 智造之眼丨多目標定位抓取
智造之眼丨多目標定位抓取
多目標定位抓取:相機一次性拍攝多個目標產品,視覺軟件進行圖像分析定位,將像素坐標轉換為物理坐標,系統傳遞多個產品的物理坐標給機械手,機械手進行多位置正確取放產品。
01.多目標定位抓取優勢
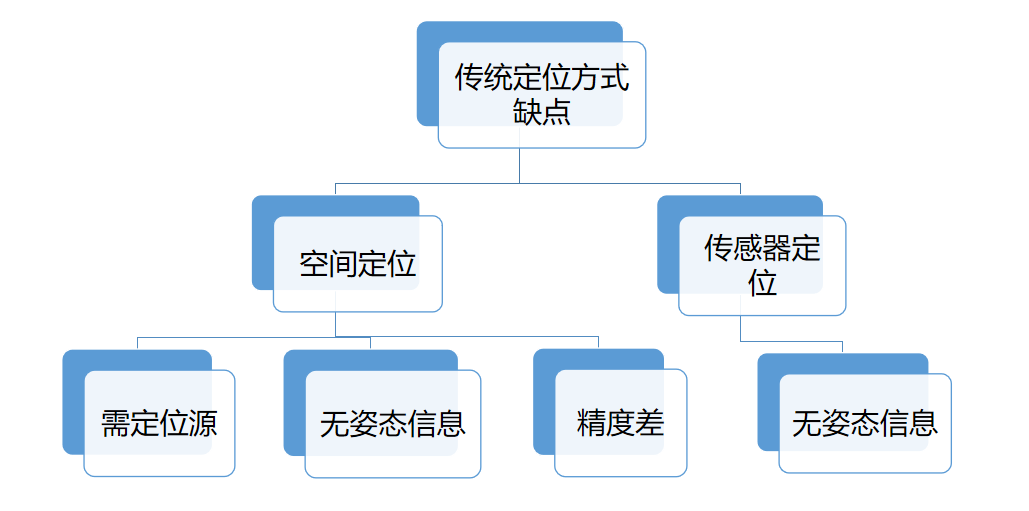
多目標定位抓取相對傳統定位而言:可同時傳遞多個產品坐標位姿信息給機械手實現多位置抓取,大大提升工業生產的速度和精度。
02.多目標定位原理
坐標轉換--四坐標系之間轉換
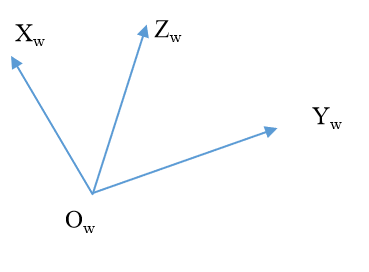
世界坐標系
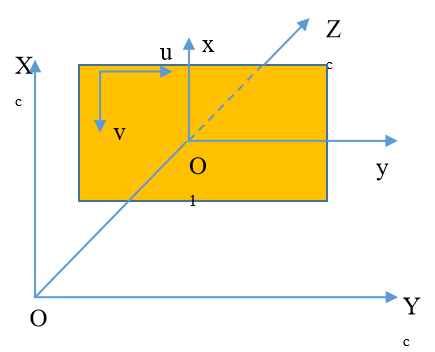
相機坐標系、圖像坐標系與像素坐標系

