") 學(xué)技術(shù) | 一文讀懂 UWB 定位原理
學(xué)技術(shù) | 一文讀懂 UWB 定位原理
UWB測距原理
無線定位基本概念
無線定位:通過對無線電波的一些參數(shù)進(jìn)行測量,根據(jù)特定的算法來判斷被測物體的位置。測量參數(shù)一般包括無線電波的傳輸時(shí)間、幅度、相位和到達(dá)角等。
基于三角關(guān)系定位技術(shù):先要測量已知位置的參考點(diǎn)(A, B, C 三點(diǎn))與被測物體之間的距離(R1, R2, R3),然后利用三角知識計(jì)算被測物體的位置。
l ToF:基于電磁波到達(dá)時(shí)間,換算出距離采樣的定位模式
l TDoA:固定基站在精確同步的條件下,基于電磁波達(dá)到時(shí)間差,換算出距離差的定位模式
l 地圖服務(wù)器:在統(tǒng)一的坐標(biāo)體系中,將(空間對象元素,位置信息)保存在后臺地圖數(shù)據(jù)庫中,并按照一定比例尺通過地圖界面統(tǒng)一展現(xiàn)。
定位精度:地圖上顯示的位置,與終端實(shí)際物理位置的偏差值。
定位時(shí)延:在地圖上顯示終端位置的實(shí)際刷新周期。
UWB技術(shù)
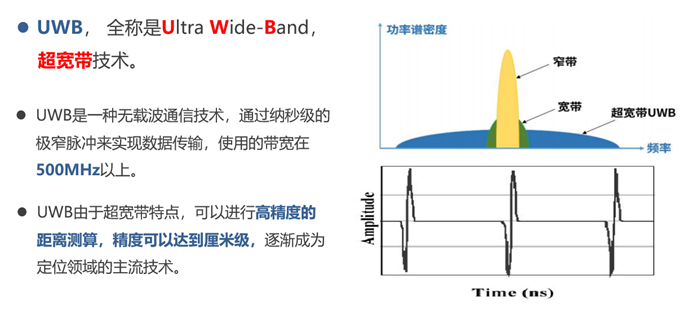
超寬帶(Ultra Wide Band,UWB)技術(shù)是一種無線載波通信技術(shù),它不采用正弦載波,而是利用納秒級的非正弦波窄脈沖傳輸數(shù)據(jù),因此其所占的頻譜范圍很寬。
UWB技術(shù)具有系統(tǒng)復(fù)雜度低,發(fā)射信號功率譜密度低,對信道衰落不敏感,截獲能力低,定位精度高等優(yōu)點(diǎn),尤其適用于室內(nèi)等密集多徑場所的高速無線接入。
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
UWB特點(diǎn)
首先是超寬頻,其頻率覆蓋從3G~5G,6G~10G 共7G 的頻段,單信道帶寬超過500MHz。
其次是功率低,按FCC 等法規(guī),其輸出功率被限制在-41dBm/MHz,按單個(gè)信道500MHz計(jì)算,其信道功率為-14.3dBm。
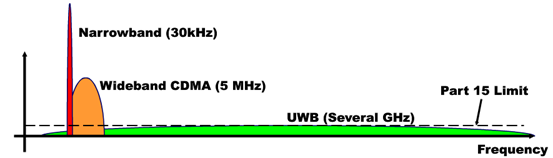
UWB頻域圖
再其次,超短脈沖,維持時(shí)間為零點(diǎn)幾納秒
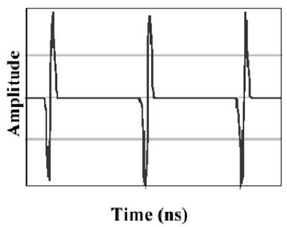
UWB時(shí)域圖
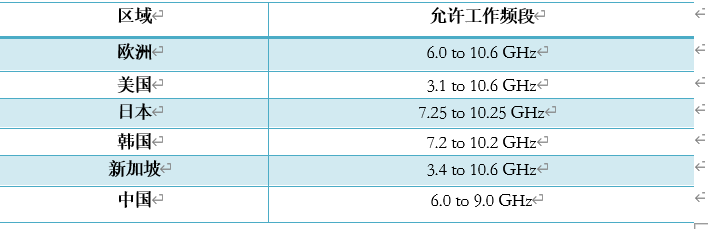
工作頻段:
全球可用的頻段分布表如下
 ? ? ? ? ? ? ? ? ? ?
