") 三坐標(biāo)測(cè)量機(jī)由哪些系統(tǒng)組成?
三坐標(biāo)測(cè)量機(jī)由哪些系統(tǒng)組成?
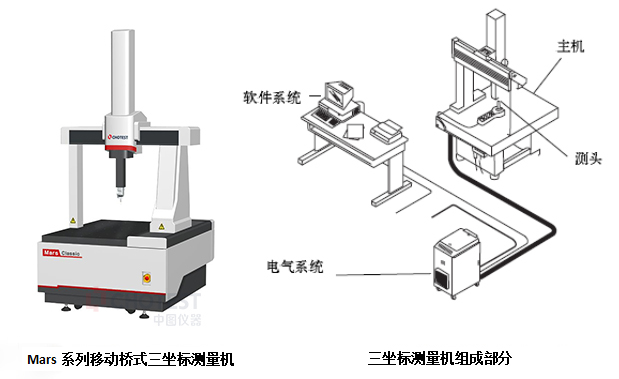
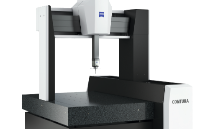
三坐標(biāo)測(cè)量機(jī)將被測(cè)件放入測(cè)量范圍內(nèi),可以準(zhǔn)確測(cè)出測(cè)件表面的點(diǎn)在空間的三個(gè)坐標(biāo)位置的數(shù)值,經(jīng)過三坐標(biāo)數(shù)學(xué)計(jì)算的方法得出其形狀、位置公差及其他幾何量數(shù)據(jù)。三坐標(biāo)測(cè)量機(jī)一般由主機(jī)(包括光柵尺)、電氣系統(tǒng)、軟件系統(tǒng)及測(cè)頭組成。
1、主機(jī)
主機(jī)結(jié)構(gòu)分為:
(1)框架,是工作臺(tái)、立柱、橋框、殼體等機(jī)械結(jié)構(gòu)的集合體;
(2)標(biāo)尺系統(tǒng),起決定儀器精度作用;
(3)導(dǎo)軌,實(shí)現(xiàn)三維運(yùn)動(dòng)的重要部分;
(4)驅(qū)動(dòng)裝置,實(shí)現(xiàn)機(jī)動(dòng)和程序控制伺服運(yùn)動(dòng)的功能;
(5)平衡部件,主要用于Z軸框架結(jié)構(gòu)中。主要起平衡Z軸重量的作用,以使Z軸上下運(yùn)動(dòng)時(shí)無偏得干擾,使檢測(cè)時(shí)Z向測(cè)力穩(wěn)定;
(6)轉(zhuǎn)臺(tái)與附件,其中轉(zhuǎn)臺(tái)能使測(cè)量機(jī)增加一個(gè)運(yùn)轉(zhuǎn)運(yùn)動(dòng)的自由度,便于某些種類零件的測(cè)量。
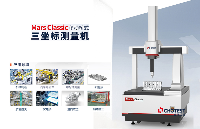
 Mars系列三坐標(biāo)測(cè)量機(jī)
Mars系列三坐標(biāo)測(cè)量機(jī)2、電器系統(tǒng)
電氣控制系統(tǒng)是測(cè)量機(jī)的電氣控制部分。它具有單軸與多軸聯(lián)動(dòng)控制、外圍設(shè)備控制、通信控制和保護(hù)與邏輯控制等;
3、軟件系統(tǒng)
(1)計(jì)算機(jī)硬件部分,三坐標(biāo)測(cè)量機(jī)可以采用各種計(jì)算機(jī),一般有PC機(jī)和工作站等;
(2)測(cè)量機(jī)軟件,包括控制軟件與數(shù)據(jù)處理軟件。這些軟件可進(jìn)行坐標(biāo)交換與測(cè)頭校正,生成探測(cè)模式與測(cè)量路徑,可用于基本幾何元素及其相互關(guān)系的測(cè)量,形狀與位置誤差測(cè)量等。具有統(tǒng)計(jì)分析、誤差補(bǔ)償和網(wǎng)絡(luò)通信等功能;
(3)打印與繪圖裝置,此裝置可根據(jù)測(cè)量要求,打印出數(shù)據(jù)、表格,亦可繪制圖形,為測(cè)量結(jié)果的輸出設(shè)備。
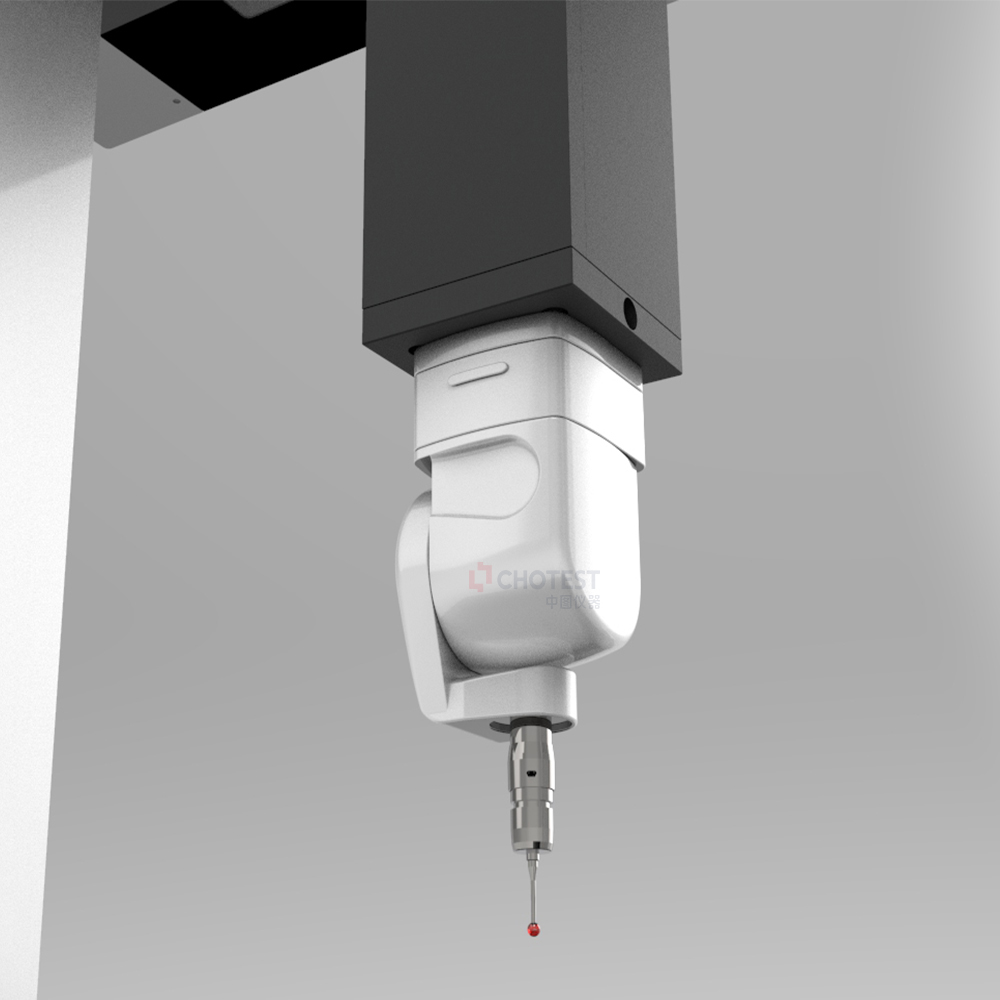
4、測(cè)頭
測(cè)頭即三維測(cè)量的傳感器,它可在三個(gè)方向上感受瞄準(zhǔn)信號(hào)和微小位移,以實(shí)現(xiàn)瞄準(zhǔn)與測(cè)微兩種功能。Mars系列三坐標(biāo)測(cè)量機(jī)測(cè)頭部分:
(1)Pantec 測(cè)座
Pantec eagle head M7.5M8全自動(dòng)旋轉(zhuǎn)測(cè)座,可實(shí)現(xiàn)測(cè)頭在A 軸和B 軸以7.5 度為增量移動(dòng),該測(cè)座具有720個(gè)可重復(fù)定位空間位置,可配置長達(dá)300mm 加長桿,具有高重復(fù)性以及機(jī)械式自動(dòng)連接功能。
(2)Pantec測(cè)頭
Pantec eagle mp touch SF是5方向或6方向操作的觸發(fā)式測(cè)頭。由測(cè)頭本體和可分離測(cè)頭吸盤組成,可以手動(dòng)或自動(dòng)改變測(cè)針的配置而不需要重新定位測(cè)針,在檢測(cè)時(shí),可節(jié)省很多時(shí)間。

