 功能實用|編輯簡單|CRT直坐標機器人示教編程案例
功能實用|編輯簡單|CRT直坐標機器人示教編程案例
CRT-DMC630MF三軸桁架機械手示教系統是基于三軸運動控制器DMC630M的硬件平臺,在公司三軸仿形示教系統成熟的技術和廣泛的市場應用的基礎上,根據市場需求,采納了廣大客戶的寶貴意見,并參考國內外高端同類產品的一些功能及優點,經深圳市科瑞特自動化全體同仁的共同努力,推出的一款功能齊全、使用方便靈活的高端運動控制系統。
例程要求:如圖1所示:圖中立方體為障礙物,加工點不能與之觸碰,P1點為取料點,P2點位放料點,首先移動到P1點,取料(OT1為1),延時1000ms,檢測是否取到料(IN16),若沒有取到料(IN16有效)發出報警信號(OT3),直到解除報警(IN17有效),取到料后抬高到安全位(P3),移動到P4,再移動到放料點P2,放料(OT1為0),移動到P4,移動到P3,檢測是否還要取料(IN18),如果IN18有效,移動到P1重復之前動作,如果IN18無效,回原點P5。
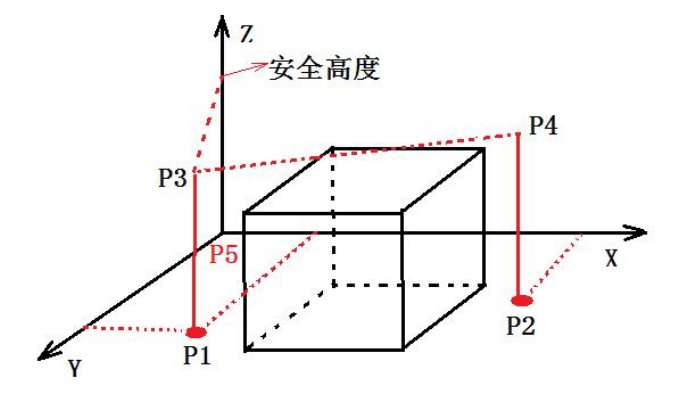 圖1
圖1操作步驟如下:
1.用戶登錄。
2.設置當前工件序號。
3.設計工藝流程:根據例程要求設計工藝流程,具體流程如圖2所示。
4.編輯工藝程序:根據工藝流程編輯工藝程序 ,具體的圖元指令以及指令對應的參數如 圖3所示
5.軌跡采集:按照上一個例程的方法,分別采集點1~5的坐標信息。
6.運行驗證:返回到“模式選擇”界面,按“3”進入“運行模式”界面,按“F1”運行,然后按控制器上連接的運行按鈕,觀察運行結果。
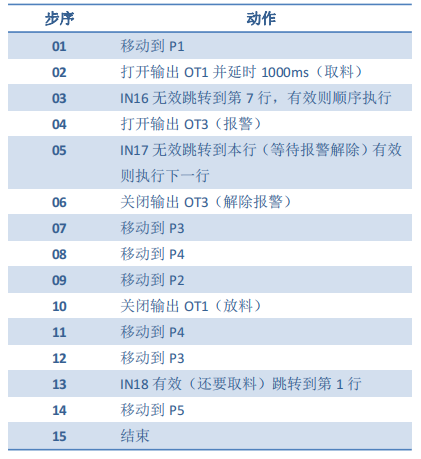 圖2
圖2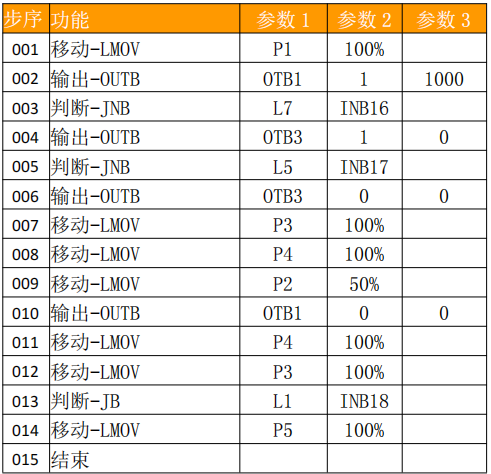 圖3
圖3 直坐標機器人控制系統
直坐標機器人控制系統專業提供工業自動化運動控制技術及解決方案!
---(激光)焊接、拋光、切割、桁架機械手、等特種數控設備運動控制系統。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28212瀏覽量
206568
發布評論請先 登錄
相關推薦
歐姆龍協作機器人TM25S可使用多種方法進行編程
按鈕,即可完成位置示教。 ? 圖形化編程 TM25S可通過使用軟件工具TMflow在屏幕上繪制流程圖,可以輕松描述機器人的動作和處理邏輯。TMflow還可以對協作


什么是拖動示教?機器人拖動示教方式分析
多變的特點,滿足制造業日益增長的復雜性要求。 機器人拖動示教,就是操作員可以直接拖著機器人各關節,運動到理想的姿態,記錄下來。協作機器人是較

基于導納控制的機器人拖動示教原理和實現步驟
過程位置,完成示教工作。? ? ??示教過程中,需要克服機器人連桿重力矩、摩擦力矩和慣性力矩。? ? ??基于動力學模型拖動示教模塊主要分為

工業機器人常用的編程方式
機器人完成特定的任務。編程可以手動完成,也可以通過計算機輔助設計(CAD)軟件自動生成。編程方式的選擇取決于任務的復雜性、機器人的類型、以及所需的靈活性和效率。 1. 手動
工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析!
當前機器人廣泛應用于焊接、裝配、搬運、噴漆及打磨等領域,任務的復雜程度不斷增加,而用戶對產品的質量、效率的追求越來越高。在這種形式下,機器人的編程方式、編程效率和質量顯得越來越重要。降

abb工業機器人的編程語言是什么
編程而設計。RAPID語言具有易學易用、功能強大、靈活性高等特點,廣泛應用于ABB工業機器人的編程和應用開發。 ABB工業機器人
廣和通發布機器人開發平臺
廣和通近日隆重發布了其全新研發的具身智能機器人開發平臺——Fibot。該平臺旨在滿足客戶在驗證Mobile ALOHA協同學習與簡單示教操作數據方面的需求,通過深度學習,使機械臂能夠習
基于RK3568核心板的工業示教器解決方案
難的問題,且自帶的監控功能可提供安全的使用保障。“示教器”是一種手持裝置,廣泛應用于機器人控制系統中。它通過通訊電纜連接控制柜或運動控制器,可以設置運動參數和編寫機






 工商網監
工商網監
評論