") 案例|如何搭建高階自動(dòng)駕駛數(shù)據(jù)采集平臺(tái)
案例|如何搭建高階自動(dòng)駕駛數(shù)據(jù)采集平臺(tái)
前言
目前自動(dòng)駕駛技術(shù)處于高速發(fā)展的時(shí)期,L3逐漸進(jìn)入量產(chǎn)階段,L4/L5自動(dòng)駕駛級(jí)尚處于開發(fā)和驗(yàn)證階段,需要大量的路試數(shù)據(jù)做算法訓(xùn)練和驗(yàn)證。為了滿足L4及以上算法訓(xùn)練和驗(yàn)證的需求,北匯信息提供路試數(shù)據(jù)采集設(shè)備并搭建數(shù)據(jù)采集平臺(tái),給客戶提供一站式解決方案。典型客戶,比如一汽南京,已經(jīng)在高階自動(dòng)駕駛技術(shù)開發(fā)中進(jìn)行應(yīng)用。
數(shù)據(jù)采集平臺(tái)可以為人工智能視覺攝像頭、激光雷達(dá)、高精度定位等感知算法開發(fā)提供源源不斷的數(shù)據(jù),是自動(dòng)駕駛算法開發(fā)及驗(yàn)證的必備工具。
- 傳感器及采集設(shè)備選型
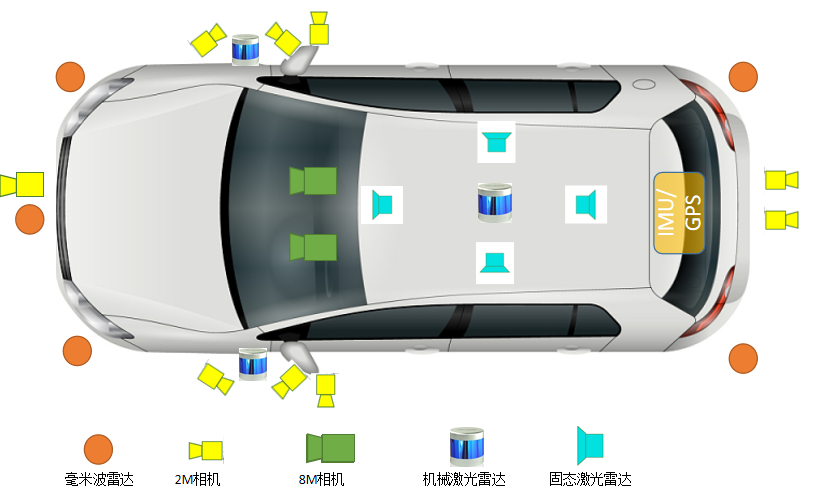
高階自動(dòng)駕駛需要用到的傳感器主要有8MP前視雙目攝像頭、2MP環(huán)視攝像頭、2MP/8MP周視攝像頭、固態(tài)激光雷達(dá)、機(jī)械激光雷達(dá)、GPS/IMU/RTK、毫米波雷達(dá)等。典型的傳感器配置和安裝位置如下:
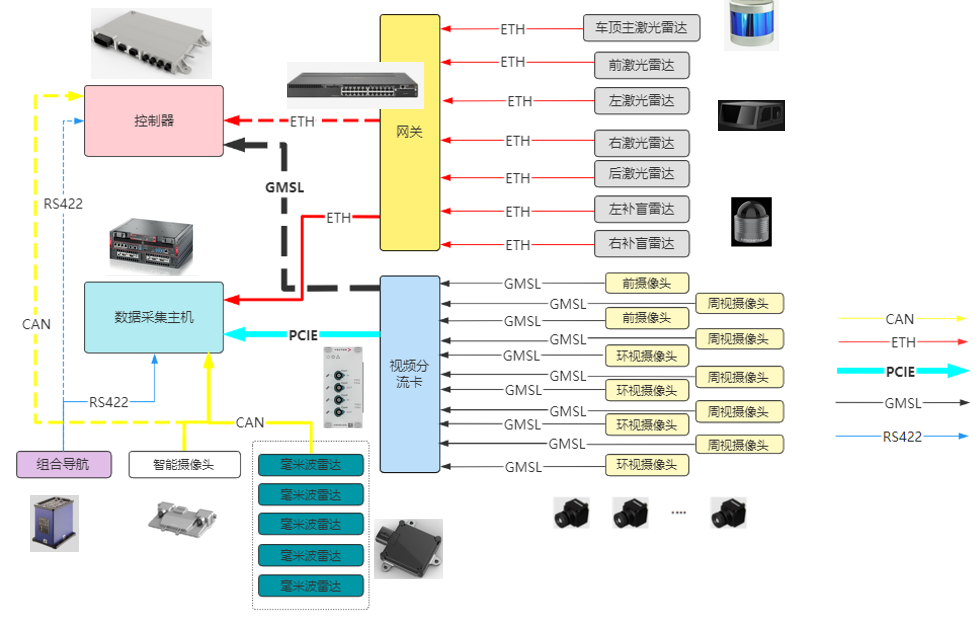
