") 汽車智能車燈控制系統(tǒng)的設計
汽車智能車燈控制系統(tǒng)的設計
智能車燈控制系統(tǒng)是現(xiàn)代轎車的發(fā)展的必然趨勢,本文以單片機為核心,實現(xiàn)智能自動控制汽車前大燈的控制系統(tǒng),當夜晚兩車會車時,系統(tǒng)能通過光檢測輸入模塊察看對面車道的行駛車輛,根據(jù)對面車道的行駛車輛的有無自動關閉和開啟遠光燈,從而大大減少事故的發(fā)生。
一、智能車燈系統(tǒng)控制方案
本系統(tǒng)采用STC89C52為控制核心芯片,本芯片價格便宜,功能完全滿足本系統(tǒng)的需要。系統(tǒng)采用的控制開關電路由遠光燈開關控制,開啟遠光燈的同時也就打開了控制開關電路。對面車道上行駛的汽車開啟的遠近燈光可被光敏傳感器捕獲,并向STC89C52單片機發(fā)送有效電信號,單片機根據(jù)光敏傳感器采集到的信號自動啟動“調(diào)光 控制輸出電路”自動變?yōu)榻狻?刂品桨溉鐖D1所示。
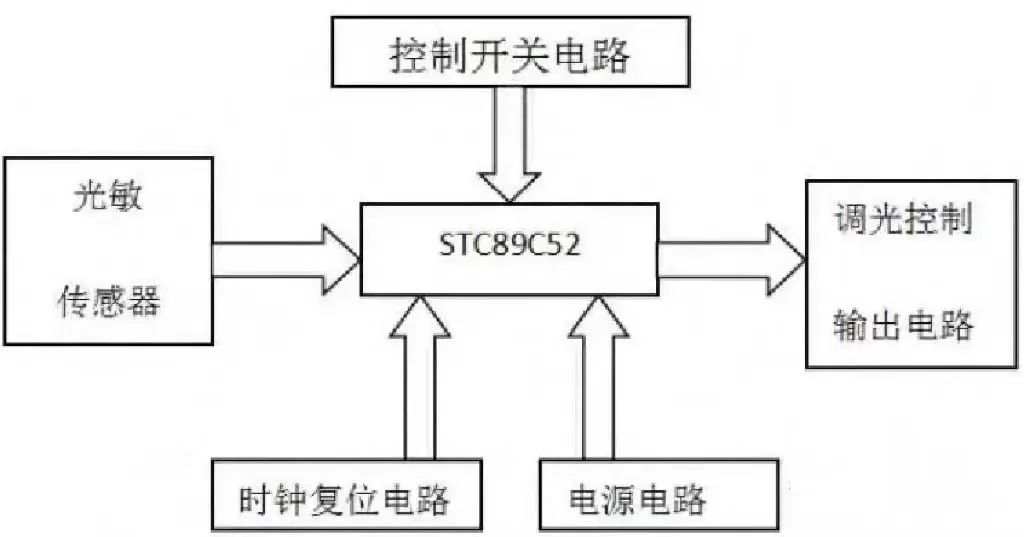
圖1 系統(tǒng)控制方案圖
二、智能車燈系統(tǒng)的硬件設計
本智能車燈系統(tǒng)采用的是STC89C52單片機,該單片機是由STC公司生產(chǎn)的一種低功耗、高性能CMOS8位微控制器,該單片機有40個引腳,具有8K字節(jié)系統(tǒng)可編程Flash存儲器。系統(tǒng)的硬件包括晶振復位電路、光敏傳感器電路、調(diào)光控制輸出電路等組成。其晶振復位電路如圖2所示。
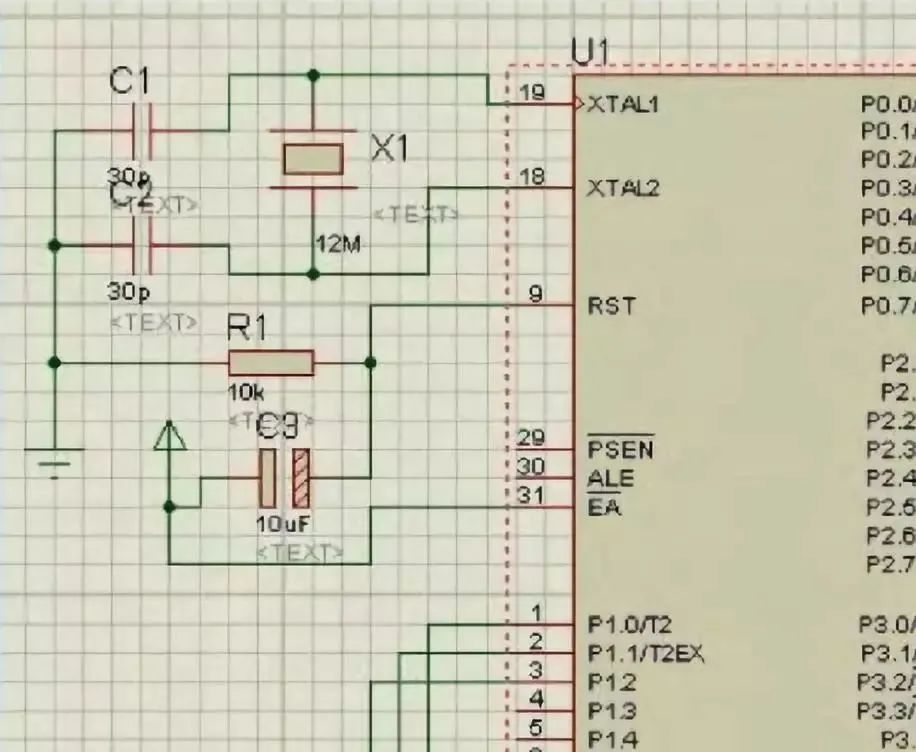
圖2 晶振復位電路
1.光敏傳感器電路的設計