四坐標系轉換關系
03.多目標定位過程
視覺系統
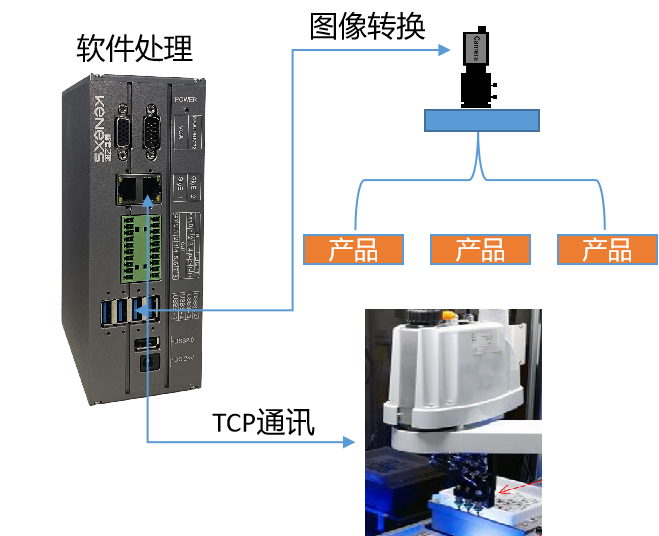
轉換步驟
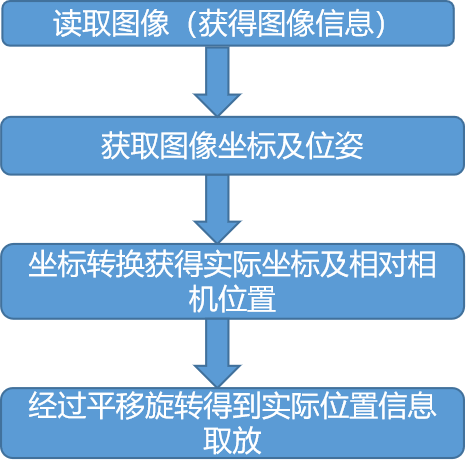
由此,機械手連接通訊獲得位置坐標,實現多目標產品的定位抓取。
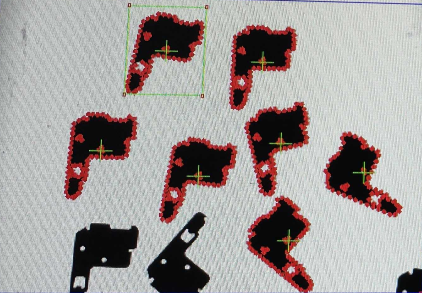
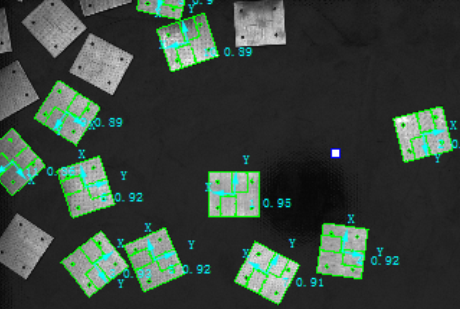
04.多目標定位抓取-算法運用
如何獲取產品特征信息?
1、特征值提取(圓、圓環、矩形等)
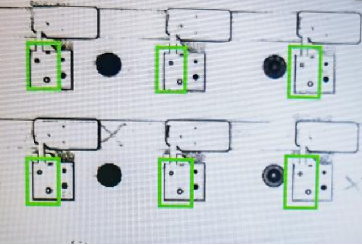
2、輪廓匹配法
3、模型匹配法等
05.多目標定位抓取-工業應用
由于工業生產應用類型多樣,實際定位不僅需要定位產品的位置信息,還需要定位產品的姿態信息。
工業生產應用類型
1、柔性振動盤機械手多位置抓取產品
2、多位置旋轉吸嘴多位置抓取

3、機械手四位置多產品抓取

智造之眼-應用數據
檢測件:五金件
產品大小:約20X15mm
相機配置:500萬~2000萬
重復抓取精度:0.04mm
拍照處理速度:400~500ms
一次拍照定位數量:10~12pcs
專業做視覺,認真做研發。智造之眼視覺團隊堅持突破技術,執著產品,深入應用,持之以恒的打造中國的視覺品牌,為世界提供又好又便宜的視覺產品和服務。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器視覺
+關注
關注
161文章
4345瀏覽量
120115 -
視覺檢測
+關注
關注
2文章
373瀏覽量
19210
發布評論請先 登錄
相關推薦
使用STT全面提升自動駕駛中的多目標跟蹤
3D多目標跟蹤(3D MOT)在各種機器人應用中發揮著關鍵作用,例如自動駕駛車輛。為了在駕駛時避免碰撞,機器人汽車必須可靠地跟蹤道路上的物體,并準確估計它們的運動狀態,例如速度和加速度。

重塑定位邊界:革新 UWB 信標定位系統測試套件,精準并發融合引領未來
面對日益復雜多變的應用場景及高并發需求的激增,巍泰技術特隆重推出采用 TurMass 無線通信技術的 UWB 信標定位系統測試套件 WTS-102 ,為各類復雜應用場景提供持續、可靠、精準的定位服務。

