 ADAS DV&PV試驗測試臺架的方案分享
ADAS DV&PV試驗測試臺架的方案分享
為了在當下高速發展的自動駕駛中始終保持產品核心競爭力,各廠商皆迫切持續改進現有產品并迭代新興技術,而快速的產品迭代并量產容易導致產品問題頻出,進而引發現場故障、高昂售后、產品召回、品牌危機等問題。
設計驗證試驗(DV-Design Verification)及產品驗證試驗(PV-Product Validation)是一種有效的工程手段來盡量消除潛在失效模式出現在未來產品中,并確保產品的功能、性能、可靠性、穩定性符合產品設計預期及客戶需求;而高效的DV&PV自動化試驗測試臺架方案將有助于測試開展、異常捕捉、故障檢查及問題分析,持續縮短產品開發、改進及驗證周期,以確保產品交付時間及品質。
1、DV&PV試驗需求
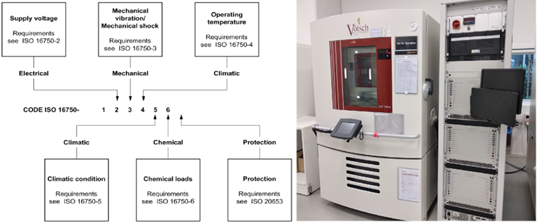
DV&PV試驗測試要求根據產品特性及試驗標準(ISO-16750),在機械、電器、環境、化學等試驗條件下開展多個被測件(DUT)的環境可靠性試驗及電氣性能試驗;自動化試驗測試臺架則為上述試驗的開展提供全生命周期、高穩定性的電氣模擬、實時狀態監控、過程數據記錄及測試報告生成等功能。
2、自動化試驗測試臺架技術方案
2.1自動化試驗測試臺架系統框架
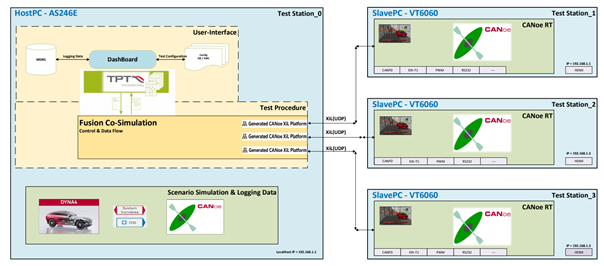
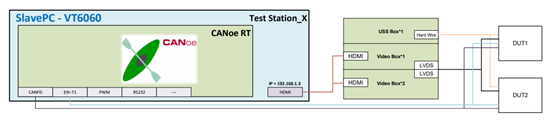
DV&PV自動化試驗測試臺架(LTT-Life Time Tester)主要由用戶交互界面GUI、測試策略管理軟件TPT及分布式CANoe RT從機構成;測試策略管理軟件TPT、車輛及場景仿真軟件DYNA4、RT系統配置工具CANoe皆運行在Host PC中,其中用戶交互界面GUI負責測試系統上位機的信息顯示及測試操作功能,而分布式CANoe RT從機實現對VT system設備的調用和網絡通訊的仿真;TPT作為測試策略管理軟件,則完成對Dashboard GUI及CANoe RT從機資源及接口的統一管理,并通過其FUSION Co-Simulation機制完成多DUT的并行測試。
2.2測試策略管理軟件TPT
TPT支持汽車電子主流的工具鏈來覆蓋產品開發的整個V模式(MiL、SiL、PiL、HiL、ViL)下所有的測試階段,并以圖形化建立狀態機形式的測試用例,復用度高而無需更換測試工具。其強大的Fusion Platform使用戶可以輕松創建包含不同組件的仿真環境,以實現對多節點交互控制及聯合仿真;仿真節點類型涵蓋了CANoe Node、 dSPACE HiL Node、INCA Client Node、Speedgoat Node及Custom Node DLL等。
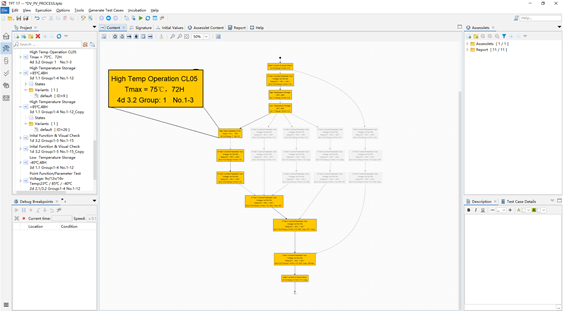