在夜晚,當兩車相遇時,遠光燈的照度是比較低的,尤其在偏離主軸位置后因照射角度的變化,照度還會下降,探測環(huán)境光線較弱,所以遠光光敏傳感器的選取著重的是其在微弱光線下的靈敏度和線性度,加之各種車燈的發(fā)射光譜均處于可見光范圍,故本設計采用光電池作為光敏傳感器,它的光譜響應特性曲線與人眼光譜光視效率曲線接近,對可見光頻率的光譜響應度好,同時光電池感光面積 大,適合用于對低照度的測量。弱光檢測電路采集的信號比較微弱,往往采集的光信號和環(huán)境的噪聲的級別處于相同的量級,為了能夠順利可靠的采集到光信號,本文以LOGl00作為前置放大電路,可有有效的采集的弱光信號,具體的檢測電路如圖3所示。
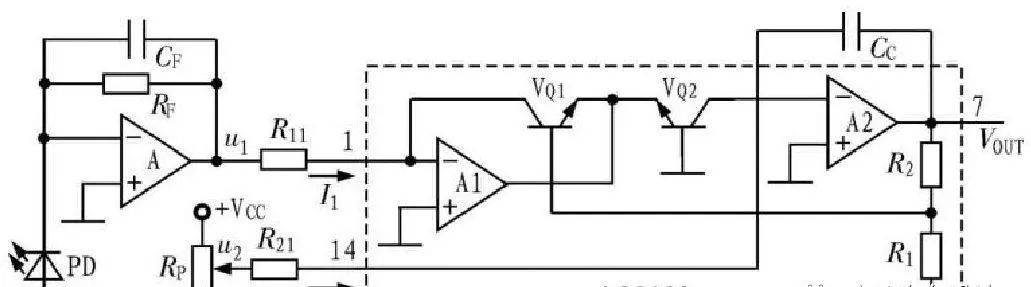
圖 3 光敏傳感阿奇檢測電路
2.調(diào)光控制輸出電路
調(diào)光控制輸出電路最終是要控制遠近燈的切換。而單片機的工作電壓一般是在 5V甚至更低,電流也是毫安級別的,是無法直接驅(qū)動遠近燈光的切換的。因此本系統(tǒng)采用繼電器驅(qū)動作為功率驅(qū)動。具體的控制電路如圖4所示。
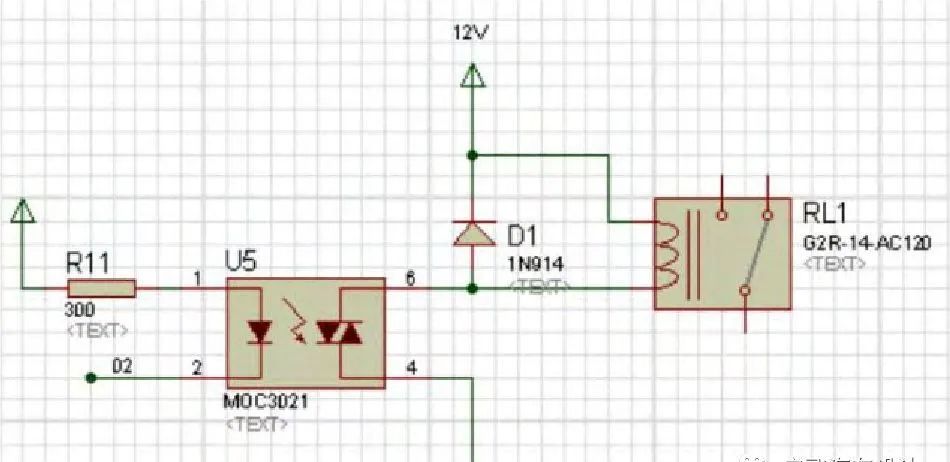
圖 4 調(diào)光控制輸出電路
三、系統(tǒng)的軟件設計
在設計完硬件電路圖后,本文還設計了與硬件電路圖相配套的軟件,系統(tǒng)軟件的設計思路如圖 5 所示。在系統(tǒng)上電后,光敏傳感器即開始檢測光信號,當檢測到光信號后,單片機控制繼電器,把遠光燈轉(zhuǎn)換成近光燈。
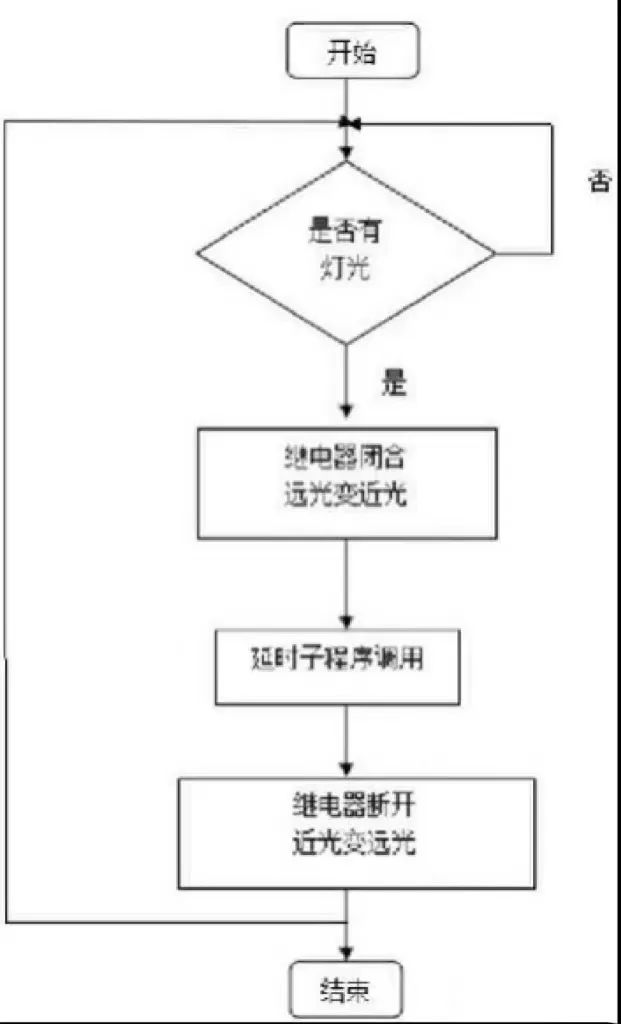
圖5 系統(tǒng)軟件流程圖
四、系統(tǒng)的驗證
為了驗證系統(tǒng)的可靠性和穩(wěn)定性,本文首先檢查系統(tǒng)的硬件,如系統(tǒng)的元器件安裝是否錯誤,各個連接線是否松動等。
