") 斗輪機(jī)無人值守系統(tǒng)的主要功能
斗輪機(jī)無人值守系統(tǒng)的主要功能
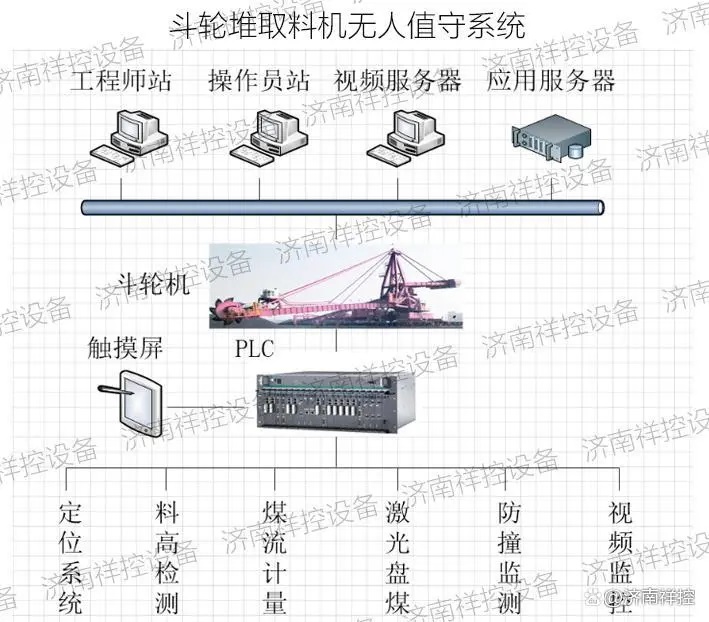
斗輪機(jī)無人值守系統(tǒng)通過激光掃描技術(shù)實(shí)時獲取堆場的信息、斗輪機(jī)的位置和懸臂俯仰角度與回轉(zhuǎn)角度的實(shí)時狀態(tài),通過特定算法,自動化控制斗輪機(jī)的堆取料工作,從而提高堆廠的物料管理水平,達(dá)到降本增效的目的。
下面以煤堆管理為例,來說一說濟(jì)南祥控斗輪機(jī)無人值守系統(tǒng)所具備的主要功能:
厘米級高精準(zhǔn)定位:斗輪機(jī)無人值守系統(tǒng)通過工業(yè)級衛(wèi)星定位技術(shù)、高精度編碼定位、非接觸式回轉(zhuǎn)/俯仰角度檢測等裝置,加上基于RFID技術(shù)的地址碼位置校準(zhǔn)裝置,來實(shí)現(xiàn)定位系統(tǒng)冗余配置,對斗輪機(jī)大車、懸臂俯仰/回轉(zhuǎn)角度實(shí)現(xiàn)厘米級的高精度實(shí)時檢測。
實(shí)時監(jiān)測煤流料高:在斗輪堆取料機(jī)懸臂皮帶上安裝激光掃描裝置,對取料過程進(jìn)行實(shí)時煤流流量檢測,作為取煤恒流量控制調(diào)節(jié)參數(shù);在斗輪堆取料機(jī)尾車皮帶上安裝激光掃描裝置,對堆料/分流過程的實(shí)時煤流流量進(jìn)行檢測,作為自動分流控制調(diào)節(jié)參數(shù);在斗輪堆取料機(jī)懸臂頭部安裝雷達(dá)料位檢測裝置,用于探測煤垛料高,參與全自動堆料時料高控制。
高精度三維模型:在斗輪堆取料機(jī)懸臂懸臂頭部左右兩側(cè)安裝激光掃描裝置,或在封閉煤場頂部安裝激光掃描裝置,對料垛作業(yè)面進(jìn)行實(shí)時激光掃描,實(shí)時測量服務(wù)器完成料垛三維實(shí)時建模,得到料垛高精度三維模型,并作為全自動控制的基礎(chǔ)數(shù)據(jù)。
雙重防撞保護(hù):在斗輪堆取料機(jī)懸臂兩側(cè)分別安裝超聲波障礙物檢測裝置,系統(tǒng)跟據(jù)實(shí)時建立的煤垛模型與斗輪堆取料機(jī)懸臂實(shí)時空間位置,實(shí)時計(jì)算兩者相對位置關(guān)系,當(dāng)位置達(dá)到一定設(shè)定值時,上位機(jī)進(jìn)行預(yù)警,當(dāng)達(dá)到極限值時自動停止旋轉(zhuǎn)并提供報(bào)警,人工確認(rèn)排除后自動恢復(fù)旋轉(zhuǎn),實(shí)現(xiàn)懸臂軟硬雙重防護(hù)。
視頻監(jiān)控:在封閉煤場采用多點(diǎn)位安裝工業(yè)級高清數(shù)字網(wǎng)絡(luò)攝像機(jī),全方位監(jiān)視斗輪機(jī)運(yùn)行狀態(tài)及料場環(huán)境情況,視頻報(bào)警聯(lián)動功能,提高系統(tǒng)安全性。
祥控斗輪機(jī)無人值守系統(tǒng)具有精準(zhǔn)定位、實(shí)時監(jiān)測、三維模型、防撞保護(hù)和視頻監(jiān)控等主要功能,現(xiàn)在已被廣泛應(yīng)用于火電廠、碼頭等物料存儲場所中。
-
三維模型
+關(guān)注
關(guān)注
0文章
49瀏覽量
13102
發(fā)布評論請先 登錄
相關(guān)推薦
漏洞掃描的主要功能是什么
電子地圖的主要功能與應(yīng)用

微處理器的主要功能是什么
RFID天線的工作原理和主要功能
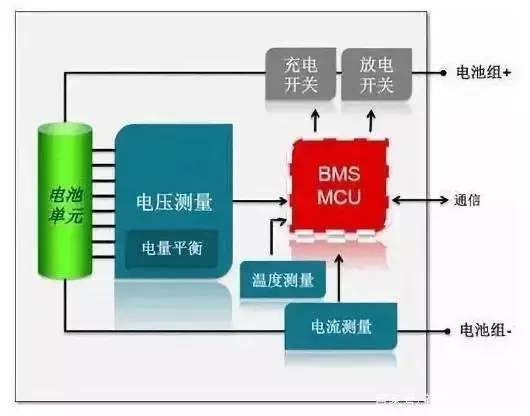
BMS電池管理系統(tǒng)的主要功能
連接器的主要功能是什么
傳感器的主要功能是什么

電力監(jiān)控系統(tǒng)的主要功能是什么 電力監(jiān)控系統(tǒng)與能耗監(jiān)測系統(tǒng)區(qū)別
bms主要功能有哪些
集成放大電路中輸出級的主要功能
AMI網(wǎng)絡(luò)的主要功能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論