") 面向ADAS/AD應(yīng)用,打造獨特的轉(zhuǎn)向手感
面向ADAS/AD應(yīng)用,打造獨特的轉(zhuǎn)向手感
隨著輔助駕駛和自動駕駛越來越受到主機(jī)廠的重視,轉(zhuǎn)向系統(tǒng)測試和驗證的要求也越來越高。無論是傳統(tǒng)轉(zhuǎn)向系統(tǒng)還是線控轉(zhuǎn)向系統(tǒng),轉(zhuǎn)向手感都至關(guān)重要。目前在汽車的開發(fā)階段,在經(jīng)典"自動駕駛"輔助或自動駕駛,或者手動駕駛到自動駕駛的過渡的過程中,由于原型車處于較晚的開發(fā)階段且資源非常有限及在虛擬開發(fā)過程中真實轉(zhuǎn)向手感的仿真質(zhì)量不足等問題,造成了在真實車輛中發(fā)現(xiàn)問題為時已晚的困境。同時故障排除又需要耗費大量時間和成本。因此,提前讓工程師和客戶體驗真實的轉(zhuǎn)向手感,有助于高效開發(fā)轉(zhuǎn)向系統(tǒng)和提高ADAS/AD的駕駛感受。
MXsteerHiL系統(tǒng)經(jīng)過多年的研究和開發(fā),可以提供車輛動力學(xué)和自動駕駛開發(fā)的轉(zhuǎn)向在環(huán)方案,可再現(xiàn)獨特的逼真轉(zhuǎn)向手感。通過提供了一個獨特的敏捷開發(fā)工具,可較早體驗真實的轉(zhuǎn)向手感。同時,在指導(dǎo)開發(fā)中,也可以實施和驗證特有的功能。作為一個模塊化系統(tǒng),MXsteerHiL不管是從HiL實驗室,還是高動態(tài)駕駛模擬器,都可評估和校準(zhǔn)在開發(fā)早期階段的轉(zhuǎn)向系統(tǒng)和ADAS / AD駕駛感受。

MXsteerHiL的主要特性:
▲對轉(zhuǎn)向和ADAS/AD系統(tǒng)進(jìn)行客觀和主觀的評估;
▲在靜態(tài)、動態(tài)駕駛模擬器和實驗室中廣泛使用;
▲高速和低頻范圍內(nèi)精確的方向盤轉(zhuǎn)矩控制;
▲可集成的轉(zhuǎn)向系統(tǒng)類型:C-EPS、P-EPS和 R-EPS以及新型的線控轉(zhuǎn)向;
▲可集成特定的 ECU模型和殘余總線仿真;
▲支持對簡化轉(zhuǎn)向系統(tǒng)和復(fù)雜轉(zhuǎn)向系統(tǒng)的建模;
▲支持自動化測試程序的能力搭建;
▲與常見的車輛動力學(xué)仿真、HiL系統(tǒng)和駕駛模擬器進(jìn)行集成;
▲與自動評估軟件MXeval和常用開發(fā)工具兼容。
MXsteerHiL 針對以下測試環(huán)境進(jìn)行的優(yōu)化和驗證:
手動駕駛:
▲在測試臺上進(jìn)行轉(zhuǎn)向回轉(zhuǎn)測試和HiL測試
▲靜態(tài)和動態(tài)駕駛模擬器上的駕駛員在環(huán)
▲主觀評價"真實"轉(zhuǎn)向手感
▲轉(zhuǎn)向功能的功能開發(fā)、測試和標(biāo)定
▲轉(zhuǎn)向特性
▲故障安全行為的無風(fēng)險測試
輔助和自動駕駛:
▲轉(zhuǎn)向在環(huán)/在各種臺架上集成HiL測試
▲靜態(tài)和動態(tài)駕駛模擬器上的駕駛員在環(huán)
▲通過橫向(邊緣和中心)指導(dǎo)對"真實"轉(zhuǎn)向手感進(jìn)行主觀評估
▲ADAS/AD功能的功能開發(fā)、測試和校準(zhǔn)
▲脫手測試
▲故障安全行為的無風(fēng)險測試
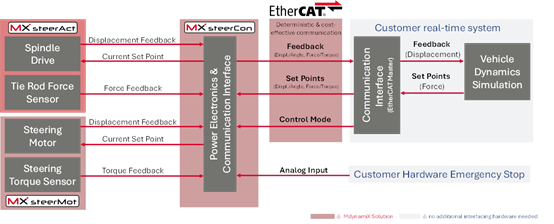
MXsteerHiL-軟硬件接口信息
MXsteerHiL智能的架構(gòu)可以方便地連接到客戶現(xiàn)有的實時HiL系統(tǒng)。
MXsteerHiL的模塊化設(shè)計
基于模塊化的MXsteerHiL系統(tǒng),可根據(jù)目標(biāo)需求單獨組裝更高效整體轉(zhuǎn)向測試臺。無論是在實驗室中緊湊型配置,還是在動態(tài)駕駛模擬器中進(jìn)行高性能測試,都可以量身定制相匹配的解決方案。總之,MXsteerHiL具有緊湊,功能強(qiáng)大,可隨時擴(kuò)展,簡單逼真的特性。
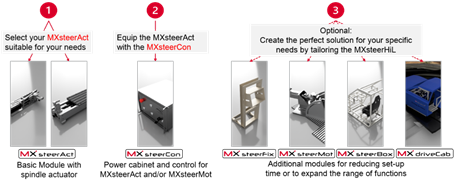
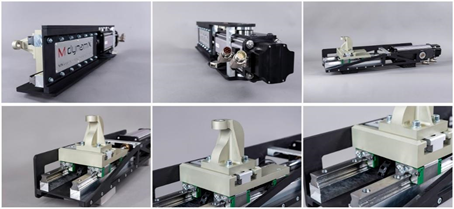
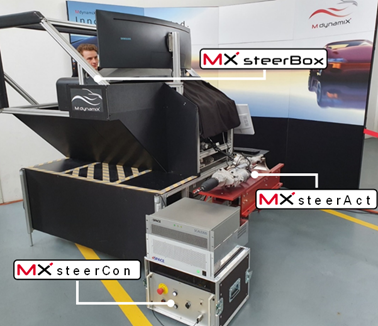
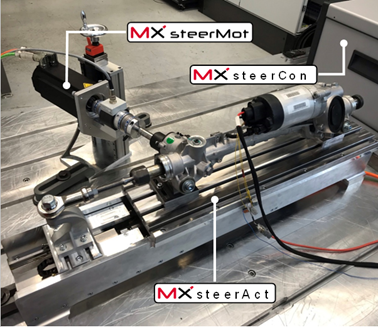
MXsteerAct—基礎(chǔ)模塊
MXsteerAct是MXsteerHiL最基礎(chǔ)硬件驅(qū)動模塊,也是整個系統(tǒng)的核心。它性能直接影響整個測試臺架的準(zhǔn)確性和可靠性。該模塊模擬輸入路面從輪胎反饋到轉(zhuǎn)向拉桿、系統(tǒng)的負(fù)載力,從而實現(xiàn)真實的轉(zhuǎn)向手感。
MXsteerMot-執(zhí)行電機(jī)
MXsteerCon—接口模塊

