 Moku:Pro/Lab/Go的激光穩頻一體化解決方案
Moku:Pro/Lab/Go的激光穩頻一體化解決方案
Pound-Drever-Hall(PDH)技術是一種主動鎖頻技術,是目前激光穩頻系統中性能最好的手段之一,由 R.V. Pound,Ronald Drever 和 John L在1983年首次提出的。利用Fabry-Perot(F-P)腔穩頻的激光系統是最常見的一種穩頻方法。當激光被射入一個F-P腔中時,它會被反射、透射或吸收,腔的長度越接近激光器的精確波長的一半,激光器的能量就會被傳輸的越遠。不幸的是,激光的頻率和腔長的連續變化取決于一系列的因素,如環境溫度、注入電流和量子波動。PDH鎖定利用從諧振腔反射出來的光來產生一個誤差信號,來對諧振腔的長度或激光器的頻率進行微調,從而完成腔長和激光頻率的某種匹配,以達到最大限度地實現遠距離傳輸。
根據框圖簡單說一下PDH技術,激光器輸出頻率為ω的激光,然后經過EOM晶體(electric-optical modulator)電光調制器,對激光光場進行射頻電光相位調制,然后將調制后的激光信號經過偏振分束棱鏡(PBS)與四分之一波片(λ/4)進入光學腔,然后通過反射到達光電探測器,偏振分束棱鏡(PBS)與四分之一波片(λ/4)的作用就是讓腔反射光進入探測器。然后對反射光信號進行相位解調,得到反射光中的頻率失諧信息,產生誤差信號,然后通過低通濾波器和PID(比例積分電路)處理后,反饋到激光器的壓電陶瓷或者聲光調制器等其他響應器件,進行頻率補償,最終實現將普通激光鎖定在超穩光學腔上。關于PDH技術的理論細節可以在一些綜述論文和學位論文中找到。為了實現PDH鎖定,需要一些專用的和定制的電子儀器,包括信號發生器,混頻器和低通濾波器。Moku的激光鎖盒集成了全部的PDH電子儀器,在提供高精度的激光穩頻功能上實現了便捷易用。
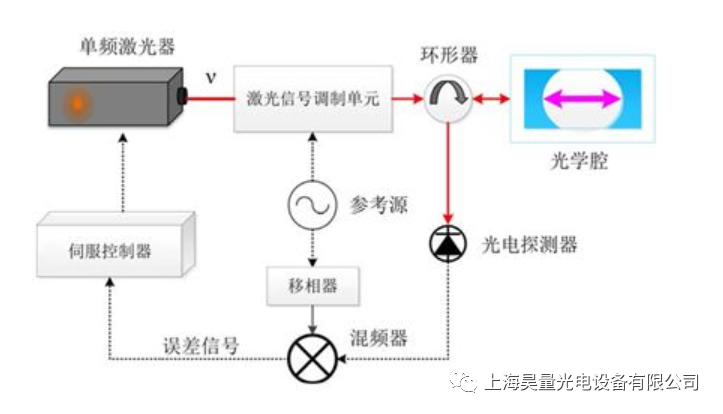
圖1:PDH穩頻系統原理圖
實驗裝置
