 【文章轉載】車輛動力學及場景建模軟件DYNA4新特性介紹
【文章轉載】車輛動力學及場景建模軟件DYNA4新特性介紹
DYNA4為乘用車和商用車提供各種復雜的仿真模型,包括車輛動力學模型、發動機模型、動力系統模型、電機模型、ADAS傳感器和交通環境模型等。用戶通過DYNA4可以安全高效地進行功能開發和測試驗證,例如可用于開發早期的MIL和SIL仿真環境,或者ECU硬件在環系統(HIL)。基于DYNA4可以實現縱向、橫向以及垂向控制的整車級仿真,包含制動、轉向、主動懸架等。DYNA4還提供豐富的道路、基礎設施及交通環境模型,為駕駛輔助和智能駕駛提供重要的虛擬仿真環境平臺。
DYNA4不僅可以和CANoe無縫集成,而且具有高包容性的外部接口,支持與第三方軟硬件集成,以及與用戶的算法程序集成(Window/Linux)。除了支持傳統ECU的IO接口外,還支持目前熱門的ADAS及智能駕駛集成,實現將駕駛員的駕駛意圖和駕駛行為與DYNA4動力學模型集成驗證,例如智駕的車道線保持LKA功能、路徑規劃、漂移等外部智駕模型等與DYNA4動力學模型集成,支持Window/Linux平臺下的諸多語言環境。
針對不同操作環境,
量身定制對應的許可證形式
>
桌面版Desktop Edition
適合于個人仿真研究以及學習
該許可證面向指定的用戶和局域網內部設備的用戶,需提供電腦用戶及電腦物理信息
>
臺架版Test Bench Edition
適用于個人電腦或測試臺架上的使用,例如硬件在環