針對(duì)以上傳感器型號(hào)選擇對(duì)應(yīng)型號(hào)的采集設(shè)備和采集主機(jī);需要重點(diǎn)關(guān)注數(shù)據(jù)的存儲(chǔ)帶寬和攝像頭的解串器和傳輸協(xié)議以及采集主機(jī)處理器性能。另外,數(shù)采系統(tǒng)在采集數(shù)據(jù)的同時(shí)需要提供數(shù)據(jù)分流通道,將傳感器數(shù)據(jù)分流給控制器,在數(shù)據(jù)采集的同時(shí)不影響傳感器和控制器之間的通訊。采集系統(tǒng)的數(shù)據(jù)路由如下圖。多個(gè)激光雷達(dá)數(shù)據(jù)通過以太網(wǎng)經(jīng)過網(wǎng)關(guān)傳輸?shù)綌?shù)據(jù)采集主機(jī),攝像頭數(shù)據(jù)通過GMSL傳輸給視頻分流卡、分流卡將數(shù)據(jù)轉(zhuǎn)發(fā)給ECU的同時(shí)傳輸?shù)街鳈C(jī),由主機(jī)對(duì)數(shù)據(jù)進(jìn)行轉(zhuǎn)碼和存儲(chǔ)。毫米波雷達(dá)和智能攝像頭的目標(biāo)數(shù)據(jù)通過CAN/ETH總線傳輸?shù)綌?shù)據(jù)采集主機(jī),組合慣導(dǎo)數(shù)據(jù)通過RS422/CAN/ETH傳輸?shù)綌?shù)采主機(jī);主機(jī)上運(yùn)行采集軟件將所有傳感器數(shù)據(jù)進(jìn)行同步采集和存儲(chǔ),并提供必要的顯示功能。
- 傳感器安裝位置及視場校驗(yàn)
傳感器和采集設(shè)備選型完成后,根據(jù)采集平臺(tái)數(shù)模和傳感器數(shù)模對(duì)傳感器安裝位置和視場角進(jìn)行校驗(yàn),從而使傳感器更好地發(fā)揮性能。實(shí)現(xiàn)對(duì)采集平臺(tái)360°范圍內(nèi)的視覺圖像信息、激光雷達(dá)點(diǎn)云信息采集,減少采集系統(tǒng)盲區(qū)。
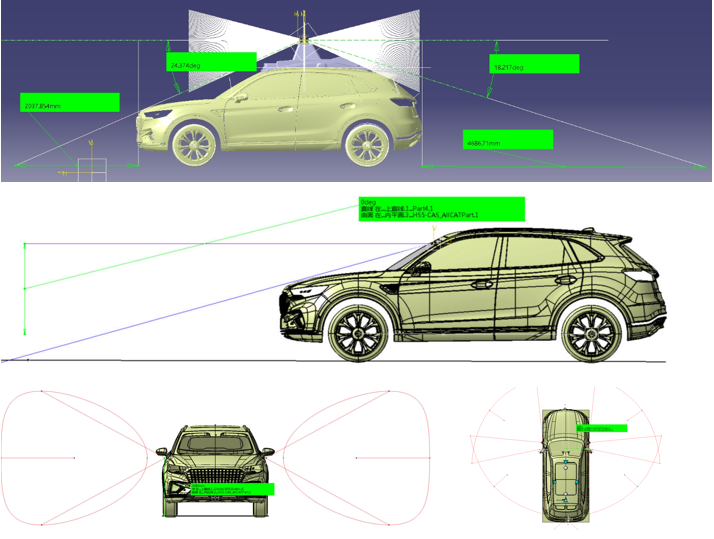
