 旭日,從地平線升起——地平線旭日X3派開箱試用
旭日,從地平線升起——地平線旭日X3派開箱試用
1_緣起:2022年6月14日,旭日X3派機器人開發板正式發布。看了發布會的視頻,立刻決定,淘寶拍下第一塊旭日派,看看時間,6月15日凌晨2點。

2_開箱驗貨:第一塊旭日X3派到手,迫不及待拆開瞅瞅。

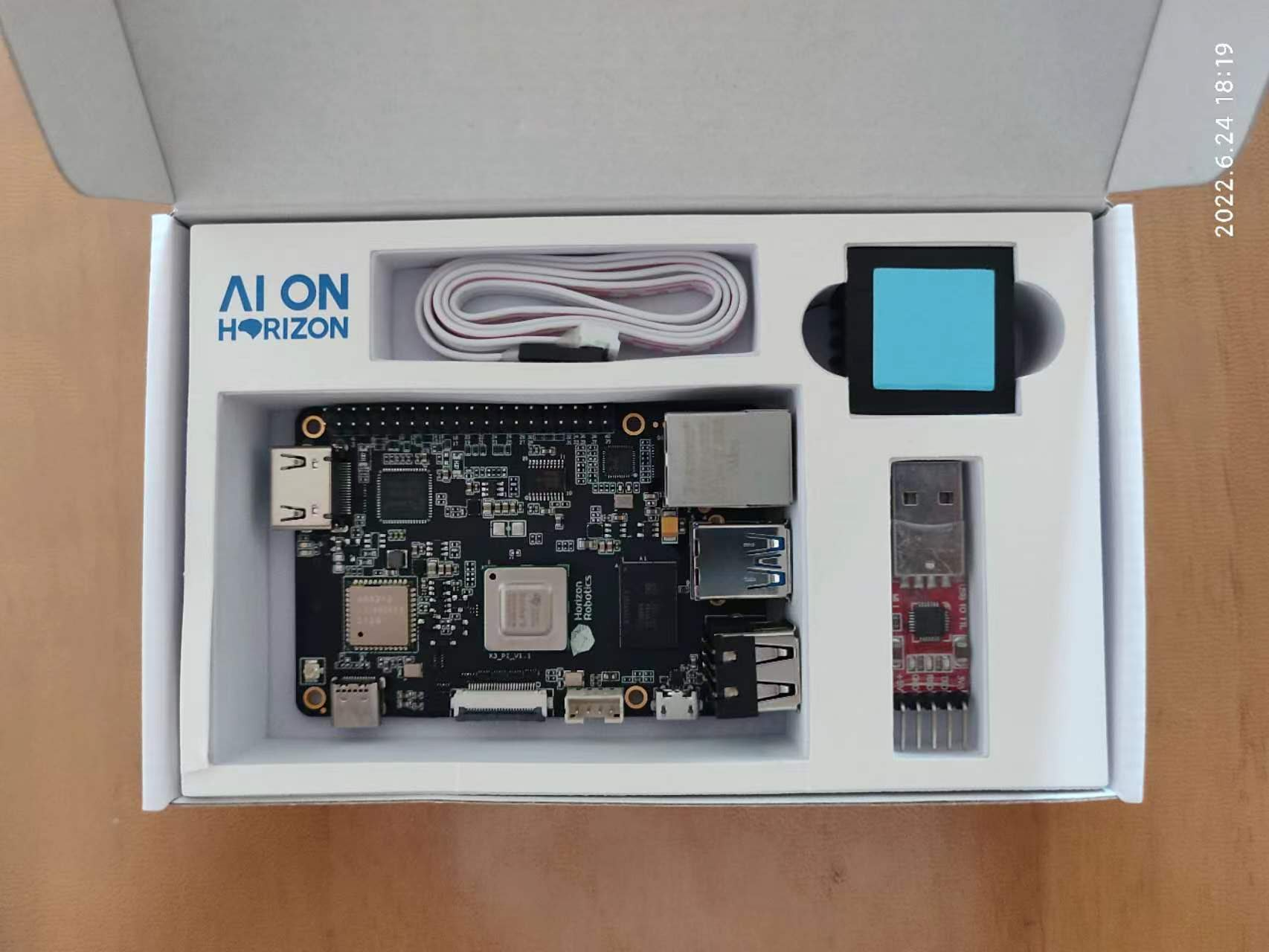
3_準備工作,先準備好元器件:旭日X3派,電源線(5V3A),TF卡(16G),讀卡器,攝像頭組件,串口通訊模塊,顯示屏(器),HDMI線,外帶一瓶可樂

4_開始刷機,先下載工具軟件和鏡像文件:
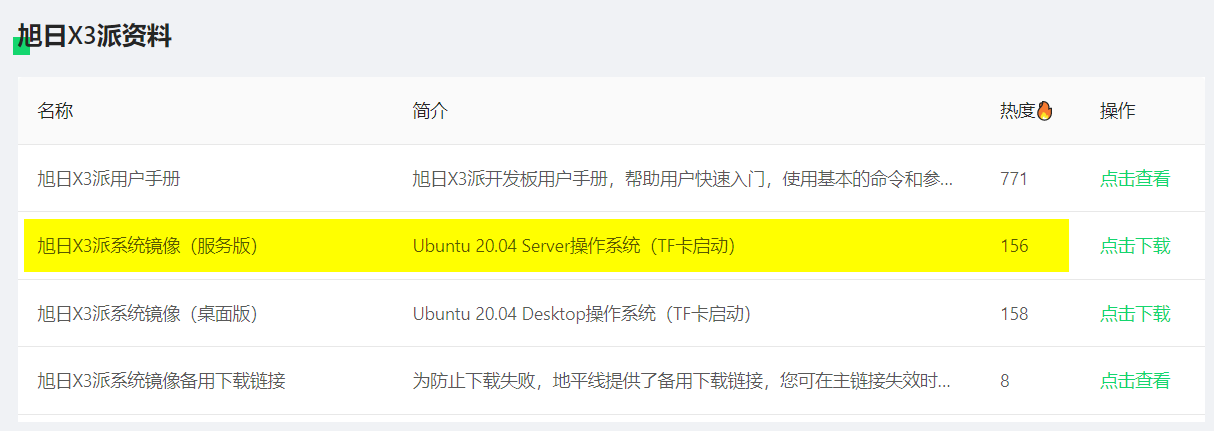
① 系統鏡像文件:https://developer.horizon.ai/resource