該許可證用于測試臺架的設備激活,目前也支持SIL,許可證激活可不綁定于電腦
>
服務器版本Server Edition
適用于大規模仿真、多運算節點的持續測試任務。DYNA4在沒有主界面模式下執行仿真
該許可證可用于項目或團隊的網絡訪問、云端多實例并發的場景
下圖為使用DYNA4服務器版本實現CI/CT車輛控制單元持續集成測試。
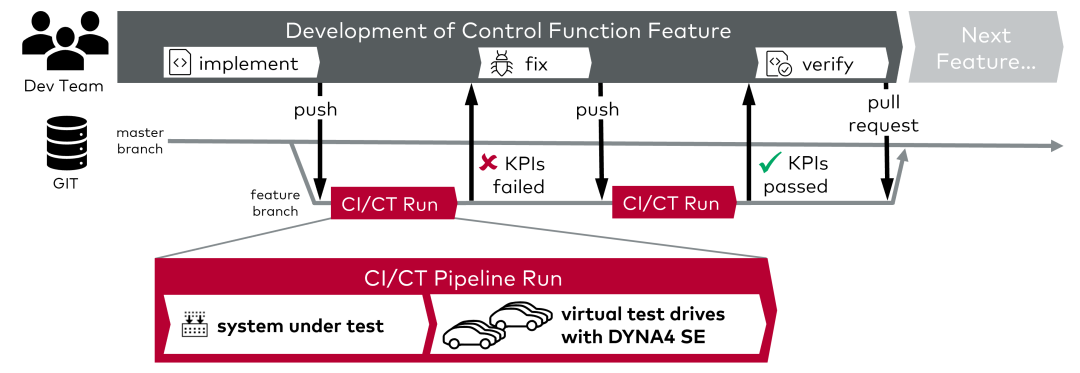
圖1:DYNA4車輛控制單元持續集成測試CI/CT測試
DYNA4模型仿真目標在之前基礎上,增加了Linux Executable 以及FMU Linux等的運行模式,具體如下:
>
Support of Windows 11
>
Support of CANoe 16
>
Support of Linux FMU for exporting DYNA4 Simulation Models
>
Support of Concurrent SimWorkbench 2021.2-1
>
Support of DYNA4 Linux Executable
全新界面以及參數自檢功能
>
全新的模型參數界面
模型與模型參數的結構樹更加清晰,容易理解
緊湊顯示項目中已激活的以及可用的測試場景和模型配置
在模型配置和場景視圖列表中,雙擊便可靈活方便地選擇并激活所需的模型和場景
>
報錯自檢功能
智能提醒錯誤的信息及對應錯誤位置,例如模型參數缺失、執行目標未曾編譯等
在之前的日志視圖基礎上,增加了整體潛在的問題的概述
提供快速修復的功能選項