? ? ? ? ? ? ? ? ? ?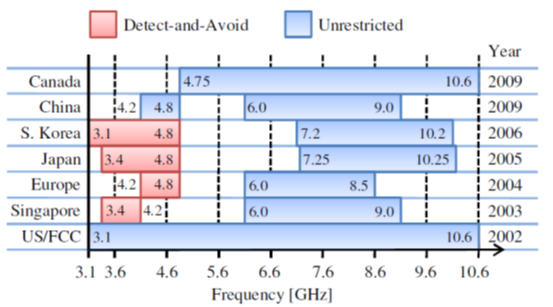
各國UWB工作頻段
UWB信道劃分:
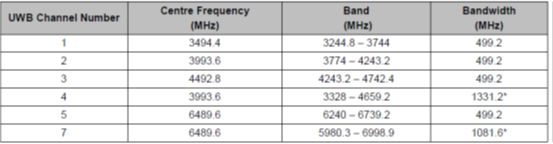
信道劃分中,有兩種信道,一種是500MHz 信道,另外一種為1GHz 信道,目前主要采用500MHz 信道。即信道1、2、3、5 這四個(gè)信道。
輸出功率和法規(guī)
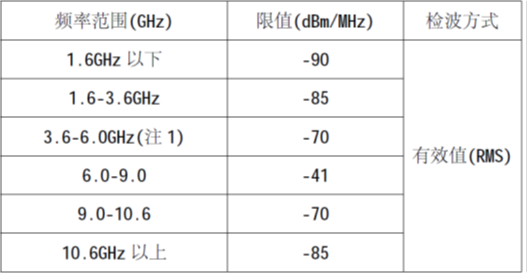
FCC 的規(guī)定,最高不超過-41dBm/MHz.
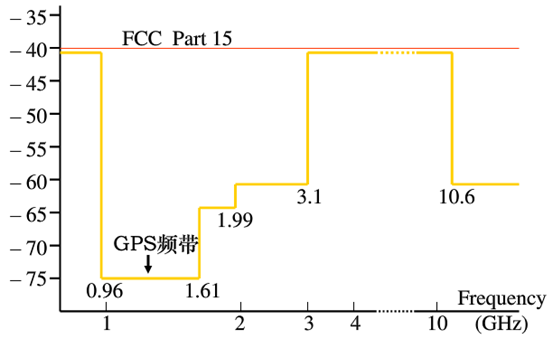
FCC規(guī)范
中國的功率規(guī)定:
工作速率和靈敏度
DW1000 提供三種不同的工作速率,為110Kbps,850Kbps,6.8Mbps,在不同頻率和不同速率下,對應(yīng)的靈敏度不同。
測試條件:25℃
丟包率:1%
頻率偏差: ±10%

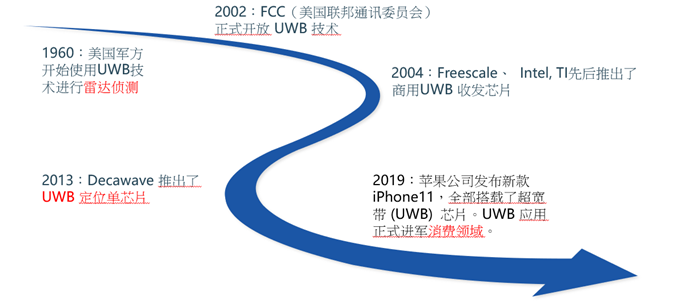
UWB的發(fā)展
UWB測距原理
TOF
ToF傳感器使用微小的發(fā)射器發(fā)射紅外光或者激光,其中產(chǎn)生的光會從任何物體反彈并返回到傳感器。根據(jù)光的發(fā)射與被物體反射后返回傳感器之間的時(shí)間差,傳感器可以測量物體與傳感器之間的距離。
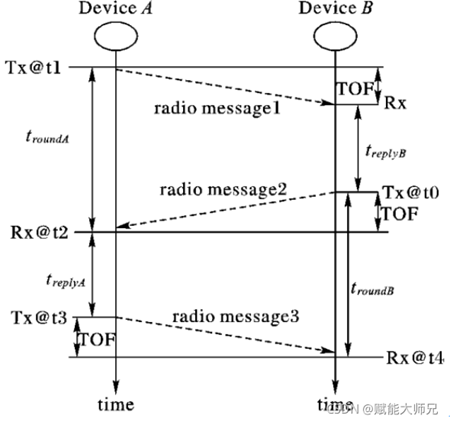
上圖所示為雙向測距過程:設(shè)備A作為測量距離的發(fā)起者發(fā)起測距請求,設(shè)備B作為響應(yīng)者響應(yīng)和偵聽設(shè)備A發(fā)起的無線電消息。A給B發(fā)送一個(gè)無線電消息并記錄它的發(fā)送時(shí)間戳t1,B收到信息后并在一個(gè)特定時(shí)時(shí)延treplyB 后發(fā)送一個(gè)回復(fù)給A,當(dāng)A收到回復(fù)并記錄一個(gè)接受時(shí)間戳t2后,再經(jīng)過一個(gè)特定的時(shí)延treplyA 發(fā)送一個(gè)無線電消息給B并記錄發(fā)送時(shí)間戳t3,最后B接收到信息并記錄時(shí)間戳t4。 由于往返時(shí)間皆已知,則可以得到:troundA= treplyB + 2TOF = t2 - t1 troundB = treplyA + 2TOF = t4 - t0
則信號的飛行時(shí)間為:TOF = (troundA - treplyA + troundB-treplyB)/4
