") 1:8的自動(dòng)駕駛模型車,教學(xué)研發(fā)兩相宜
1:8的自動(dòng)駕駛模型車,教學(xué)研發(fā)兩相宜
隨著自動(dòng)駕駛技術(shù)的如火如荼發(fā)展,各種仿真、臺(tái)架和實(shí)際道路試驗(yàn)手段也都應(yīng)用在研發(fā)測(cè)試的各個(gè)階段。人才培養(yǎng)也成為企業(yè)發(fā)展的重要基石。為了幫助高校學(xué)生在學(xué)校就可以動(dòng)手進(jìn)行“真實(shí)”的操練,德國(guó)MdynamiX專門推出了MXcarkit開發(fā)套裝,為自動(dòng)駕駛仿真和測(cè)試搭建堅(jiān)實(shí)的階梯。
對(duì)于在ADAS/AD領(lǐng)域的學(xué)生來(lái)說(shuō),MXcarkit是快速入門的好幫手,能迅速觀測(cè)算法的結(jié)果。對(duì)于教學(xué)和研發(fā)來(lái)說(shuō),都是一個(gè)非常高效的工具。

MXcarkit的主要特點(diǎn)
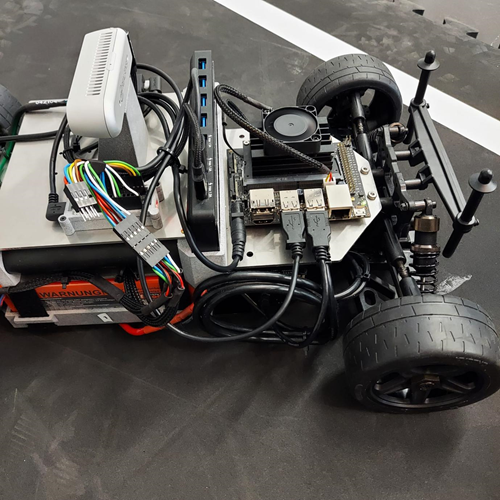
▲載體是一輛1:8的高質(zhì)量模型車,安裝了真實(shí)的傳感器、特制的電機(jī)控制器和一個(gè)實(shí)時(shí)計(jì)算機(jī),這樣能滿足自動(dòng)駕駛的相關(guān)要求。
▲基于功能強(qiáng)大的NVIDIA Jetson計(jì)算機(jī),可以訪問(wèn)所有搭載的傳感器和執(zhí)行器,實(shí)現(xiàn)車輛動(dòng)力學(xué)控制和面向機(jī)器人和人工智能AI的應(yīng)用。
▲實(shí)時(shí)計(jì)算機(jī)NVIDIA Jetson上安裝了ROS機(jī)器人操作系統(tǒng)。可以方便地對(duì)ADAS/AD應(yīng)用算法進(jìn)行處理和開發(fā),同時(shí)也能借助標(biāo)準(zhǔn)接口來(lái)集成更多的傳感器和執(zhí)行器。
▲易于調(diào)試和上手,自帶基礎(chǔ)軟件功能(如車道識(shí)別和車輛控制),可以方便地進(jìn)行駕駛操控的編程、進(jìn)一步的軟件開發(fā)和參數(shù)優(yōu)化。
▲MXcarkit還配備了WLAN模塊,可以進(jìn)行在線遠(yuǎn)程訪問(wèn)和數(shù)據(jù)評(píng)估。
▲MdynamiX還提供在線技術(shù)論壇來(lái)解答與MXcarkit相關(guān)的各種問(wèn)題。
自動(dòng)泊車APA的研究示例
在德國(guó)高校的自動(dòng)駕駛挑戰(zhàn)比賽中,有一個(gè)參賽組就是專注挑戰(zhàn)自動(dòng)泊車這個(gè)主題,關(guān)注車輛如何自動(dòng)識(shí)別泊車空間的標(biāo)記,規(guī)劃泊車位置,然后再生成地圖用于檢測(cè)這些泊車位是被占用或空閑。


