 53-2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準(第一階段)
CSAE 157-2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準(第二階段)
文中部分內容參考于Vector。
-
V2X
+關注
關注
25文章
209瀏覽量
43465
發布評論請先 登錄
相關推薦
基于V2X和自動駕駛HIL聯調的仿真測試系統開發

是德科技出席2024 C-V2X“四跨”(上海)先導應用實踐活動
C642x-TPS62110(x 2)和TPS73018測試報告

設計仿真 | 基于VTD的V2X仿真應用

設計仿真 | 基于VTD的智能大燈仿真測試方案
智駕仿真測試實戰之自動泊車HiL仿真測試

設計仿真 基于VTD的AR-HUD仿真測試解決方案

C-V2X安全證書:保障車路云系統通信安全的關鍵
數字證書與數字簽名:汽車C-V2X通信安全的基石

車聯萬物C-V2X與背后的連接組件
Samtec應用科普 | C-V2X技術在汽車領域的應用


讓聰明的車連接智慧的路,C-V2X開啟智慧出行生活






 工商網監
工商網監
評論