注:radio message2 在troundA和troundB的計(jì)算中引入了兩次,所以最終計(jì)算飛行時(shí)間需要除以4 不是3.,有人會疑惑為什么要計(jì)算多次取平均值,首先任何定位都只能精確不能準(zhǔn)確,都存在誤差的,且UWB 在傳播中也存在多路徑效應(yīng),反射和吸收,這些都會對精度產(chǎn)生一定影響,通過以上方法取平均值能使精度最大化。
UWB定位原理
ToF
AP1~AP3,分別指的是3個(gè)Anchor。
當(dāng)Tag與3個(gè)Anchor完成測距后,就會有3個(gè)對應(yīng)的距離值d1~d3。以Anchor為圓心,3個(gè)圓相交與1點(diǎn)即為Tag所在位置,這是一種理想模型。實(shí)際情況是,3個(gè)基站的距離在三維中實(shí)際是3個(gè)球相交。大多數(shù)情況,由于測距本身有誤差,所以3個(gè)球相交的是一個(gè)區(qū)域。算法要做的就是在這個(gè)區(qū)域范圍內(nèi)取一個(gè)最接近標(biāo)簽真實(shí)位置的解。
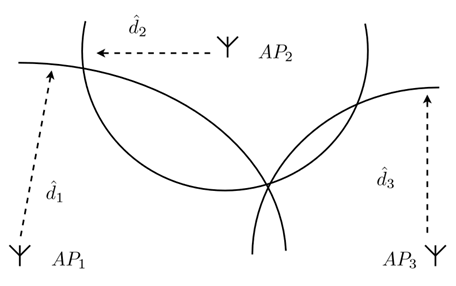
三點(diǎn)定位原理
TDoA
Master(主)基站發(fā)送sync(同步)報(bào)文,Slaver(從)基站接收并做同步處理。
Tag(標(biāo)簽)發(fā)送poll報(bào)文,基站接收并記錄時(shí)間戳。
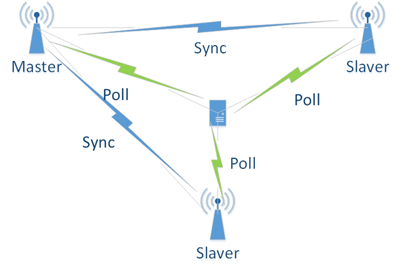
TDoA基站無線同步
AP1:記錄的poll到達(dá)時(shí)間為T1
AP2:記錄的poll到達(dá)時(shí)間為T2
AP3:記錄的poll到達(dá)時(shí)間為T3
由于AP1、AP2、AP3時(shí)間是同步的,所以
DT1=T1-T2,AP1與AP3之間的時(shí)間差DR1=C*(T1-T2),畫雙曲線1
DT2=T1-T3,AP1與AP2之間的時(shí)間差DR1=C*(T1-T3),畫雙曲線2
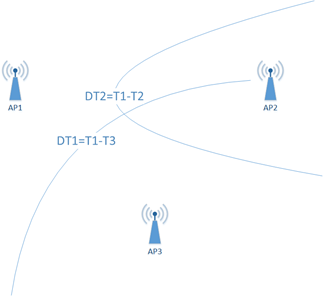
TDoA定位原理
-
UWB
+關(guān)注
關(guān)注
32文章
1081瀏覽量
61015
發(fā)布評論請先 登錄
相關(guān)推薦

UWB標(biāo)簽與其他定位技術(shù)的比較
UWB技術(shù)如何實(shí)現(xiàn)不同維度的定位需求
煤礦人員定位系統(tǒng)——基于UWB技術(shù)帶電子圍欄功能
一文介紹:UWB定位基站種類及選擇

一文介紹:UWB定位標(biāo)簽種類及選擇

為什么UWB定位技術(shù)適用于室內(nèi)定位?