圖2:DYNA4全新的模型參數統一界面以及報錯自檢功能
后處理功能提升
后處理的結果可以快速概覽以及分析,全新的視角視圖
通過仿真結果界面的條件篩選可以方便快速選擇所需的內容
在信號瀏覽視圖里,展開結果文件選擇信號來進行數據分析,方便實現多文件的結果比較
結果文件(MDF格式)不需要打開MATLAB即可進行分析
MDF文件記錄DYNAanimation動畫里面的信號

圖3:功能豐富、操作便捷的后處理界面
新增場景庫車輛以及新能源汽車示例
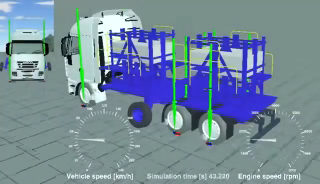
新增Tesla Model X的純電動汽車傳動和動力學模型示例,可生動表達傳動時功率能量流的動畫示意;同時場景里增加諸多3D的整車數模,如下:
Tesla Model X 2016
VW Arteon R Shooting Brake 2021
VW ID Buzz 2023
VW ID Space Vizzion 2023
VW Tiguan R 2021
VW ID.3 2020, VW ID.4 2020
International LTTractor Truck 2018,
Forage Harvester,
Krampe Big Body 650 Carrier Farm Trailer 2017
VW T6 2016
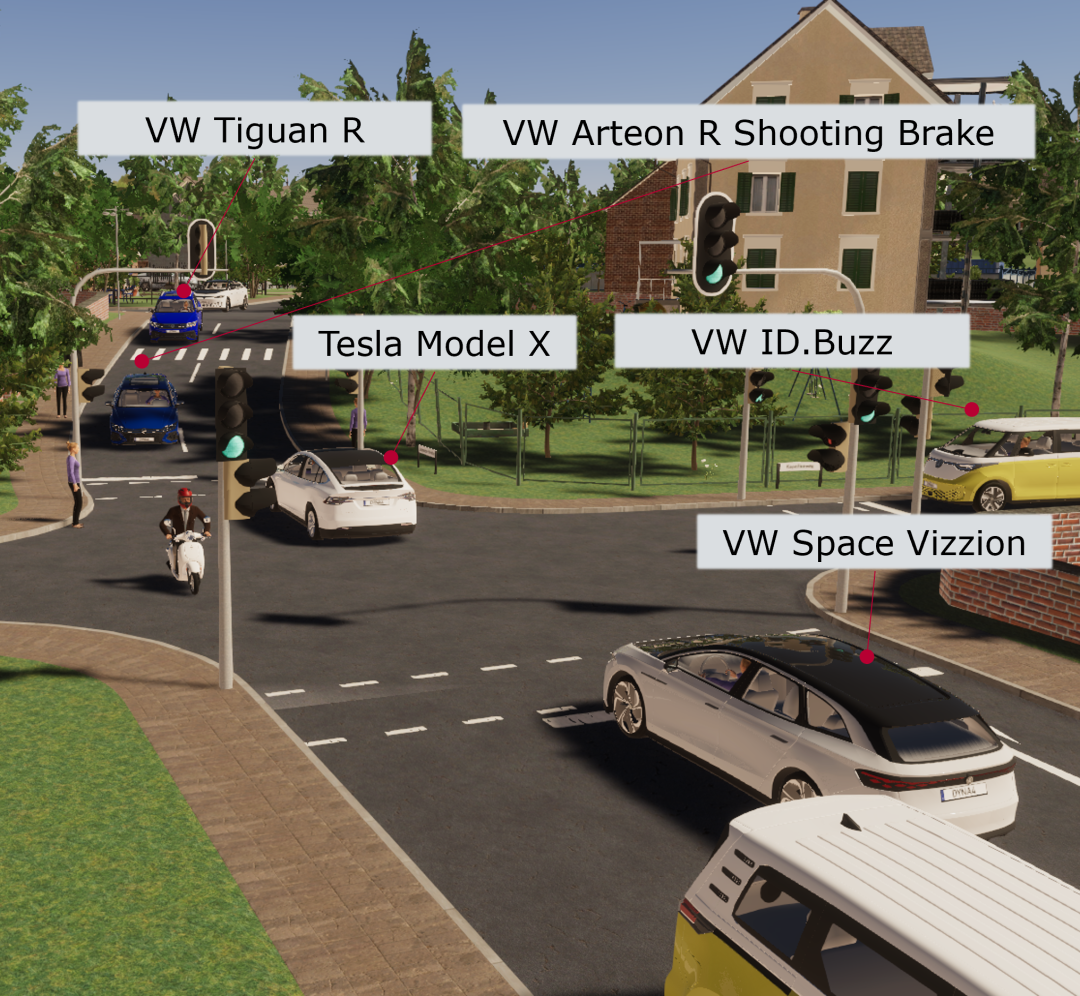
圖4:新增的場景及3D整車數模
可視化傳感器Visible Object Sensor
