") 全自動高效智能種樹小車
全自動高效智能種樹小車
本文針對目前人工種樹效率低的問題,設計了一種全自助高效智能種樹小車。介紹了裝置的結構組成,剖析了裝置的運動機理。通過SolidWorks三維軟件對傳動部件進行了結構設計。利用藍牙模塊實現(xiàn)了種植過程的信息傳遞、發(fā)送命令等,物聯(lián)網(wǎng)機智云模塊可以實時上報種植數(shù)據(jù)至云平臺。制作了裝置模型樣機,試驗測試結果表明:該裝置完成一棵樹的種植時間需要約8.45s,完成區(qū)域10m×10m的土地種植時間需要約73.85s。裝置完全實現(xiàn)了自動運樹、挖坑、下樹、填坑、澆水等功能,為樹木自動種植領域的研究奠定了基礎
傳統(tǒng)的種樹機器,只能夠針對種樹中的某一個環(huán)節(jié),無法真正實現(xiàn)全自動化種樹。例如郝朝陽等研究的基于51單片機的智能環(huán)湖種樹小車采用機械臂下樹,成本較高。隨著物聯(lián)網(wǎng)、數(shù)字技術和5G+技術的發(fā)展,種樹的水平有了進一步的提高。全自動化種樹不但能夠使種樹更加便捷,而且還能確保種樹的效率,因此全自動化種樹是解決土地荒漠化的必然趨勢。同時與5G技術和物聯(lián)網(wǎng)相結合,做到萬物互聯(lián)的理念。用戶可以通過遠程手機隨時隨地知道這片種樹區(qū)域種樹車的情況,也可以通過小車上的屏幕顯示了解情況,便于及時作出反應,極大地提高了工作效率。
 01裝置工作原理 圖1所示為種樹車整體結構。當確定了種樹區(qū)域時,該區(qū)域內(nèi)可以同時工作多輛種樹小車,在工作之前利用物聯(lián)網(wǎng)機智云云平臺下發(fā)每輛車的種植區(qū)域。此時種樹車向前運動至預定的區(qū)域,鉆頭利用GPS定位模塊確定種樹地點,鉆頭開始沿著光軸上下移動,根據(jù)種樹的類型,控制下挖的深度,挖出樹坑。與此同時,行星齒輪塔帶動樹夾開始轉動,當?shù)竭_樹坑上方時,停止轉動。車繼續(xù)向前運動,按照預先設置的樹距,確保樹夾夾的樹正好位于已挖好坑的上方。