UWB人員定位系統(tǒng)的定位原理
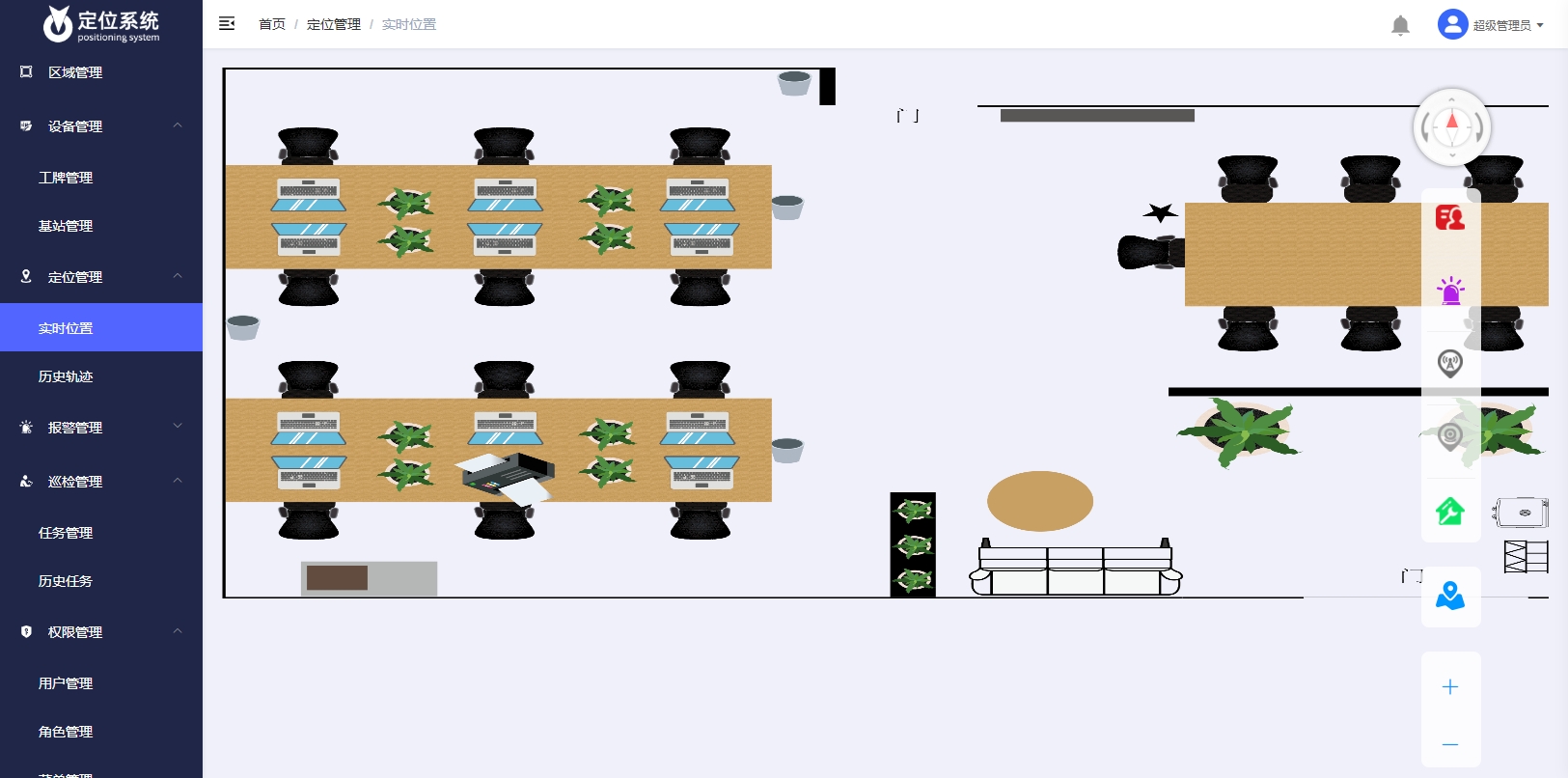
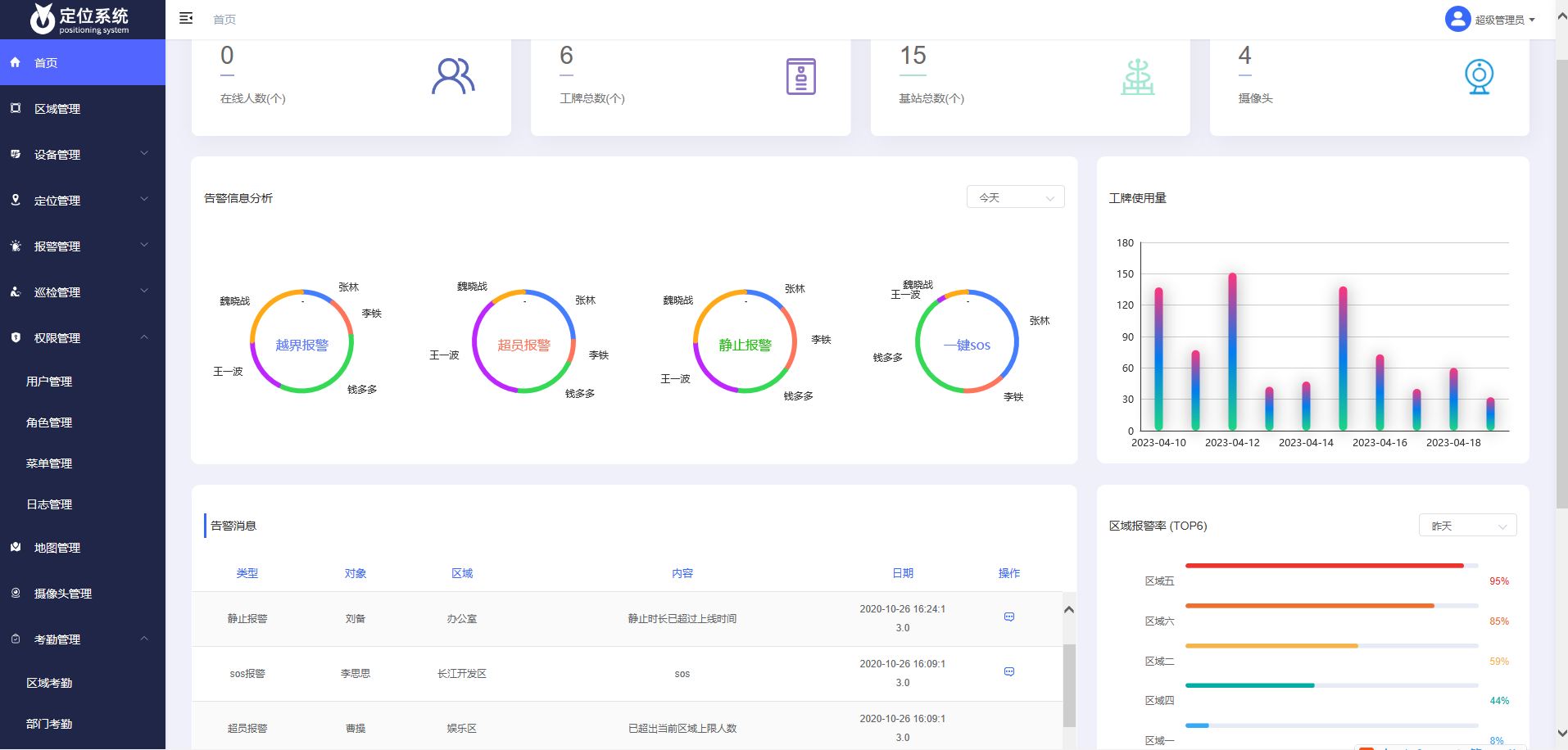
基于java+單體服務(wù) +?硬件(UWB定位基站、卡牌)技術(shù)架構(gòu)開發(fā)的UWB室內(nèi)定位系統(tǒng)源碼

一文帶你了解什么是UWB三角定位、TDoA和PDoA定位






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論