分類語義分割的功能
>
可視化傳感器
可以輸出邊界框的二維像素坐標
可以使用對象類別而不僅是單個對象進行分割
分割后的圖像仍保持相機圖像畸變的狀態
>
Visible Object Sensor和Lidar Sensor檢測到的物體類別可以為每個傳感器定制,即可以切換甚至過濾掉指定的類別
>
Visible Object Sensor和Ground Truth Sensor可提供所檢測到物體的理想化3D邊界框信息
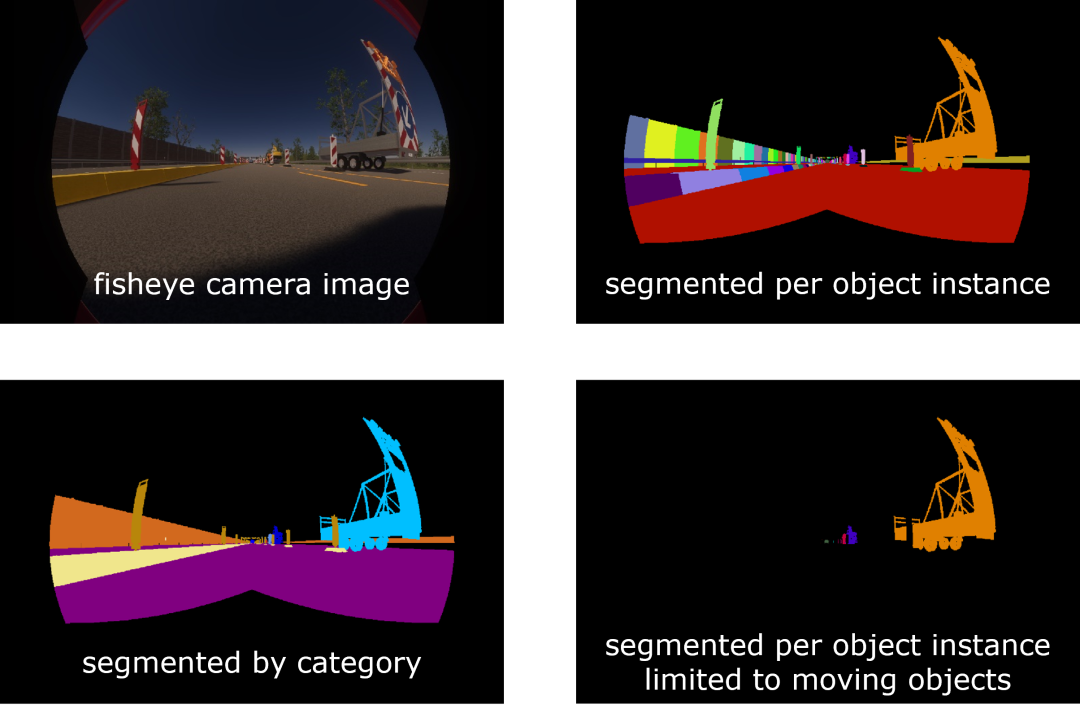
圖5:含圖像畸變的不同語義分割形式下的類別分割情況
高包容性的外部接口
DYNA4不僅可以和CANoe無縫集成,而且具有高包容性的外部接口,支持與第三方軟硬件集成,以及與用戶的算法程序集成(Window/Linux)。除了支持傳統ECU的IO接口外,還支持目前熱門的ADAS及智能駕駛集成,實現將駕駛員的駕駛意圖和駕駛行為與DYNA4動力學模型集成驗證,例如智駕的車道線保持LKA功能、路徑規劃、漂移等外部智駕模型等與DYNA4動力學模型集成,支持Window/Linux平臺下的諸多語言環境。
下圖為將DYNA4里的變量接口與CANoe連接,實現了在CANoe里實時控制DYNA4車輛的縱向和橫向控制。圖中1處為DYNA4底層Simulink與CANoe的接口,2處為CANoe里橫縱向控制的面板設置。如果需要ECU的其他信號接口,可以方便地從DYNA4底層Simulink Bus里拉出所需的信號。
