 工業機器人精度測量方案——GTS激光跟蹤儀
工業機器人精度測量方案——GTS激光跟蹤儀
隨著工廠智能化轉型的深入,“無人工廠”、“黑燈工廠”不斷涌現,工廠車間“少人化”、“無人化”,取而代之的是大量工業機器人的應用,在此背景下,如何確保工業機器人空間位置精度,保障其準確運行變得十分關鍵。
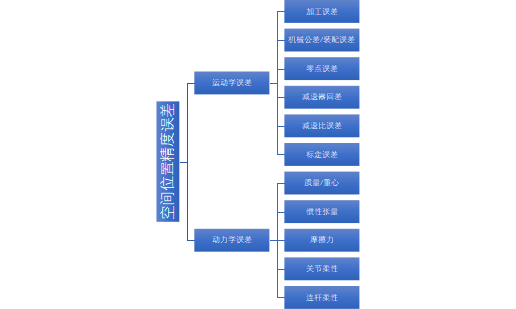
工業機器人空間位置精度誤差主要分為運動學誤差和動力學誤差。運動學誤差主要包含加工誤差、機械公差/裝配誤差、零點誤差、減速器回差、減速比誤差、標定誤差等;動力學誤差主要包含質量/重心、慣性張量、摩擦力、關節柔性、連桿柔性等。
六軸工業機器人系統本質上是一種半閉環的控制結構,系統只能精確控制關節伺服電機位置,而電機位置與機器人末端執行器位姿之間關系通過運動學確定。理論運動學模型與實際模型之間不可避免存在誤差,因此需要通過標定提高機器人的空間絕對位置精度。
中圖儀器推出GTS激光跟蹤儀+RobotMaster軟件為工業機器人空間絕對位置精度測量標定和性能檢測提供高效可行的解決方案。
標定時,通過機器人的連桿理論長度、各關節旋轉方向、機器人零點狀態、各關節理論減速比這四項參數建立機器人理論運動學模型,讓機器人運行30-50個關節角坐標點位,激光跟蹤儀記錄機器人法蘭盤末端坐標。RobotMaster軟件通過不斷迭代計算,修正機器人運動學模型直至達到最優狀態,將最優運動學模型修正至機器人系統,機器人空間絕對位置精度即可得到一定的提升,標定后空間絕對位置精度相對標定前可提升3~15倍左右。
RobotMaster軟件還可以按照《ISO 9283工業機器人性能規范及其實驗方法》對機器人在位置、姿態、軌跡等方面進行性能檢測,檢測內容包括14大項:
—機器人位姿準確度和位姿重復性—多方向位姿準確度變動—距離準確度和距離重復性—位置穩定時間—位置超調量—位姿特性偏移—互換性—軌跡準確度和軌跡重復性—重復定向軌跡準確度—拐角偏差—軌跡速度特性—最小定位時間—靜態柔順性—擺動偏差
助力先進制造,提升工業機器人運動精度,中圖儀器GTS激光跟蹤儀+RobotMaster套件為您提供新的選項!
-
測量
+關注
關注
10文章
4774瀏覽量
111136 -
工業機器人
+關注
關注
91文章
3352瀏覽量
92562
發布評論請先 登錄
相關推薦
大尺寸部件安裝精度測量:GTS激光跟蹤儀的解決方案


使用激光跟蹤儀提升碼垛機器人精度


GTS激光跟蹤儀USMN聯合組網應用-精確到微米的大空間尺度測量


激光跟蹤儀測出來的是什么?GTS激光跟蹤儀全方位測量能力解析

創想激光焊縫跟蹤系統攜手新松機器人 實現鋼結構自動化焊接



激光跟蹤儀:大型結構件測量的重要工具







 工商網監
工商網監
評論