其次檢查系統(tǒng)的軟件,根據(jù)系統(tǒng)的原理和系統(tǒng)的硬件結(jié)構(gòu),是否做到軟硬結(jié)合。然后對系統(tǒng)進行運行軟硬件的調(diào)試:硬件上的傳感器采集到信號后看在軟件的上位機上是否能夠顯示。
經(jīng)過運行調(diào)試,系統(tǒng)能夠快速根據(jù)光敏傳感器采集到的信號切換遠光燈和近光燈,系統(tǒng)運行工作是穩(wěn)定可靠的,一旦道路上運行的車輛都采用了本系統(tǒng),每次會車是都能夠自動控制遠光燈切換成近光燈,可以有效的避免駕駛員不及時切換燈光造成的安全事故,未來的市場潛力是巨大的。
-
控制系統(tǒng)
+關注
關注
41文章
6417瀏覽量
110092 -
車燈
+關注
關注
1文章
201瀏覽量
16532
發(fā)布評論請先 登錄
相關推薦
立功科技ISD智能交互車燈技術方案

極海正式發(fā)布首款GALT61120汽車前燈LED矩陣控制芯片, 引領汽車照明智能未來 ?
極海半導體發(fā)布全新GALT61120芯片,引領智能照明新紀元
建筑智能控制系統(tǒng)的特點
汽車大燈中擎耀智能控制器在車燈智能化配置下的創(chuàng)新與分析
溫嶺新城簽約晶合智能車燈控制系統(tǒng)基地項目
極海發(fā)布基于汽車音樂律動氛圍燈的G32A1445汽車通用MCU
淺談智能照明控制系統(tǒng)在綜合管廊中的設計應用與研究
智能燈光控制系統(tǒng)怎么布線 智能燈光控制系統(tǒng)的組成
智能控制系統(tǒng)的主要類型有哪些?
問界M9領銜!廣州車展正式拉開智能車燈競爭大幕
智能車的運動控制系統(tǒng)介紹
基于Agent的智能控制系統(tǒng)的設計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論