圖.傳感器安裝位置和視場校驗(yàn)
- 支架設(shè)計(jì)
為了保證傳感器的安裝位置和角度,需要設(shè)計(jì)傳感器支架;主要包括激光雷達(dá)支架、攝像頭支架、天線支架、后備箱設(shè)備支架等。同時(shí),為了保證支架安裝時(shí)的位置和角度,還需要設(shè)計(jì)支架安裝用的定位工裝。
- 前視攝像頭支架
- 周視攝像頭支架
- 環(huán)視攝像頭支架
- 固態(tài)激光雷達(dá)支架
- 補(bǔ)盲雷達(dá)支架
- 后備箱設(shè)備支架
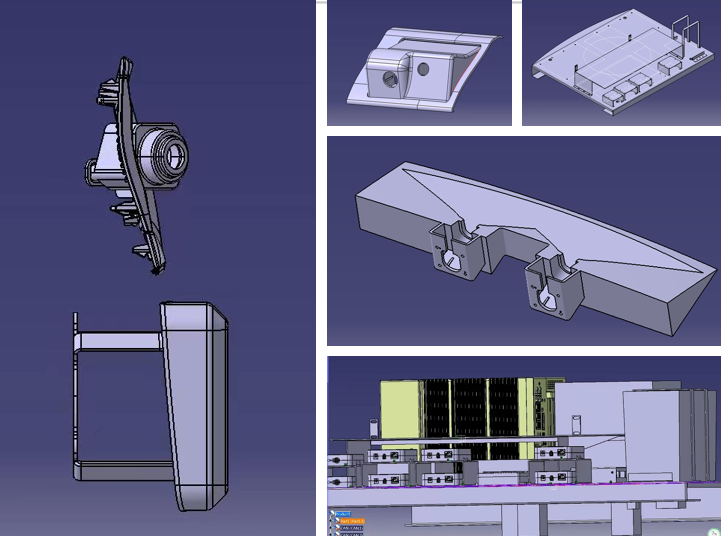
圖.傳感器和設(shè)備支架
- 設(shè)備安裝和調(diào)試
支架設(shè)計(jì)并制作完成后,就可以開始進(jìn)行采集平臺(tái)電氣改裝;需要給各傳感器、采集主機(jī)和信號(hào)接口設(shè)備供電并獲取傳感器的輸出信息。需要計(jì)算整個(gè)系統(tǒng)的總功率,選擇合適的電源線束、保險(xiǎn)盒、繼電器和系統(tǒng)開關(guān)以及電源管理設(shè)備。
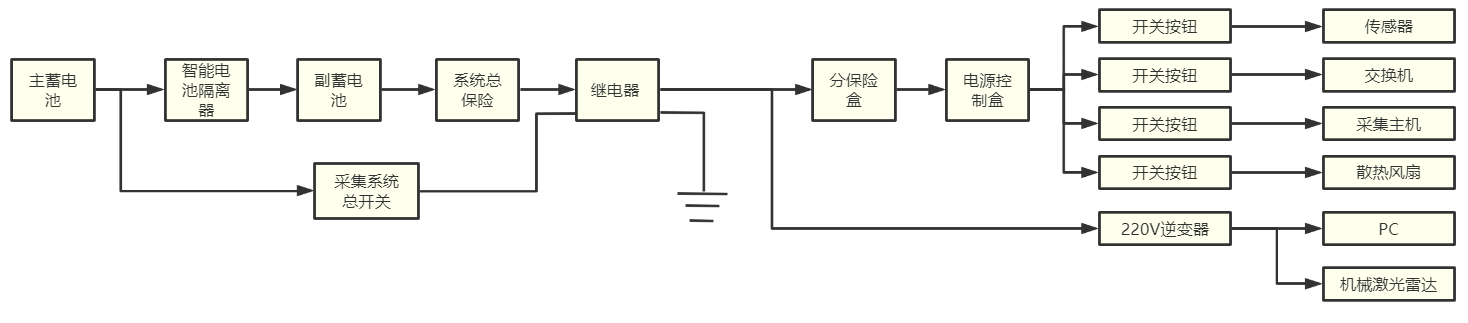
- 采集系統(tǒng)電源改裝
電源系統(tǒng)需要加裝智能雙電池隔離器和副電池來保證電源系統(tǒng)的穩(wěn)定性;另外還需要加裝繼電器、保險(xiǎn)盒、開關(guān)按鈕等附件。
- 視頻信號(hào)線、激光雷達(dá)信號(hào)線、毫米波雷達(dá)信號(hào)線、慣導(dǎo)線束、CAN信號(hào)線束布置
- 傳感器及支架安裝
- 采集主機(jī)及顯示終端安裝
- 上電調(diào)試
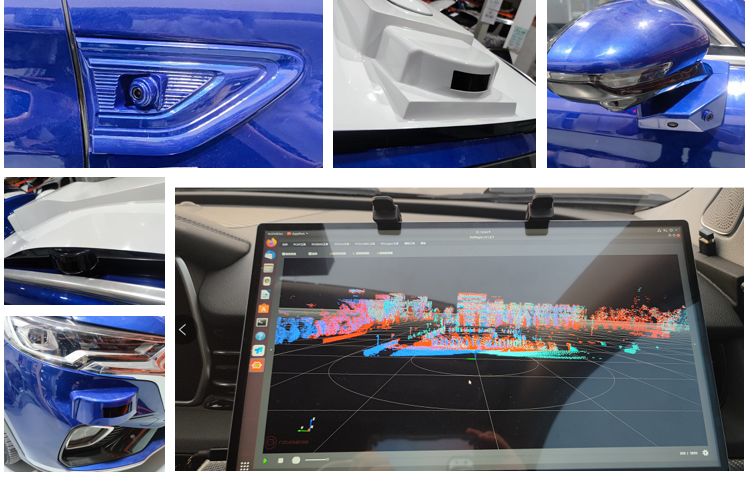
圖.傳感器安裝和調(diào)試
- 傳感器標(biāo)定