MXsteerMot模塊可以實現(xiàn)方向盤轉(zhuǎn)角和轉(zhuǎn)矩的精確控制。MXsteerMot主要有以下的功能:
▲額定轉(zhuǎn)矩:±11.0 Nm
▲最大轉(zhuǎn)矩:±34.0 Nm
▲最大速度:±6000°/s
▲角度測量:集成絕對位置編碼器(精度±0.05°)
▲轉(zhuǎn)矩測量:轉(zhuǎn)矩傳感器量程20Nm(精度±0.1Nm)
MXsteerCon是實現(xiàn)MXsteerAct和MXsteerMot精準(zhǔn)控制的關(guān)鍵模塊。其使用最先進(jìn)穩(wěn)定的EtherCAT控制信號協(xié)議,兼具精準(zhǔn)的基于模型的控制系統(tǒng),從而達(dá)到在虛擬環(huán)境下精確復(fù)制路試。 MXsteerCon主要提供以下接口:
▲兼容常見的實時系統(tǒng),如Vector,dSpace,NI,Concurrent,IPG等。
▲用于信號訪問和遠(yuǎn)程控制的通信接口
▲電源接口:400V電源,16A
▲簡單的19英寸機(jī)架或獨立機(jī)箱
▲用于安裝、測量、測試、驅(qū)動和診斷的功能
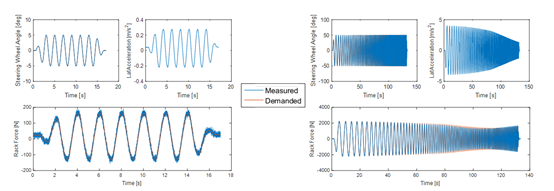
MXsteerHiL-實驗室的測試數(shù)據(jù)
MXsteerHiL可以創(chuàng)造真實的駕駛感覺,全新轉(zhuǎn)向執(zhí)行機(jī)構(gòu)設(shè)計及精確控制,可以實現(xiàn)卓越的HiL性能。
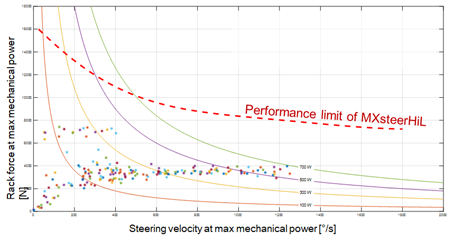
MdynamiX公司對大量的車輛配置進(jìn)行了17個實車測試案例、總共630個測試,從而制定了MXsteerHiL的標(biāo)準(zhǔn)規(guī)格,如圖所示,MXsteerHiL的性能范圍涵括了所有實車測試所需的動力范圍,因此MXsteerHiL可以在實驗室輕松復(fù)制精確的實車測試場景。
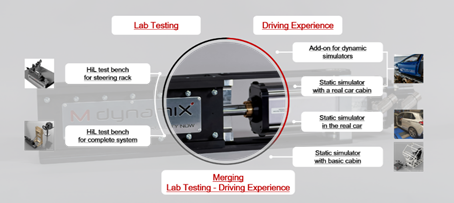
MXSteerHiL的使用場景
MXSteerHiL具有媲美真實轉(zhuǎn)向手感的系統(tǒng),不僅可以駕駛體驗階段使用,也可以在實驗室測試階段使用。
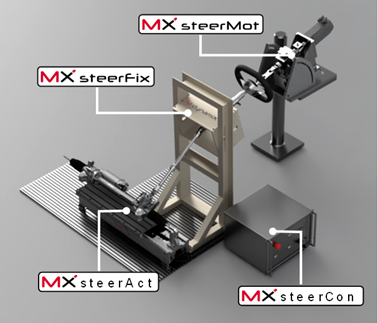
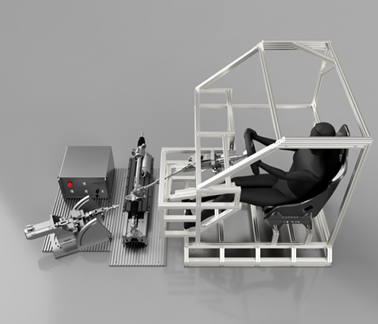
駕駛體驗的應(yīng)用-靜態(tài)駕駛模擬器
駕駛體驗階段的應(yīng)用主要結(jié)合靜態(tài)駕駛模擬器與基礎(chǔ)艙聯(lián)合使用。MXsteerHiL系統(tǒng)具有和實車一樣的轉(zhuǎn)向系統(tǒng)和定制的模擬器座艙。可以用最小的工作周期和驗證成本,將開發(fā)成果直接轉(zhuǎn)移到動態(tài)模擬器或升級到轉(zhuǎn)向試驗臺。該靜態(tài)模擬器主要包含MXSteerAct、MXSteerCon、MXSteerBox及鋁制的模擬座艙等組件。
駕駛體驗的運用-實車上的MXSteerHiL系統(tǒng)
由于MXsteerAct較小的體積及方便安裝的特性,可在實車底盤下方安裝MXsteerAct從而模擬車輪負(fù)載。這樣,測試系統(tǒng)既可以在實車靜態(tài)環(huán)境下進(jìn)行轉(zhuǎn)向測試,也可以將車輛裝在轉(zhuǎn)轂試驗臺上,在動態(tài)環(huán)境下,進(jìn)行轉(zhuǎn)向操作測試。