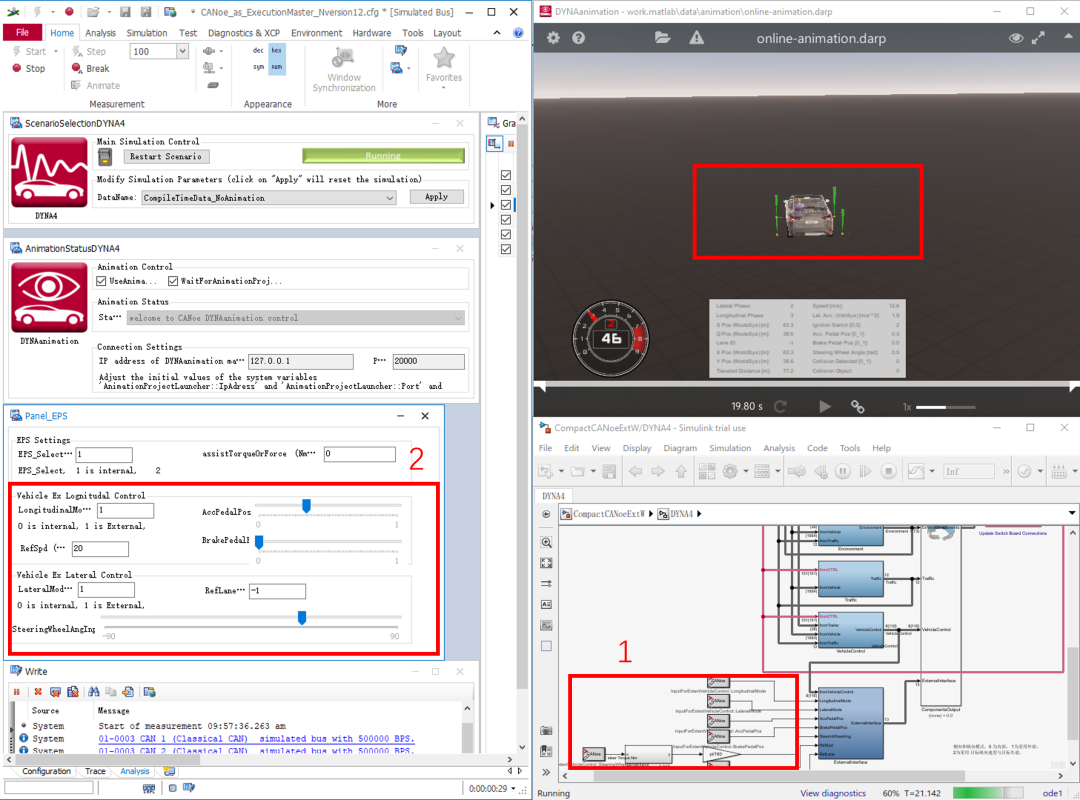
圖6:DYNA4底層Simulink與CANoe的接口及在CANoe里實現車輛橫縱向控制
DYNA4除了CANoe等諸多平臺接口支持外,還支持標準的模型交換接口Functional Mock-up Interface(FMI)的形式,可支持Window & Linux下的運行。
以Linux下的C++語言調用為例。首先在模型里拉出所需的接口,然后在DYNA4主界面選擇“FMU Linux Export”模式,然后進行編譯,再將編譯結果拷貝到Linux電腦。下圖為Ubuntu 20.04環境下,C++語言程序調用DYNA4的仿真情況。
如需其他語言平臺,可以在GitHub里下載對應FMU調用的開源程序。例如,C++語言的開源程序為FMI4cpp,Python程序為PythonFMU,Java程序為FMI4j。整體來說,Linux下調用DYNA4是較為簡潔方便的,且并不需要安裝額外的依賴庫,極大方便客戶的算法與DYNA4的模型進行集成仿真測試。
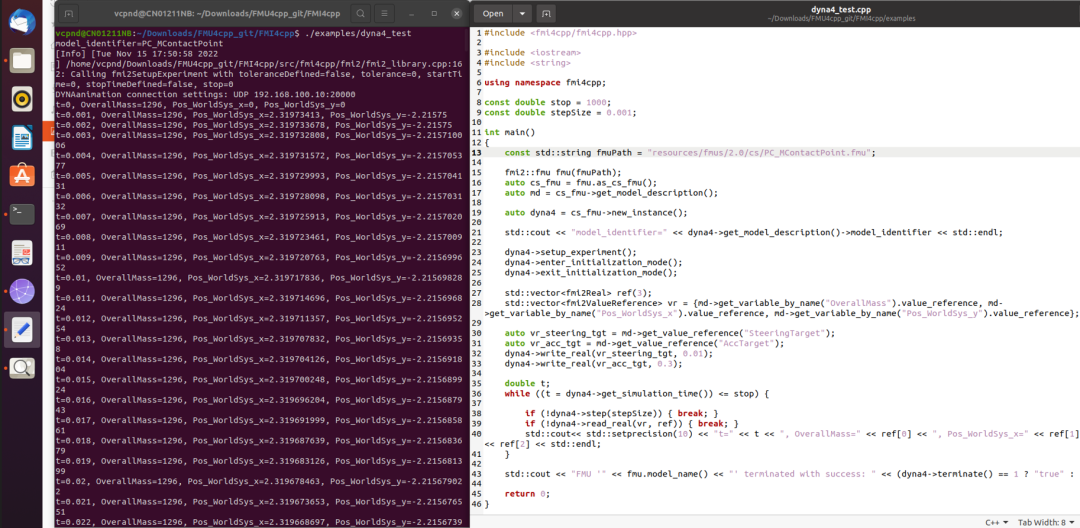
圖7:Ubuntu 20.04環境下,C++語言程序調用DYNA4的仿真情況
外部接口集成的應用舉例
輔助智能駕駛
含有路徑規劃的外部駕駛模型集成