傳感器標(biāo)定是自動(dòng)駕駛數(shù)據(jù)采集非常重要的部分,也是多傳感器融合的基礎(chǔ),自動(dòng)駕駛首先需要通過標(biāo)定來確定各傳感器之間的坐標(biāo)關(guān)系和各傳感器與整車坐標(biāo)系之間的轉(zhuǎn)換關(guān)系。
傳感器標(biāo)定主要分為單傳感器標(biāo)定和傳感器之間的標(biāo)定。單傳感器標(biāo)定主要包括攝像頭標(biāo)定、激光雷達(dá)標(biāo)定和慣導(dǎo)標(biāo)定;傳感器之間的標(biāo)定主要包括攝像頭與攝像頭標(biāo)定、攝像頭與激光雷達(dá)標(biāo)定、激光雷達(dá)與激光雷達(dá)標(biāo)定。
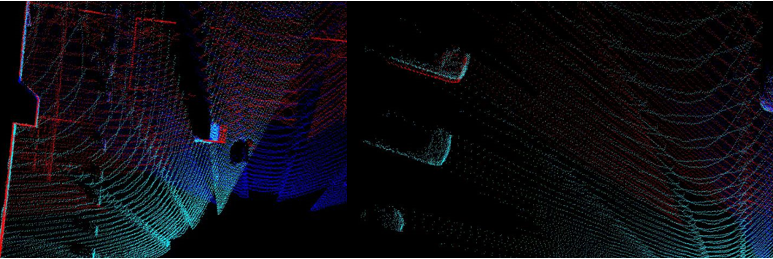
圖.激光雷達(dá)標(biāo)定
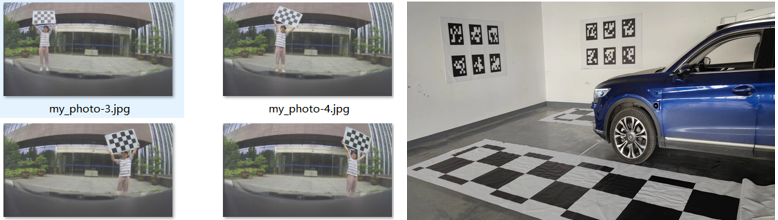
圖.攝像頭標(biāo)定
- 時(shí)間同步
由于每個(gè)傳感器都有自己的時(shí)間戳,為了保證各傳感器的時(shí)間同步,需要對(duì)傳感器和采集系統(tǒng)授時(shí)。整個(gè)系統(tǒng)由組合慣導(dǎo)獲取GPS時(shí)間,并對(duì)時(shí)間同步服務(wù)器授時(shí);然后由時(shí)間同步服務(wù)器通過PTP網(wǎng)關(guān)給激光雷達(dá)和采集主機(jī)授時(shí),使整個(gè)系統(tǒng)使用同一個(gè)時(shí)間源(GPS時(shí)間);同時(shí),時(shí)間同步服務(wù)器輸出trigger信號(hào)去觸發(fā)攝像頭,控制攝像頭的曝光時(shí)刻,從而實(shí)現(xiàn)所有傳感器的數(shù)據(jù)同步。
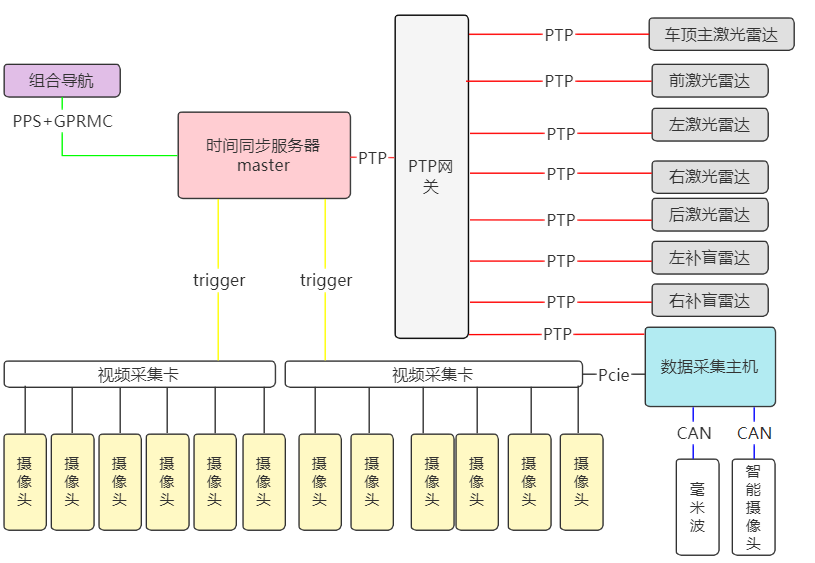