01裝置工作原理 圖1所示為種樹車整體結構。當確定了種樹區(qū)域時,該區(qū)域內(nèi)可以同時工作多輛種樹小車,在工作之前利用物聯(lián)網(wǎng)機智云云平臺下發(fā)每輛車的種植區(qū)域。此時種樹車向前運動至預定的區(qū)域,鉆頭利用GPS定位模塊確定種樹地點,鉆頭開始沿著光軸上下移動,根據(jù)種樹的類型,控制下挖的深度,挖出樹坑。與此同時,行星齒輪塔帶動樹夾開始轉動,當?shù)竭_樹坑上方時,停止轉動。車繼續(xù)向前運動,按照預先設置的樹距,確保樹夾夾的樹正好位于已挖好坑的上方。
推樹的電推桿橫向運動,推動樹苗剝離開樹夾,在限位裝置的限制下,利用樹和樹底部本身的重力,豎直掉落在坑中。當樹落下的時候,會遮擋激光發(fā)射器發(fā)射出來的紅外線,接收器未接收到紅外線,將信息通過藍牙傳給推土機構,電推桿開始橫向運動,將鉆頭挖出的土重新匯聚到坑中時,垂直的電推桿在楔塊調(diào)整后的角度向下運動,實現(xiàn)壓土的功能。壓土結束后,啟動水泵實現(xiàn)澆水功能,保證了樹苗的存活。
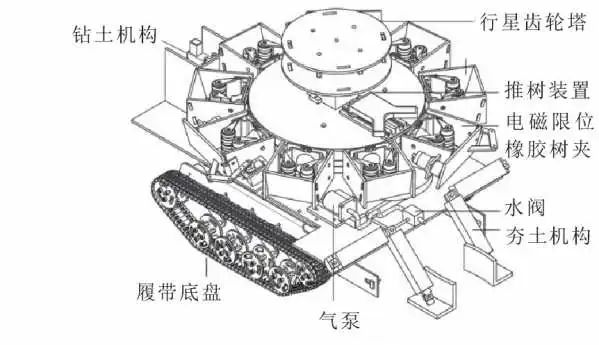 圖1種樹車整體結構
圖1種樹車整體結構
在車體后部運樹、下樹、壓土,澆水的過程中,在車體的前部鉆頭位置,GPS定位模塊已經(jīng)定位并挖好下一個坑洞,種樹小車向前移動,重復種樹的過程。這樣前后同時工作極大地提高了工作效率。每種完一棵樹,物聯(lián)網(wǎng)機智云模塊便會將剩余的樹苗信息和剩余的水量返回至云平臺,當樹苗余量和水量不足時,會發(fā)出報警信號,返回種樹的補給站進行補給。樹苗余量不足回到補給站時,對應的樹夾運動至上樹的機械臂對面,舵機和電磁閥接收到返回信號,電磁閥斷電,舵機帶動著曲柄連桿運動,打開正面的限位裝置,便于機械臂上樹。
在鉆頭上方安裝有圖像識別攝像頭,拍攝的視頻可以上傳到物聯(lián)網(wǎng),利用opencv分析視頻和瞬時圖片,可以得出樹苗種植情況的信息,主要包括是否垂直種植和土壤是否壓平。為了精準定位鉆頭所挖的洞,采用了GPS北斗定位模塊,鉆頭運動到預先設置的位置上下運動挖坑,樹苗的定位可以實時返回樹苗種植的位置,并且返回云平臺,在云平臺的種樹地圖上標注已種區(qū)域和未種植的區(qū)域,直觀明顯看出整個區(qū)域的種植情況。同時與5G技術和物聯(lián)網(wǎng)相結合,做到萬物互聯(lián)的理念。整體的監(jiān)測和信息傳遞采用了藍牙模塊和物聯(lián)網(wǎng)機智云模塊,物聯(lián)網(wǎng)部分可以與手機app進行實時的信息交流,以及上報種植數(shù)據(jù)至云平臺。