實驗室的應(yīng)用-轉(zhuǎn)向機(jī)架HiL試驗臺
MXSteerHiL系統(tǒng)在實驗室環(huán)境下通過緊湊的設(shè)計,專注于機(jī)架輔助EPS系統(tǒng)的功能,同時還可以保證必要的性能指標(biāo)。此外,基于MXSteerHiL的轉(zhuǎn)向系統(tǒng),可以實現(xiàn)HiL測試臺的高度緊湊,因此可以很容易地適配全轉(zhuǎn)向系統(tǒng)HiL臺架和主要測試EPS系統(tǒng)功能的臺架。
實驗室的應(yīng)用-全轉(zhuǎn)向系統(tǒng)的HiL試驗臺
在實驗室環(huán)境下MXSteerHiL系統(tǒng)可提供完整轉(zhuǎn)向系統(tǒng)的HiL測試解決方案。通過拆裝MXsteerMot可以順暢的切換人工轉(zhuǎn)向和自動轉(zhuǎn)向測試場景,可以涵蓋幾乎所有的測試用例,并且直接獲得真實的轉(zhuǎn)向手感。
實驗室和駕駛體驗
通過模塊化設(shè)計,可以實現(xiàn)用一個解決方案覆蓋實驗室的需求和駕駛感覺階段的需求。
北匯聯(lián)合MdynamiX公司將為您提供以下服務(wù):
我們稱職的團(tuán)隊提供全面的轉(zhuǎn)向HiL設(shè)置和專業(yè)調(diào)試。為了一個全方位無憂無慮的開始!
▲定制機(jī)械設(shè)計和制造用于實施的連接和適配器
▲將 MXsteerAct集成到真實車輛的底盤中
▲測試HiL系統(tǒng)的設(shè)置
▲聯(lián)合執(zhí)行第一個閉環(huán)測試
▲控制器的優(yōu)化
▲設(shè)置客戶特定的測試和評估
▲在道路或測試臺試驗中驗證整個系統(tǒng)
-
adas
+關(guān)注
關(guān)注
309文章
2168瀏覽量
208526
發(fā)布評論請先 登錄
相關(guān)推薦

毫末智行與高通宣布采用Snapdragon Ride平臺打造智能駕駛解決方案

什么是線控轉(zhuǎn)向系統(tǒng)?線控轉(zhuǎn)向技術(shù)淺析


ADAS1000采不到心電數(shù)據(jù)是怎么回事?
ADAS1000晶振不起振的原因?
ADAS1000為什么檢測不到數(shù)據(jù)?

鍵盤模組ATE手感測試機(jī):打造舒適鍵盤的關(guān)鍵利器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論