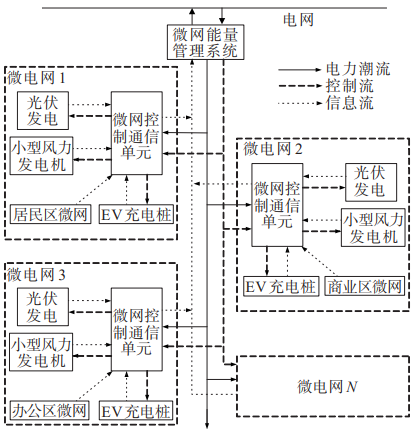
淺談分時電價下含電動汽車的微電網群雙層多目標優化調度
充電滿意度多目標下的電動汽車充電模式,建立了微電網內運營商峰谷差—用戶充電費用少和充電滿意度的雙盈多目標優化調度模型,采用上海市實際居民辦公商業混合體,基于MATLAB/NSGA?Ⅱ算法求解負荷整形度;采取粒子群優化算法求解電動汽車車主達

助力風電行業!深視智能SR7400線激光以機器人手眼標定實現風力葉片切割引導
機器人手眼標定在機器人視覺領域,手眼標定是重要的一步,也是使自動化系統更加精確高效的關鍵一環。手眼標定可以幫助機器人轉換識別到的視覺信息,從而完成后續的控制工作(如抓取、焊接、噴涂、搬

多目標智能識別系統
智慧華盛恒輝多目標智能識別系統是一種利用現代計算機視覺技術和人工智能算法,從圖像或視頻中同時識別和分類多個目標物體的系統。這種系統廣泛應用于自動駕駛、智能監控、人機交互、軍事偵察、災害監測等多個領域
室內精準定位都有哪些亮眼的優勢?
?了解這些你就更好選擇了。 一、室內精準定位都有哪些亮眼的優勢? 第一個優勢是產品安裝便捷,不占空間。要知道室內的空間比較有限,即便是大廠房主要的空間也用于安置設備,而好的定位產品體積小但是卻很高端,沒有太
基于GIS的SAR多目標智能識別系統
智慧華盛恒輝基于GIS的SAR多目標智能識別系統是一個集成了合成孔徑雷達(SAR)和地理信息系統(GIS)技術的先進系統,旨在實現高分辨率雷達圖像中的多目標智能識別。以下是該系統的詳細介紹: 智慧華
多目標跟蹤算法總結歸納
多目標跟蹤是計算機視覺領域中的一個重要任務,它旨在從視頻或圖像序列中準確地檢測和跟蹤多個移動目標。不過在落地部署時,有一些關鍵點需要解決。

以色列人工智能目標定位系統實力如何
2019年,以色列政府宣布成立“目標定位局”,旨在為以色列國防軍(IDF),特別是以色列空軍(IAF)生成打擊目標。
藍牙信標定位精度
藍牙信標定位精度受到多種因素的影響,包括設備硬件、環境因素以及信號干擾等。因此,藍牙信標的精度并不是固定的,而是會在一定范圍內波動。在我們實際應用過程中,藍牙信標的精度通常可以做到2-5米。本文重點


藍牙信標定位原理
定位原理:藍牙信標的定位原理是基于RSSI藍牙信號強度來做定位的。根據應用場景不同,通過RSSI定位原理可分為兩種定位方式一、存在性
機器視覺之Halcon入門學習
視覺定位應用主要是找到物體的位置,那么怎么找?在這里一個重要的步驟就是標定,標定是把相機的像素坐標系轉換為機械上的物理坐標系,使得圖像中的識別的像素值轉換為機械坐標值后發送給機械運動,找到目標
發表于 01-08 15:43
?2041次閱讀

基于隨機有限集的多傳感器多目標跟蹤技術
本文綜述了基于隨機有限集方法的多傳感器多目標跟蹤的最新研究進展。在多傳感器濾波中起基礎性作用的融合方法可分為數據層多目標測量融合和評估層多目標密度融合,分別共享融合傳感器之間的局部測量值與后驗密度。
發表于 12-04 10:39
?455次閱讀






 工商網監
工商網監
評論