系統鏡像文件有“服務版”和“桌面版”,由于旭日X3芯片不支持GPU硬件加速,因此使用Ubuntu Desktop版本(桌面版)時,可能會因CPU渲染圖形桌面而造成系統負載過大,如對系統性能有較高要求,推薦使用不帶圖形桌面的Ubuntu Server版本(服務版)。下載后解壓,獲得系統鏡像文件system_sdcard.img。
② 下載安裝燒錄工具:https://developer.horizon.ai/resource
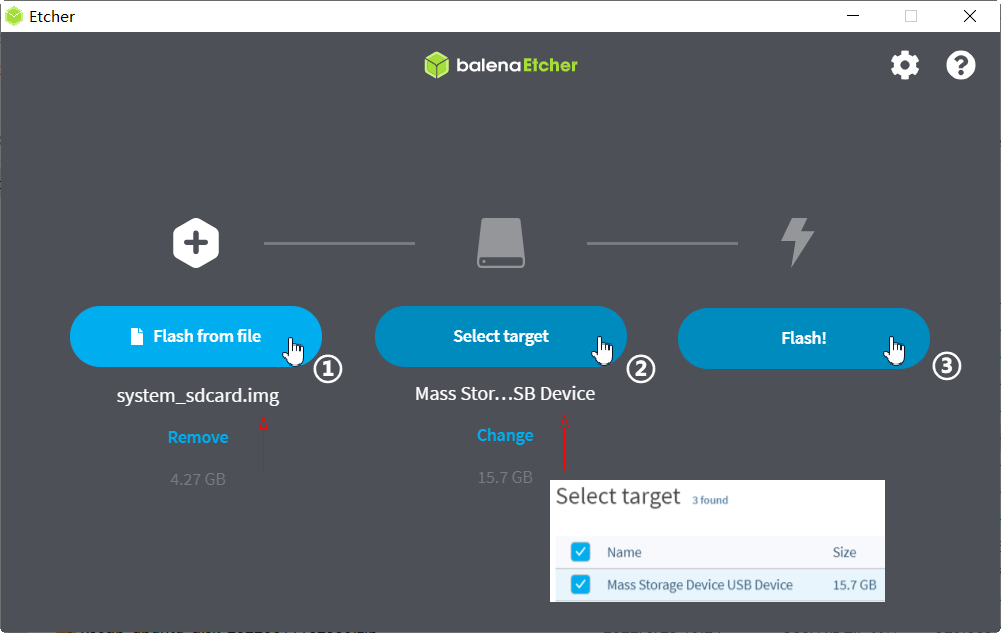
燒錄工具官方推薦balenaEtcher、rufus等第三方PC工具,用于一鍵式制作TF啟動盤,同樣可以在地平線“文檔中心”下載,個人比較喜歡balenaEtcher的界面。

③ 燒錄系統:電腦插入TF卡,打開balenaEtcher軟件,第一步選擇鏡像文件,第二步選擇目標存儲設備(TF卡),第三步Flash一下