02裝置結構設計2.1行星齒輪轉動機構 上層行星齒輪通過帶動外環(huán)實現(xiàn)樹夾的轉動,下層行星齒輪為了解決齒輪轉動過程中電控部分接線的纏繞問題,在其上方設計有控制電池閥和舵機運動的單片機。兩層通過電機的兩軸連接,實現(xiàn)同向同步轉動。通過電機驅(qū)動太陽齒輪轉動,太陽齒輪帶動3個行星齒輪轉動,再帶動齒輪架轉動,經(jīng)此過程實現(xiàn)樹夾的圓周運動,實現(xiàn)樹苗的儲存和運送。行星齒輪如圖2所示。
 圖2行星齒輪轉動機構示意圖
圖2行星齒輪轉動機構示意圖
2.2可開閉式電磁限位橡膠樹夾 橡膠的掛鉤當做樹夾,利用橡膠輪和橡膠墊的固定實現(xiàn)穩(wěn)定夾樹的功能。設計三面限位裝置包括左側面限位裝置、右側面限位裝置和正面限位裝置。在樹下落的過程中,與限位裝置的回彈碰撞可以有效控制樹的落下范圍。所述的左側面限位裝置配有開門舵機,右面?zhèn)让嫦尬谎b置配有電磁開合裝置,正面限位裝置與左側面限位裝置利用曲柄連桿與開門舵機連接,開門舵機和曲柄連桿的配合實現(xiàn)正面限位裝置的打開,打開之后可以實現(xiàn)機械臂上樹,上樹過程結束,關閉正面限位裝置,電磁開合裝置吸住正面限位裝置,實現(xiàn)限位的功能,如圖3所示。
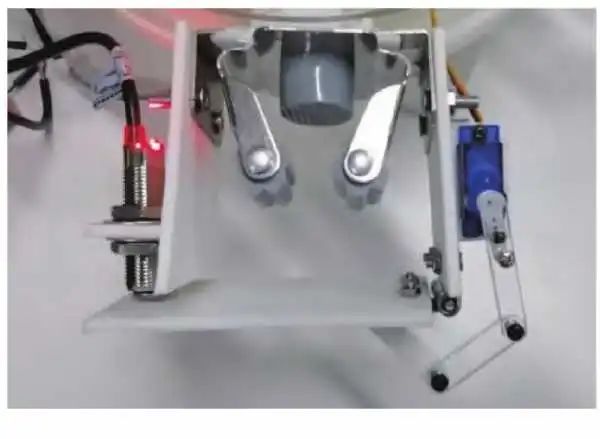 圖3可開閉式電磁限位橡膠樹夾
圖3可開閉式電磁限位橡膠樹夾
2.3互相垂直電推桿推土結構 在車體后部合適高度處,確保電推桿完全伸出時能夠達到夯土的目的,左右分別設置一組電推桿組成推土裝置。每一組由兩個電推桿垂直連接組成,水平方向的電推桿下方固定了一個傾斜角度為30°的推土裝置固定塊,確保水平方向的電推桿能夠?qū)渲車诔龅耐辆奂谝黄稹4怪庇谒椒较虻碾娡茥U頂端連接夯土板,可以根據(jù)土壤的平整程度自我調(diào)節(jié)壓土的角度,并且同時左右前后移動,實現(xiàn)聚土和壓土的功能,如圖4所示。
 圖4互相垂直電推桿推土結構