MXcarkit模型車裝備與實(shí)際車輛相同的傳感器技術(shù),可以實(shí)現(xiàn)對(duì)泊車空間的探測(cè)。借助前置攝像頭采集的圖像,MXcarkit檢測(cè)到泊車位標(biāo)志線并把圖像坐標(biāo)系轉(zhuǎn)換成車輛坐標(biāo)系,再結(jié)合環(huán)境地圖,車輛就能自動(dòng)泊車。這樣可以同時(shí)探測(cè)到泊車過(guò)程中的動(dòng)靜態(tài)障礙,并檢測(cè)泊車空間是否可用。除了自行開發(fā)泊車空間檢測(cè)系統(tǒng)外,還可以在該系統(tǒng)上添加基于廣泛應(yīng)用的ROS代碼包的傳感器數(shù)據(jù)融合和SLAM(即時(shí)定位和地圖構(gòu)建)算法。
MXcarkit的優(yōu)勢(shì)非常明顯。預(yù)置成熟硬件和接口,自帶各種傳感器驅(qū)動(dòng)。這樣學(xué)生(工程師)可以100%關(guān)注最重要的任務(wù),比如檢測(cè)停車位,計(jì)算車輛到泊車位的位置等算法。甚至更高階的研究,比如基于軌跡規(guī)劃的完全自動(dòng)泊車,基于傳感器數(shù)據(jù)融合提升車輛里程估算,這些都可以基于MXcarkit展開。
MXcarkit自動(dòng)駕駛套裝
車輛平臺(tái):
▲高品質(zhì)1:8模型車
▲電機(jī)控制:FSESC 4.20
▲ECU和傳感器供電:2x 7.4V鋰離子電池 (25 Ah)
ECUs:
▲NVIDIA Jetson Nano (128 CUDA-Cores, 4 GB RAM and Wifi Module)
▲1x STM32 Nucleo:用于超聲波傳感器、RC接收器和可選車燈的數(shù)據(jù)采集和預(yù)處理。
▲FLIPSKY FSESC4.20
傳感器:
▲雙目攝像頭:Intel? RealSense? Depth Camera D435i with integrated IMU
▲超聲波傳感器:10x (帶自動(dòng)環(huán)境溫度補(bǔ)償)
▲RPLIDAR A3
▲2x IMU 6DOF
定制的安裝架:
▲NVIDIA Jetson Board
▲Lithium Polymer Powerpack
▲Steering Servo
▲Camera
▲STM32 Nucleo Board
▲Ultrasound Sensors
▲USB Hub
▲IMU
▲LIDAR
軟件:
▲機(jī)器人操作系統(tǒng)ROS
▲基礎(chǔ)傳感器的集成
▲電機(jī)控制
▲轉(zhuǎn)向控制
▲基于圖像處理和人工智能AI算法的路徑控制示例
附件:
▲Remote control
▲電池充電器
▲USB Hub
▲快速入門指南
-
自動(dòng)駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
95瀏覽量
14986
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

Waymo利用谷歌Gemini大模型,研發(fā)端到端自動(dòng)駕駛系統(tǒng)
智能駕駛與自動(dòng)駕駛的關(guān)系
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛的研發(fā)為無(wú)人駕駛的應(yīng)用鋪設(shè)了堅(jiān)實(shí)基石
智能駕駛大模型:有望顯著提升自動(dòng)駕駛系統(tǒng)的性能和魯棒性

未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
上海人工智能實(shí)驗(yàn)室發(fā)布自動(dòng)駕駛視頻生成模型GenAD
自動(dòng)駕駛已成現(xiàn)實(shí)?賽思時(shí)間同步服務(wù)器賦能北京市高級(jí)別自動(dòng)駕駛示范區(qū),為自動(dòng)駕駛提供中國(guó)方案

蘑菇車聯(lián)獲天津(西青)國(guó)家級(jí)車聯(lián)網(wǎng)先導(dǎo)區(qū)首張自動(dòng)駕駛測(cè)試牌照

華為自動(dòng)駕駛技術(shù)怎么樣?
LabVIEW開發(fā)自動(dòng)駕駛的雙目測(cè)距系統(tǒng)
自動(dòng)駕駛“十問(wèn)十答”






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論