④ 插入TF卡:系統啟動盤制作完成后,取出TF卡,將TF卡插入旭日X3開發板。
5_串口調試:
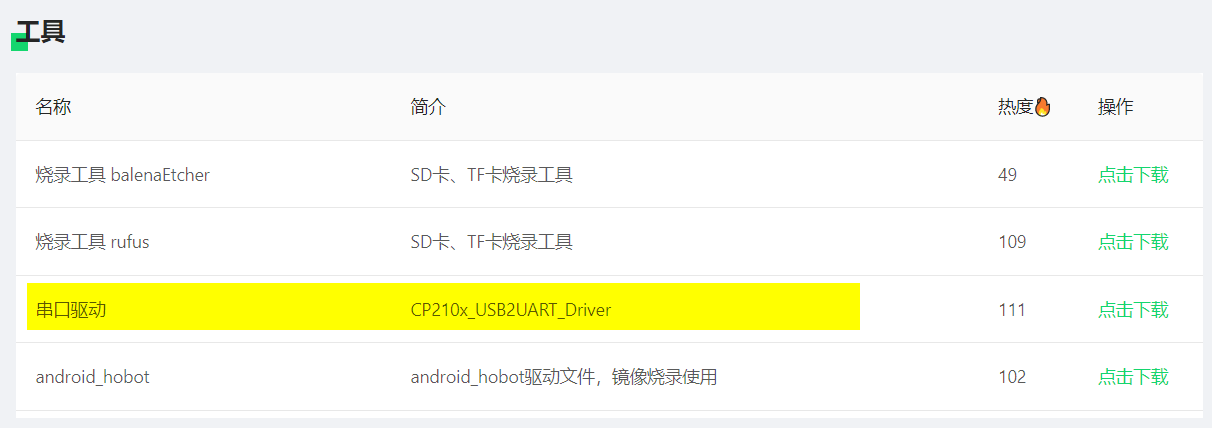
① 下載安裝串口驅動(系統可以自動識別串口的略過):串口驅動程序可在地平線“文檔中心”下載。
② 接線:將串口模塊接線端插入旭日派開發板串口通訊接口,一端插入電腦USB口,檢查電腦硬件,確認已經識別到串口端口號(本機為COM7)。
③ 下載安裝串口調試工具mobaXterm https://mobaxterm.mobatek.net/download.html
運行串口調試工具mobaXterm→USB插入串口模塊→單擊“Session”→單擊“Serial”→選擇端口“COM7”→選擇波特率“921600”→板卡供電→輸入用戶名和密碼(sunrise)
