 科瑞特(CRT)3~6軸拋光運動控制示教系統
科瑞特(CRT)3~6軸拋光運動控制示教系統
一、CRT3-6軸控制系統功能及應用簡介
系統采用全示教操作方式,降低用工門檻,大屏觸摸操作,傻瓜化、上手快;
硬件可選3~6軸。多軸聯動,輕松實現3軸螺旋插補,3~6軸直線插補;
大存儲空間,內置512個程序自由切換,每個程序默認200個動作步序;
可針對客戶做定制開發以滿足特殊需求;
適用于拉絲、打磨、拋光等工藝,可用于手機殼毛邊打磨、不銹鋼餐具拋光、表殼拋光等。
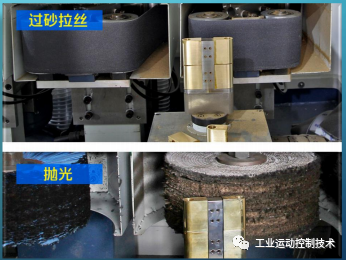
過砂拉絲拋光
二、系統操作界面功能介紹
1、主界面
手動操作、參數設置、程序瀏覽、運行畫面,四個模塊組成。
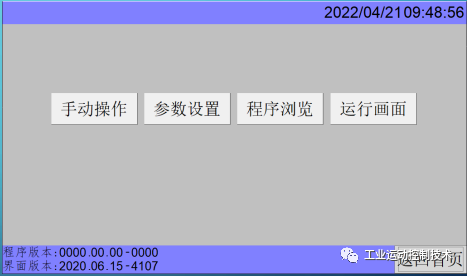
主界面
2、手動界面
實現各軸手動操作和IO點的狀態顯示。
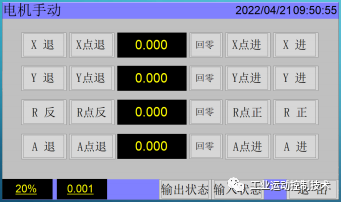
電機手動
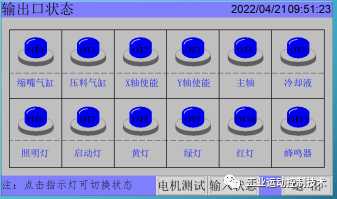
輸出狀態

輸入狀態
3、運行狀態界面
運行狀態監控,整機啟停操作。

運行狀態
4、參數設置界面
基本運動參數、各軸硬件參數、系統功能配置參數、用戶權限參數。
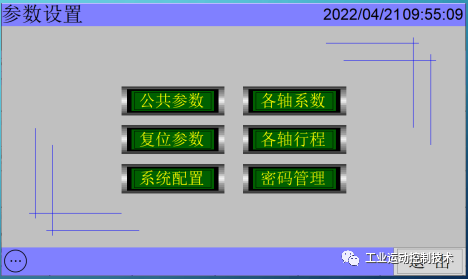
參數設置
5、程序編輯界面
程序選擇與切換,動作步序的編輯;
基本動作:軸單動、直線聯動、圓弧聯動、IO動作、延時、循環,支持自由定制。

程序示教編輯
基本動作選項:軸單動、直線聯動、圓弧聯動、IO動作、延時、循環,支持自由定制。

基本動作選項
6、絕對坐標定位
3軸絕對坐標螺旋插補示教。
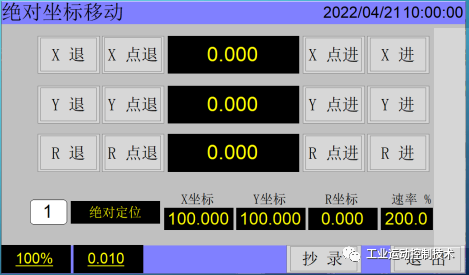
絕對坐標移動
7、自定義循環示例
20個計數器自定義循環,支持嵌套。

自定義循環
CRT示教控制系統具備強大的運算能力、極高的輸出頻率、大容量可擴展的數據儲存空間,完全符合各種專用機及標準機發揮更高性能、更高效率的應用需求。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制
+關注
關注
4文章
1011瀏覽量
122628
發布評論請先 登錄
相關推薦


什么是拖動示教?機器人拖動示教方式分析
多變的特點,滿足制造業日益增長的復雜性要求。 機器人拖動示教,就是操作員可以直接拖著機器人各關節,運動到理想的姿態,記錄下來。協作機器人是較早具有該功能的系統。這種

基于導納控制的機器人拖動示教原理和實現步驟
(Admittance)模型描述。導納模型類似于彈簧和阻尼器的組合,用來描述機器人對外部力和運動的響應。機器人拖動示教系統DMC600M? ? ??1. 原理? ? ??導納模型:機器
焊接機器人示教模式怎么設置
在現代制造業中,焊接機器人廣泛應用于提高生產效率和焊接質量。而焊接機器人示教模式的正確設置,是確保自動化焊接過程精確執行的重要環節。今天創想智控焊縫跟蹤系統小編帶大家了解焊接機器人示

VPLC系列機器視覺運動控制一體機在五軸聯動點膠上的應用
始終精確對準工件的特定位置,即使在工件或工具自身旋轉時也能保持恒定的相對姿態和角度。
在運動控制過程確保C軸在校準時保持零點位置。通過機械平臺的水平方向角度校準來標定A軸,并進行旋轉中
發表于 07-29 14:29
機器視覺控制軸運動原理是什么?
了運動控制和機器視覺系統的結合,并降低了它們的開發難度和開發成本。在設計這種系統時,了解目前的技術發展、方法以及開發工具會對您的工作提供很大的幫助。 ? ? ??機器視覺
基于S3C2440和專用DSP的嵌入式四軸運動控制器
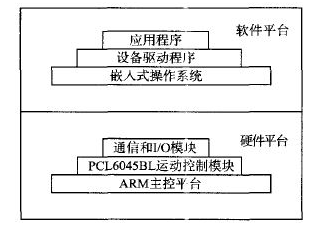
PCL6045BL是一種新型專用DSP運動控制芯片,它具有強大的數據處理能力和較高的運行速度,可以實現高精度的多軸伺服控制。為解決精密制造對低成本、可移植性強的通用型多
發表于 05-03 10:44
?503次閱讀
基于RK3568核心板的工業示教器解決方案
難的問題,且自帶的監控功能可提供安全的使用保障。“示教器”是一種手持裝置,廣泛應用于機器人控制系統中。它通過通訊電纜連接控制柜或運動

LabVIEW的六軸工業機器人運動控制系統
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。La
發表于 12-21 20:03
基于導納控制的機器人拖動示教原理和實現步驟
基于導納控制的機器人拖動示教是一種常用的機器人控制策略,它允許人與機器人直接互動,實現自然、直觀的控制。在導納





 工商網監
工商網監
評論