》狀態機定義測試驗證運行模式及試驗流程:
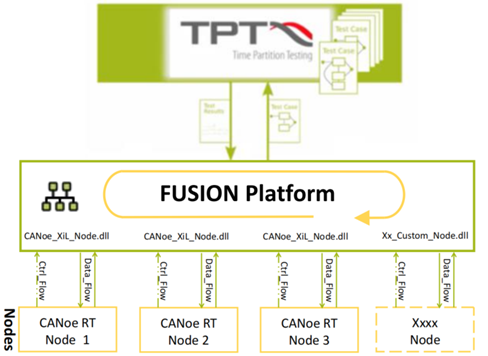
》FUSION Platform多節點支持與Multi CANoe接合以實現多個ADAS控制器的并行測試:
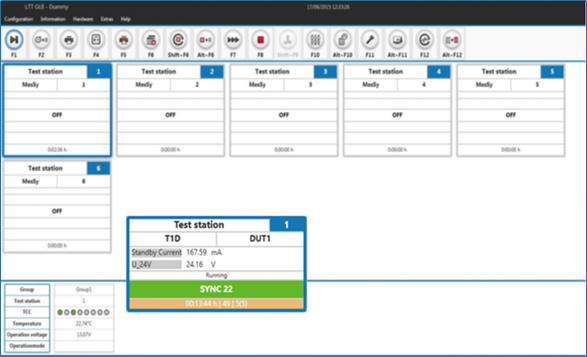
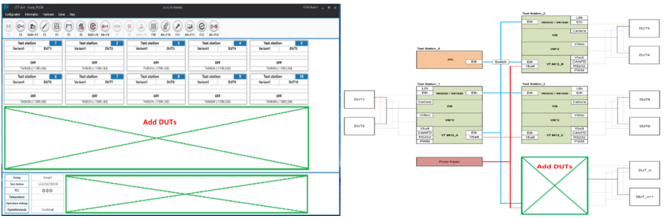
》獨立測試平臺Dashboard定制開發適應于試驗監控的GUI,其具備運行模式配置(F11)、工作模式切換(F1/F8)、DUT通道配置(F7)、運行狀態顯示、異常提示、故障碼查詢、數據庫更新及測試報告生成等功能:
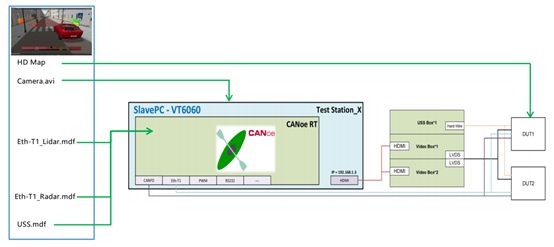
2.3 LTT系統硬件框架
ADAS控制器的LIDAR、RADAR、USS等傳感器信號及CAN FD、Ethernet等通信接口都采用Vector VT system對應功能板卡進行適配,外設激勵信號最終通過各端口I/O注入到DUT中。
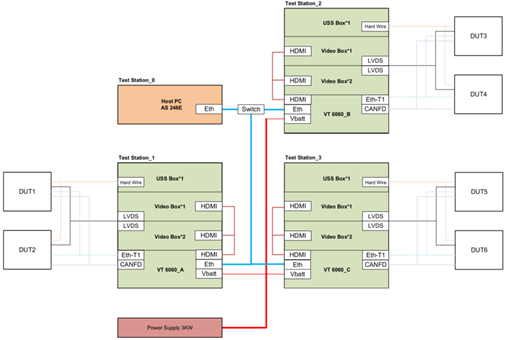
可選用CANoe RT實時從機板卡VT6060、車載以太網通訊板卡VT6306、CAN FD通訊板卡VT6104A、通用數字I/O板卡VT2848等功能模塊進行差異化配置以適應ADAS控制的所有外部傳感器及網絡通信需求。
2.4 ADAS傳感器數據采集及回灌
DV&PV試驗中ADAS控制器需要其工作在特定的場景以驗證其所有外設接口、信號處理電路及SOC算力耐久穩定性;而在Vector DYNA4中可自由創建車輛及外部環境仿真模型以驗證自動駕駛的特定應用場景,并通過配置Camera、LIDAR、RADAR、USS等參數以生成與場景關聯的各種傳感器數據;最后通過ASAM OSI及MDF的方式輸出場景數據,以便進行分布式多DUT的數據回灌。
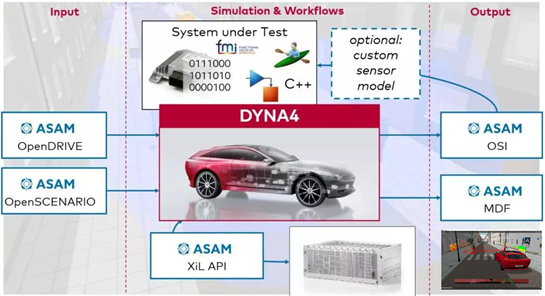
通過多從機中CANoe RT及視頻回播可將攜帶指定仿真場景的OSI及MDF格式的數據回灌入ADAS控制器中,以滿足在特定工作模式及試驗場景下功能、性能、可靠性及穩定性的驗證。
2.5 LTT方案拓展性
》擴展多DUT(6+)并行測試
實施DV&PV試驗中,需靈活配置1~6個DUT及多于6個DUT進行同時驗證,而Dashboard GUI及分布式CANoe RT框架在系統軟、硬件框架上皆可進行彈性配置,以滿足多樣化的測試驗證需求。
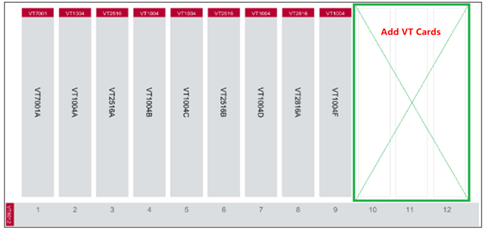
》擴展單DUT功能(VT板卡)