圖4互相垂直電推桿推土結構
03電控方案的設計 主控板選用ArduinoNano控制板,與電機驅(qū)動模塊、圖像識別攝像頭、GPS北斗定位模塊、電推桿、螺旋鉆頭、機智云物聯(lián)網(wǎng)模塊等外設相連,再通過激光發(fā)射接受器、水位檢測模塊等傳感器采集信息,控制種樹各個過程的進行。
主控板通過GPS北斗定位模塊采集的信息確定具體種樹的位置,以此實現(xiàn)區(qū)域化的種植,便于多輛種樹小車同時工作而互不發(fā)生干擾。主控板通過圖像識別攝像頭拍攝的視頻可以上傳到物聯(lián)網(wǎng),利用opencv分析視頻和瞬時圖片,可以得出樹苗種植情況的信息,主要包括是否垂直種植和土壤是否壓平。主控板通過激光發(fā)射接受器返回的信息確定樹苗是否被種下,決定后續(xù)的壓土操作。
種樹小車電控設計主要分為兩部分:一部分為藍牙模塊實現(xiàn)了種植過程的信息傳遞,發(fā)送命令等;另一部分通過物聯(lián)網(wǎng)機智云模塊可以實時上報種植數(shù)據(jù)至云平臺。圖5為種樹小車控制框圖。
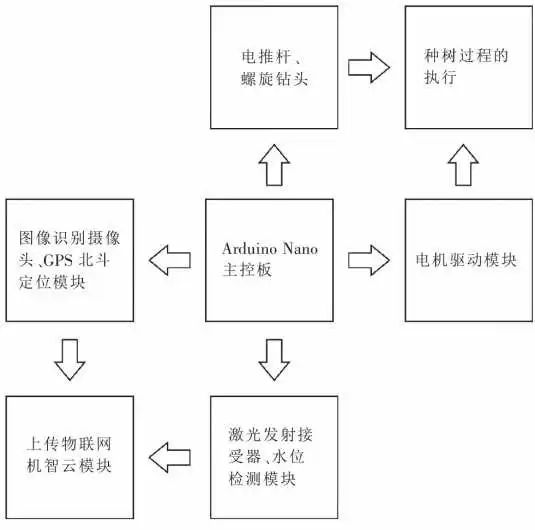 圖5種樹小車控制框圖
圖5種樹小車控制框圖
文中項目添加物聯(lián)網(wǎng)控制功能,如圖6所示。以ESP8266為媒介,借助node-red在線工具搭建物聯(lián)網(wǎng)平臺,PC端作為總控制臺接收各類傳感器反饋的數(shù)據(jù)用以監(jiān)測植樹機器人各項指標,保證機器人正常工作。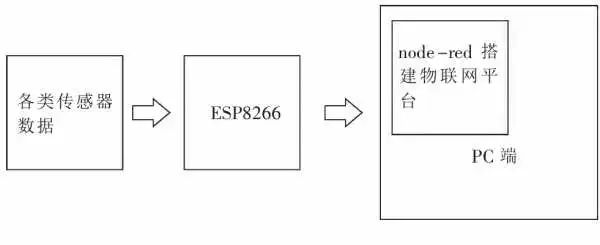 圖6物聯(lián)網(wǎng)控制框圖
圖6物聯(lián)網(wǎng)控制框圖
04試驗測試 傳統(tǒng)的種樹機器,只能夠針對種樹中的某一個環(huán)節(jié),無法真正實現(xiàn)全自動化種樹。相較于大型的植樹設備,該種樹小車在確保功能完整的情況下,合理設計,實現(xiàn)了體積最小化的目標。物聯(lián)網(wǎng)與機器視覺opencv的結合,確保了種樹過程信息的完整上報,特殊情況發(fā)生時便于及時調(diào)整。
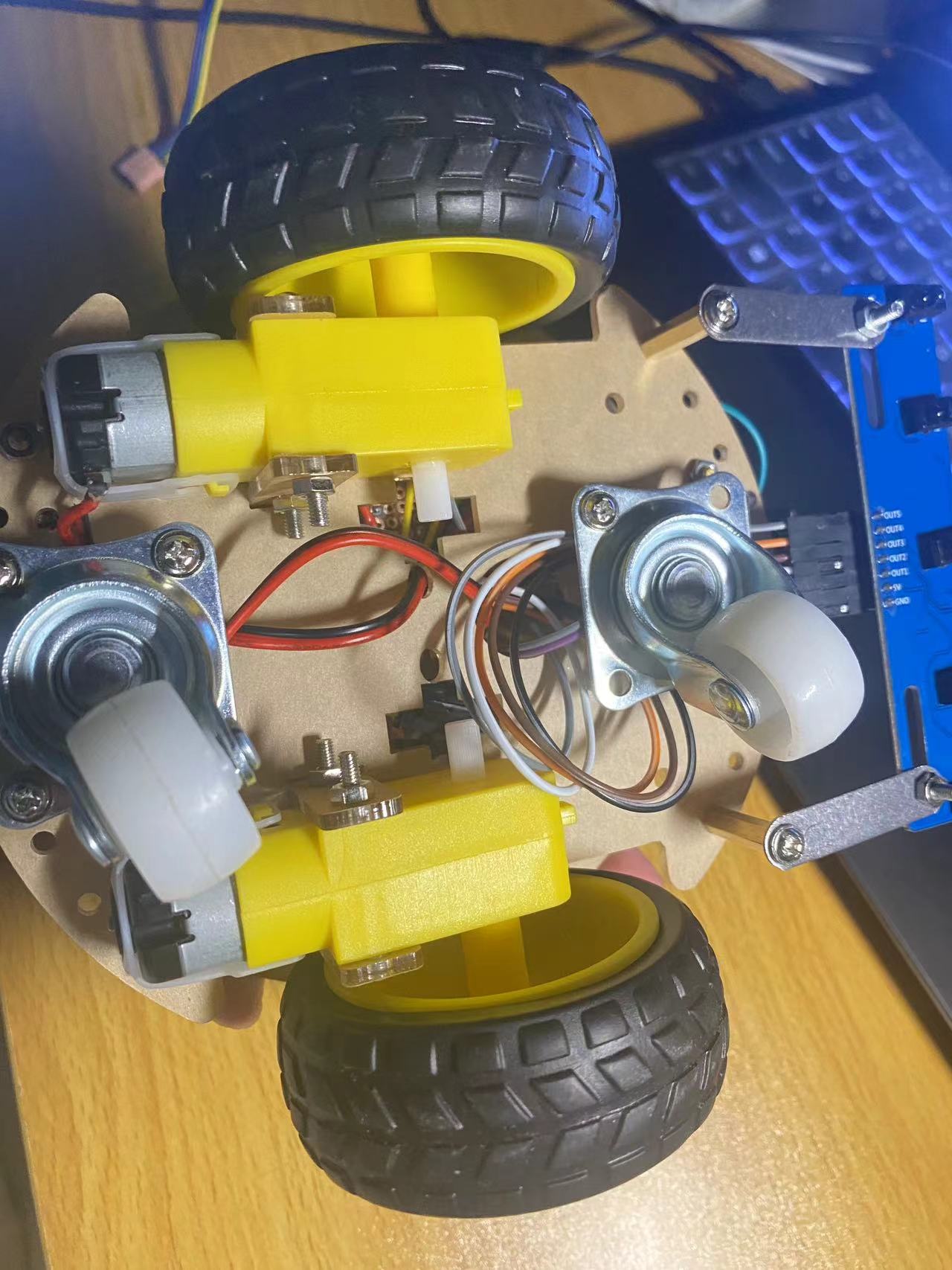