不管是車道保持、還是點對點的路徑規劃智能駕駛,車輛都會去代替/接管駕駛員去進行車輛的駕駛控制。模擬駕駛員對車輛的控制,比較通行的駕駛員算法有MPC(模型預測控制)、LQR(線性二次調節器)及PP(Pure Pursuit)追隨預瞄;這里采用郭孔輝院士在《汽車操縱動力學原理》書籍里的“單點預瞄”的思路,在DYNA4動力學里集成,僅作思路的分享。
DYNA4設置過程如下圖,1處為從車輛里提取出需要的車輛狀態量;2處根據所預設的任意Path,計算車輛位置與目標Path的預瞄點位置和角度的偏差兩個輸出量;3處為根據“單點預瞄”的思路進行部分修改,求得期望的方向盤轉角;4處為對方向盤轉向進行限制,規范其合理的變化速率以及上下限值;5處為將外部的方向盤轉角再輸入給DYNA4整車模型。
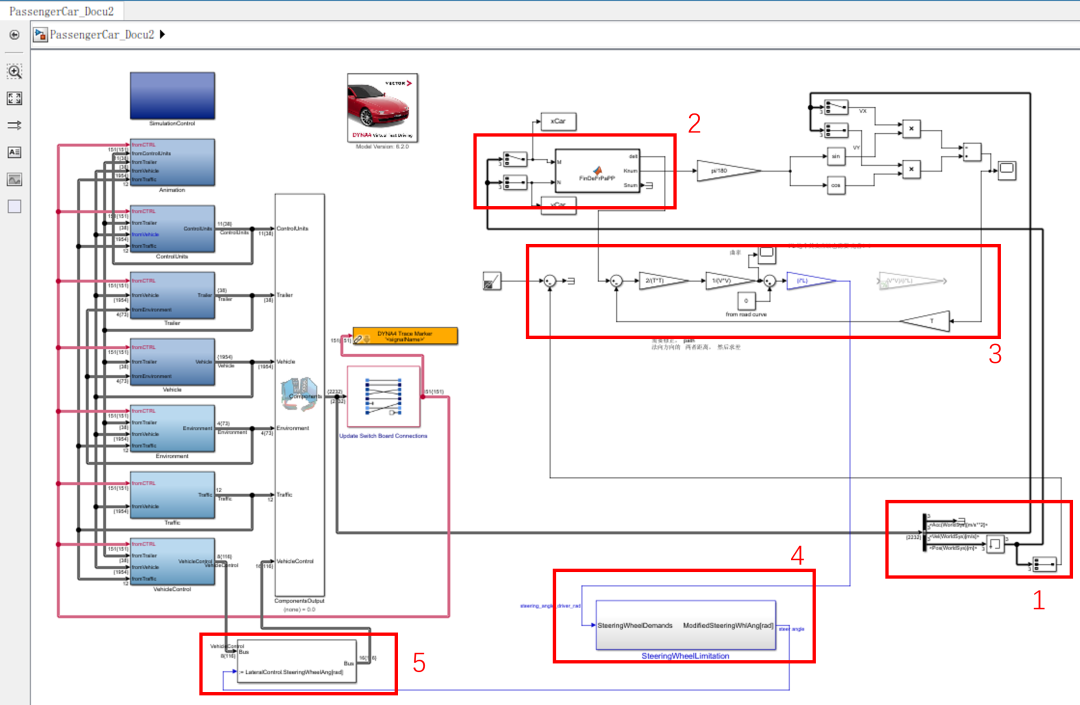
圖8:含有路徑規劃的外部駕駛員智駕算法集成_單點預瞄
路徑追隨的單點預瞄仿真效果如下圖,目標Path路徑為側向偏置2m的水平車道,末端是直徑20m的圓周;車輛的縱向行為是36km/h的縱向勻速運行,采用DYNA4內部閉環控制;可以看出車輛從原點(0,0)處快速地駛入目標路徑,然后在路徑末端進行繞圓運動。考慮預瞄算法的本身會導致一些跟隨的偏離,整體的路徑追隨的效果還是不錯的。這里整體的算法都是在Simulink內部,當然也可以是在其他平臺、其他語言環境下的集成。
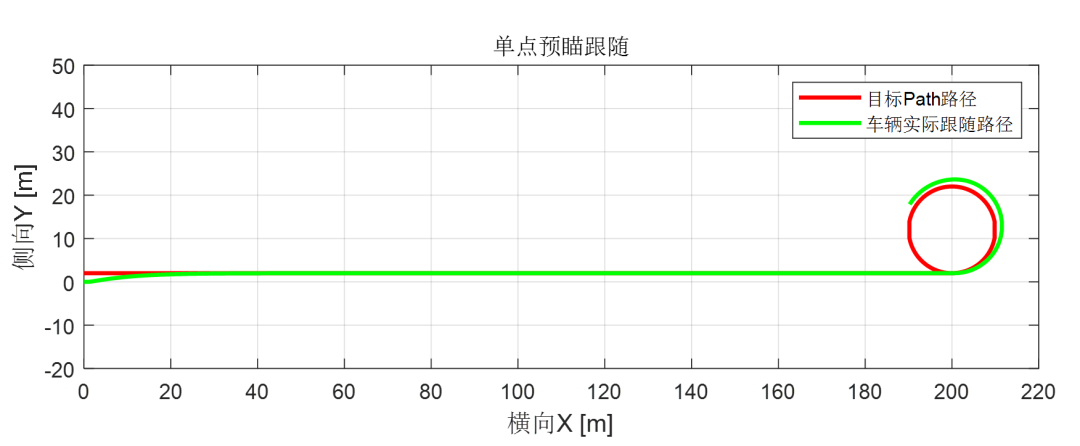
圖9:路徑追隨的單點預瞄效果
助力整車“漂移”外部智駕的集成實現