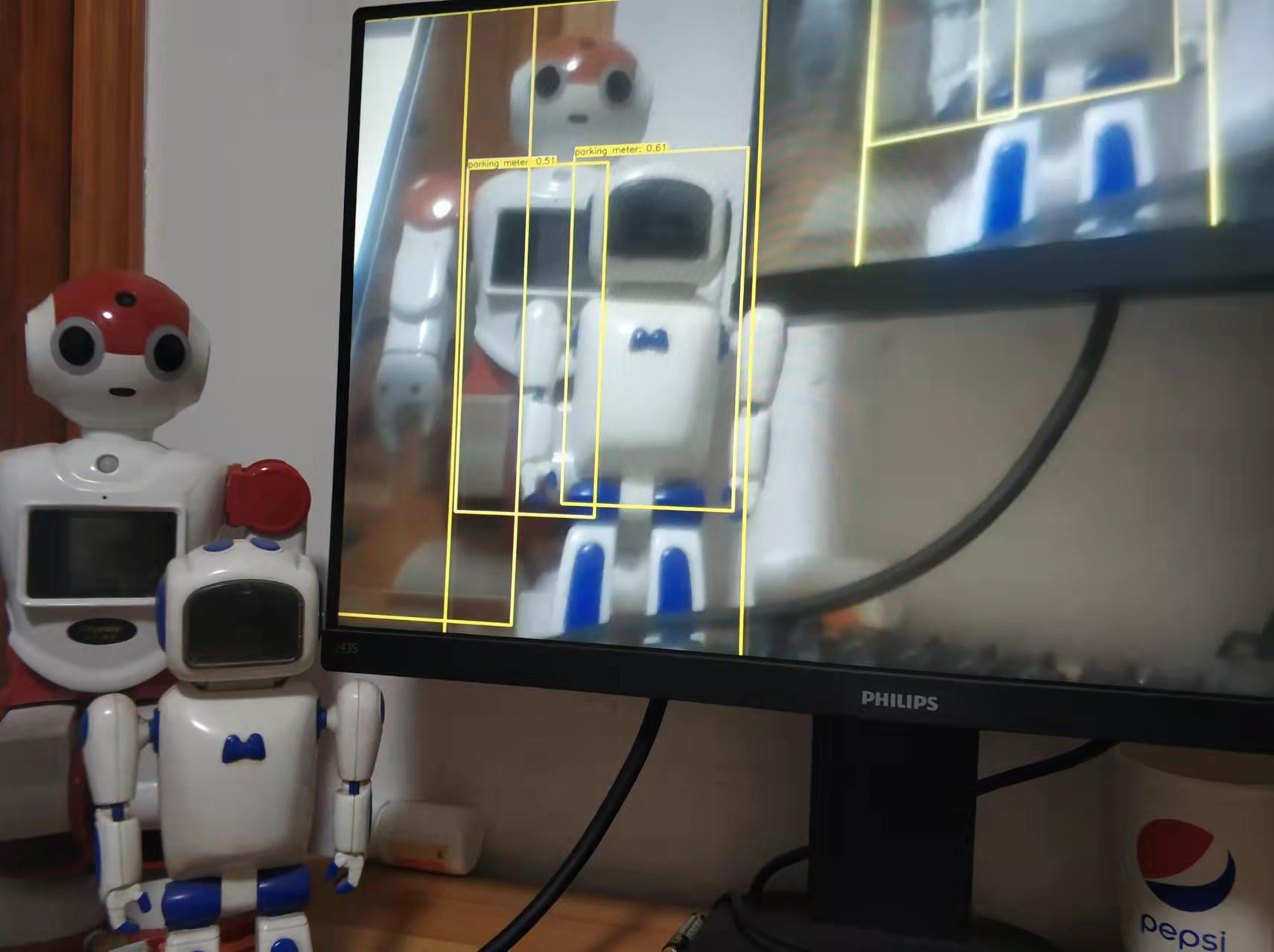
6_Hello World,旭日X3的Hello World其實可以非常special:
① 將攝像頭模組通過FPC排線接到開發板MIPI CSI接口上,接線時注意,FPC排線藍色標識向上,連接兩端接口;
② 通過HDMI線纜連接開發板和顯示器;
③ 輸入以下命令行:
sunrise@ubuntu:~$ cd /app/ai_inference/03_mipi_camera_sample/
sunrise@ubuntu:/app/ai_inference/03_mipi_camera_sample$ sudo python3 ./mipi_camera.py
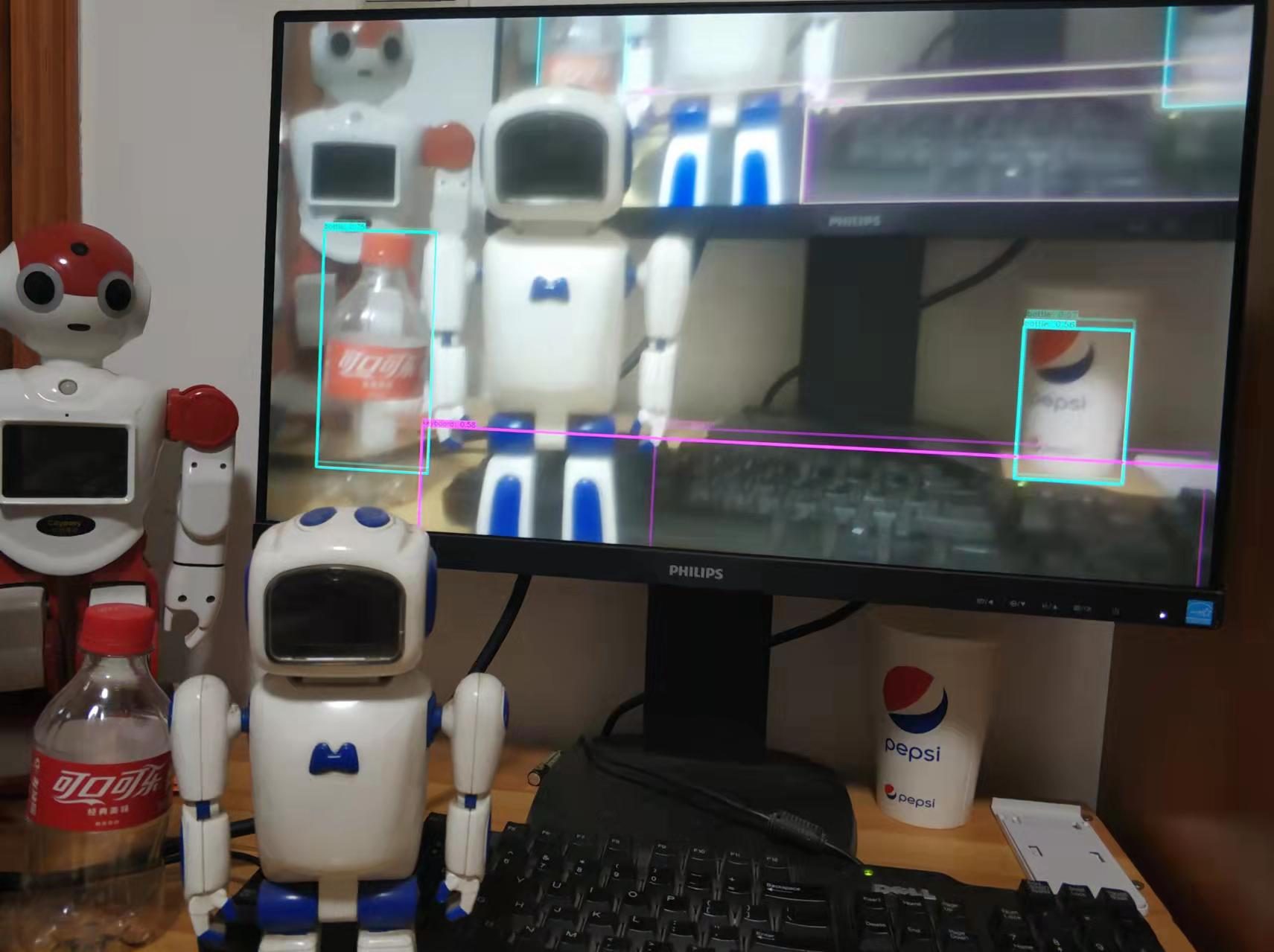
我的可樂瓶子輕松識別出來了,但是兩臺Robot沒有識別出來,再動動攝像頭,終于找到我的Robot,識別為“Parking meter”,我發現還真有點像。

7_路邊的坑,千萬不要踩:
開機大吉,其實都是安慰,還有許多莫名其妙的坑,旭友要提防,比如使用舊的TF卡,我在最初實驗的過程中,其實好多次都是不成功的,原因是......
原作者:David988
原鏈接:詳見地平線開發者社區
-
嵌入式
+關注
關注
5071文章
19026瀏覽量
303502
發布評論請先 登錄
相關推薦
地平線征程家族出貨量突破700萬
地平線榮獲比亞迪“最佳合作伙伴獎”
智駕科技企業地平線登陸港交所
ETAS支持地平線征程6 AUTOSAR版本發布
地平線成功通過港交所聆訊,即將登陸港股市場
智駕科技企業地平線通過港交所聆訊 IPO進入倒計時







 工商網監
工商網監
評論