通過分析,制作了一種全自動高效智能種樹小車實物模型如圖7所示,尺寸為500mm×300mm×315mm。對該實物模型進行了試驗測試,數(shù)據(jù)如表1所示,完成一棵樹的種植平均需要約8.41s,完成區(qū)域10m×10m的土地種植平均需要約73.85s。裝置在試驗測試過程中,種植過程順利。
 圖7實物模型圖
圖7實物模型圖
表1試驗測試數(shù)據(jù)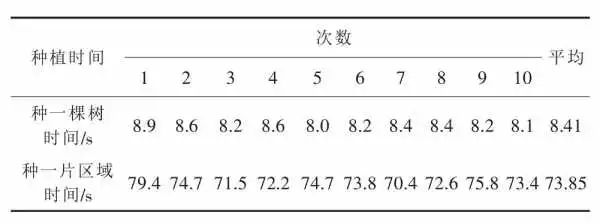 05結論 該裝置能夠?qū)⒎N植、自動運樹、自動挖坑、自動下樹、自動填坑、自動澆水結合在一起,真正實現(xiàn)解放雙手,自動化種樹,在前面一系列工作完成之后,后綴水箱噴水,保證了樹苗的存活。合理的結構安排極大地提高了空間利用率,前后同時工作,提高了工作效率,適合大批量投入生產(chǎn)。
05結論 該裝置能夠?qū)⒎N植、自動運樹、自動挖坑、自動下樹、自動填坑、自動澆水結合在一起,真正實現(xiàn)解放雙手,自動化種樹,在前面一系列工作完成之后,后綴水箱噴水,保證了樹苗的存活。合理的結構安排極大地提高了空間利用率,前后同時工作,提高了工作效率,適合大批量投入生產(chǎn)。
-
自動化
+關注
關注
29文章
5519瀏覽量
79113
發(fā)布評論請先 登錄
相關推薦
智能化全自動點焊機電源:創(chuàng)新科技引領高效焊接新紀元

IO模塊:AGV小車自動化控制的得力助手

關于全自動裝車機器人的詳細介紹
艾畢勝電子全自動跟拍智能云臺驅(qū)動板方案的神秘面紗

【科技前沿】MT6501磁編碼IC在智能AGV小車中的應用
一鍵啟動,精準切割——全自動激光下料機:您的智能生產(chǎn)伙伴!
半自動和全自動智能鎖的功放,電源設計方案

平推全自動上料激光切管機:革新管材加工,引領智能制造新篇章

智能切割,輕松應對各種管材:側掛全自動激光切管機
全自動激光切管機:高效、精確的切割利器
SMT生產(chǎn)線的未來已來:全自動智能智造設備一網(wǎng)打盡!

全自動影像測量儀圖像自動匹配對焦介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論