-
儀器儀表
+關(guān)注
關(guān)注
5文章
7846瀏覽量
44385
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文解析三坐標(biāo)測(cè)量機(jī)對(duì)智能制造的影響
橋式三坐標(biāo)測(cè)量機(jī)和影像測(cè)量三坐標(biāo)介紹

三坐標(biāo)測(cè)量機(jī)可以測(cè)量哪些材料?
三坐標(biāo)測(cè)量機(jī)的精度如何保證?

三坐標(biāo)測(cè)量機(jī)質(zhì)量性價(jià)比評(píng)估:國產(chǎn)全自主研發(fā)新選擇解析
蔡司三坐標(biāo)測(cè)量機(jī)精確檢測(cè)產(chǎn)品的高度差

蔡司三坐標(biāo)測(cè)量機(jī)系統(tǒng)的基礎(chǔ)認(rèn)識(shí)
國產(chǎn)三坐標(biāo)測(cè)量機(jī)全自主研發(fā),實(shí)現(xiàn)高精度三維尺寸測(cè)量
針對(duì)三坐標(biāo)測(cè)量機(jī)中的精度校驗(yàn)
三坐標(biāo)測(cè)量機(jī)發(fā)展現(xiàn)狀以及三坐標(biāo)國產(chǎn)化的意義

CMM三坐標(biāo)測(cè)量機(jī)的問題解答
蔡司三坐標(biāo)測(cè)量機(jī)安裝調(diào)試

CMM三坐標(biāo)測(cè)量機(jī)的優(yōu)勢(shì)

三坐標(biāo)測(cè)量機(jī)如何精確測(cè)量產(chǎn)品的高度差?
三坐標(biāo)測(cè)量機(jī)最適用于測(cè)量什么?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論