除了讓車輛按照智能路徑規劃智駕以外,還可以讓車輛實現高難度動作如“漂移”,這應該也是智駕的一種體現。對于更復雜的駕駛員閉環控制算法“漂移”,所對應的控制算法從輸入輸出數量以及整體邏輯,都會相對更復雜些。通過匹配提取DYNA4模型里的輸入輸出接口,可以方便地實現車輛“漂移”的駕駛員模型嵌入。在車輛低附著路面漂移時,車速可以不用過高。通常采用后驅的車進行“漂移”更容易,一般是前輪依然保持附著轉向的能力,而后輪進行滑移。如下圖可以看出,漂移時,前輪與路徑前進方向基本是“平行的”,而后輪基本是滑移狀態,有較大的側偏角,整個車身也是斜的。
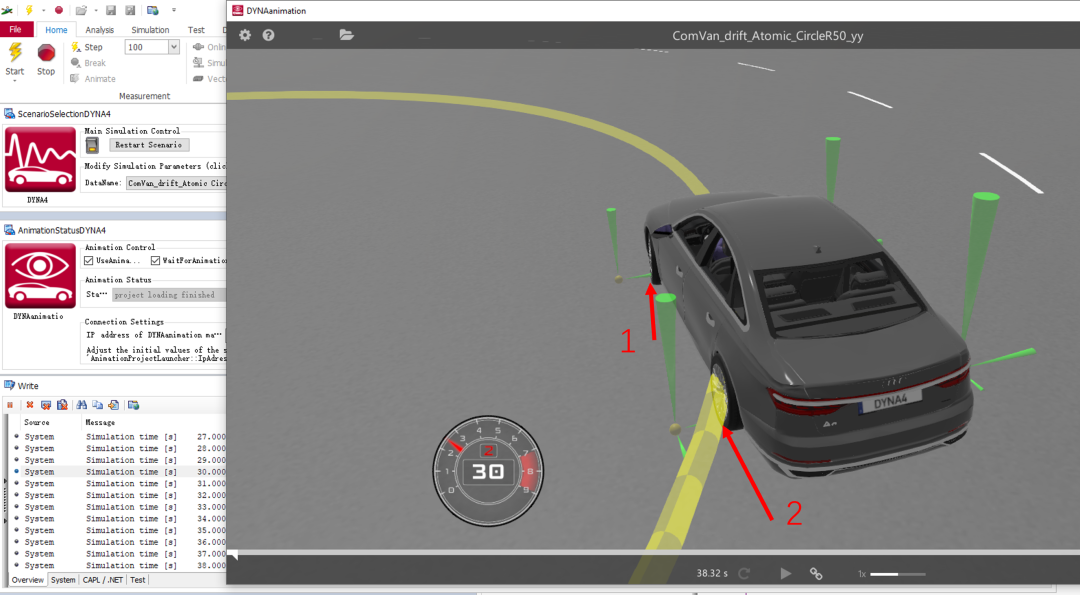
圖10:漂移智駕的外部控制算法集成
上圖是智駕控制算法在DYNA4和CANoe里集成,實現助力漂移算法的驗證,以供參考。控制算法可以在Simulink或CANoe內部,也可以是外部其他形式。當然,不局限于平臺,可在Linux或云端運行部署,且無需安裝諸多額外的依賴庫,極大方便客戶的(智駕)算法與DYNA4的模型進行集成仿真測試。
-
建模軟件
+關注
關注
0文章
6瀏覽量
7069 -
智能駕駛
+關注
關注
3文章
2451瀏覽量
48649
發布評論請先 登錄
相關推薦
“本源悟空”超導量子計算機助力大規模流體動力學量子計算

Simcenter STAR-CCM+車輛外部空氣動力學特性——通過快速準確的CFD仿真加速空氣動力學創新

圓滿收官| Aigtek參展第二屆波動力學前沿與應用學術會議載譽歸來!

自動駕駛聯合仿真——功能模型接口FMI(終)










 工商網監
工商網監
評論