圖.時(shí)間同步
總結(jié)
北匯信息不僅提供完整的路試數(shù)據(jù)采集硬件和軟件,也可根據(jù)用戶需求提供專業(yè)化的工程服務(wù),包括硬件定制化配置安裝,路試采集軟件工程調(diào)試開發(fā),為用戶提供一站式解決方案,方便用戶進(jìn)行后續(xù)的自動(dòng)駕駛算法驗(yàn)證。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13684瀏覽量
166150
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
IOT數(shù)據(jù)采集平臺(tái)的功能特點(diǎn)
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
友思特應(yīng)用 多接口的智駕無憂:GigE相機(jī)在自動(dòng)駕駛數(shù)據(jù)采集系統(tǒng)的穩(wěn)定應(yīng)用
工控數(shù)據(jù)采集平臺(tái)是什么?
標(biāo)貝數(shù)據(jù)采集標(biāo)注在自動(dòng)駕駛場景中落地應(yīng)用實(shí)例

康謀技術(shù) |深入探討:自動(dòng)駕駛中的相機(jī)標(biāo)定技術(shù)

未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
地平線開啟港交所IPO,加速高階自動(dòng)駕駛新征程
康謀方案 | 自動(dòng)駕駛數(shù)據(jù)采集與測試方案
智駕數(shù)據(jù)采集平臺(tái)搭建之多傳感器聯(lián)合標(biāo)定






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論