分布式CANoe RT從機采用Vector VT system方案,其中實時機VT6060可通過USB接口外掛VN1600&VN5000網絡設備,而VT8012機箱可插入VT各功能板卡(VT2848 Digital I/O Modules、VT2816 Analog I/O Modules、VT2004 Stimulation Modules、VT2832 Switch Matrix Module等),從而以增加各類型信號端口及模擬負載。
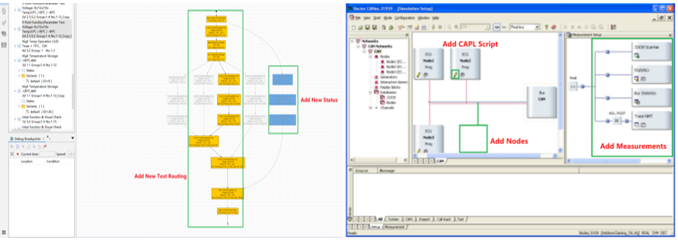
》擴展TPT狀態機模式&CANoe仿真程序
TPT狀態機模式可以支持用戶根據試驗需求進行自定義開發,自主添加測試工作模式及自由組合測試流程;同時CANoe仿真軟件支持仿真節點、CAPL程序的自適應開發,其測量分析功能便于功能測試及問題分析。
3、總結
本文簡要介紹了ADAS控制器在DV&PV試驗中自動化測試臺架(LTT)的技術方案,從系統軟、硬件方面說明技術方案的平臺性、實用性;整個方案采用全棧測試策略管理軟件TPT、車輛及環境場景仿真軟件DYNA4、測試仿真軟件CANoe及VT system硬件系統,保證了自動化測試臺架在DV&PV全生命周期驗證中的可靠性、穩定性及可擴展性,從而將試驗驗證重心放在ADAS產品本身中以加速迭代周期及品質提升。
參考文獻
1. ISO 16750-1:2018 Road vehicles-Environmental conditions and testing for electrical and electronic equipment
2. IEC 60068-1:2013 Environmental testing - Part 1: General and guidance
3. ADAS-HIL_System-Information.pdf
文中部分內容參考于Vector/PikeTec
-
adas
+關注
關注
309文章
2170瀏覽量
208536
發布評論請先 登錄
相關推薦
北美運營商AT&T認證的測試內容有哪些?

北美運營商AT&amp;amp;T認證的費用受哪些因素影響

onsemi LV/MV MOSFET 產品介紹 &amp;amp; 行業應用

基于 onsemi NCV78343 &amp;amp; NCV78964的汽車矩陣式大燈方案

電動汽車充電樁測試臺架的相關介紹

FS201資料(pcb &amp; DEMO &amp; 原理圖)
北美運營商AT&amp;amp;T認證入庫產品范圍名單相關

解讀北美運營商,AT&amp;amp;T的認證分類與認證內容分享
利爾達NB-IoT &amp;amp;Cat.1 產測應用指導

Open RAN的未來及其對AT&amp;T的意義

R&amp;S基于Analog Devices的技術打造無線電池管理系統生產測試解決方案

R&amp;S和Applus在EMC測試環境中完成eCall測試






 工商網監
工商網監
評論