Moku的激光鎖盒集成了波形發生器、混頻器、低通濾波器和用于PDH鎖定的雙級聯PID控制器。通過調節激光腔的長度,可以監測反射光的振幅,并在屏幕上實時顯示PDH信號。用戶只需輕輕一敲就可以將激光鎖定在任何過零點。
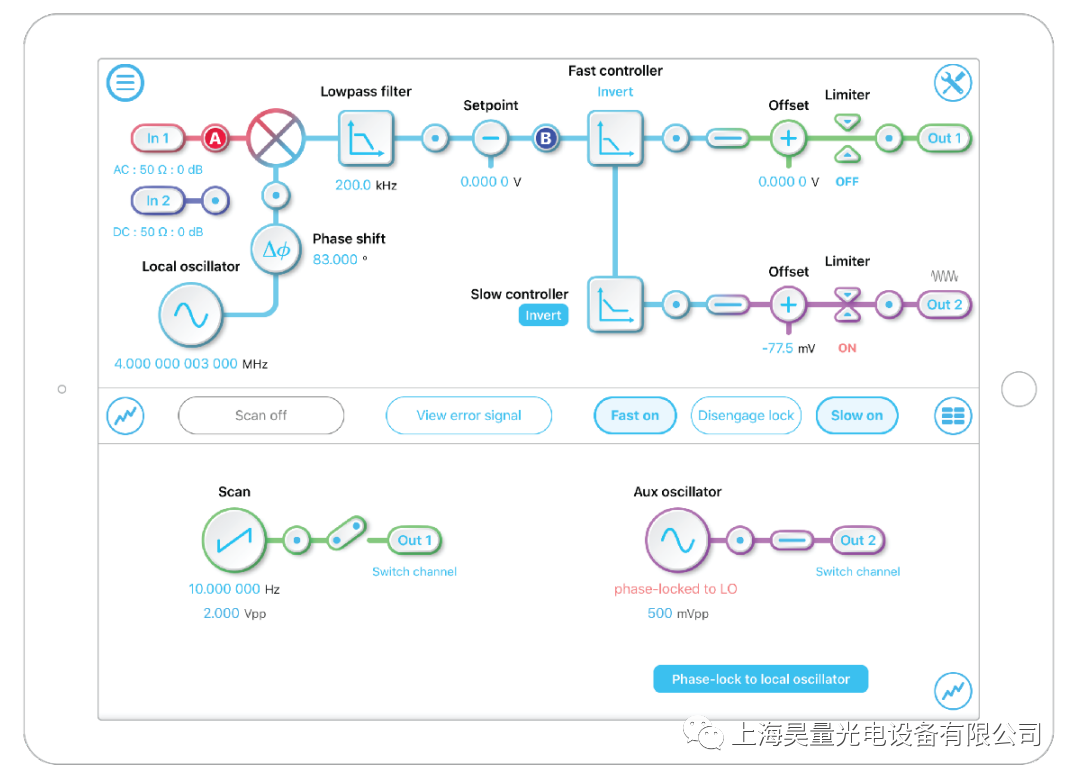
圖2:主用戶界面Moku:Lab激光鎖盒
在一個示例設置中,Prometheus激光器(Innolight, 20NE)的出射光由電光調制器(EOM, iXBlue, NIR-MPX-LN-0.1)調制,照射到由三鏡環形腔(168 mm,即1.78 GHz的FSR),此腔體線寬為190 kHz。反射光被輸入耦合器即時反射捕獲。用兩個光電二極管(PD, Thorlabs, PDA05CF2)來檢測腔體的透射光和反射光。PD上檢測到的信號被輸入到Moku:Lab的輸入1(混頻器輸入,交流耦合電阻50 Ω)和輸入2(監視器,直流耦合電阻50 Ω)。利用Moku的激光鎖盒波形發生器,在3.0 MHz的頻率下產生了500 mVpp的本振(LO)信號。然后LO信號從Moku:Lab的輸出2輸出,通過偏置器(miniccircuits, ZFBT-6G+)驅動EOM。用LO數字信號波形解調來自光學腔的反射響應信號,這里我們用到了數字混頻器和角頻300.0 kHz的四階數字低通濾波器。通過掃描空腔共振的激光頻率,調整相位延遲,直到誤差信號峰-峰電壓(斜率)最大,從而調整混頻器處LO信號的相移。
快速PID控制器的積分器單位增益頻率(0 dB點)為5.8 kHz,初始積分器飽和角為100Hz。然后將快速PID的輸出1直接連接到激光器的壓電陶瓷上來驅動激光頻率。在掃描模式下,該輸出也會產生斜坡信號來發現空腔諧振。低頻PID控制器的比例增益為-32.2 dB,積分器交叉頻率為200 mHz。Moku:Lab的輸出2出來后通過Bias-Tee分成了兩路,一路到了EOM,一路到了激光的溫度控制BNC接口端。在該激光溫度致動器上放置了一個20dB的衰減(Minicircuits, HAT-20+),以降低其靈敏度。
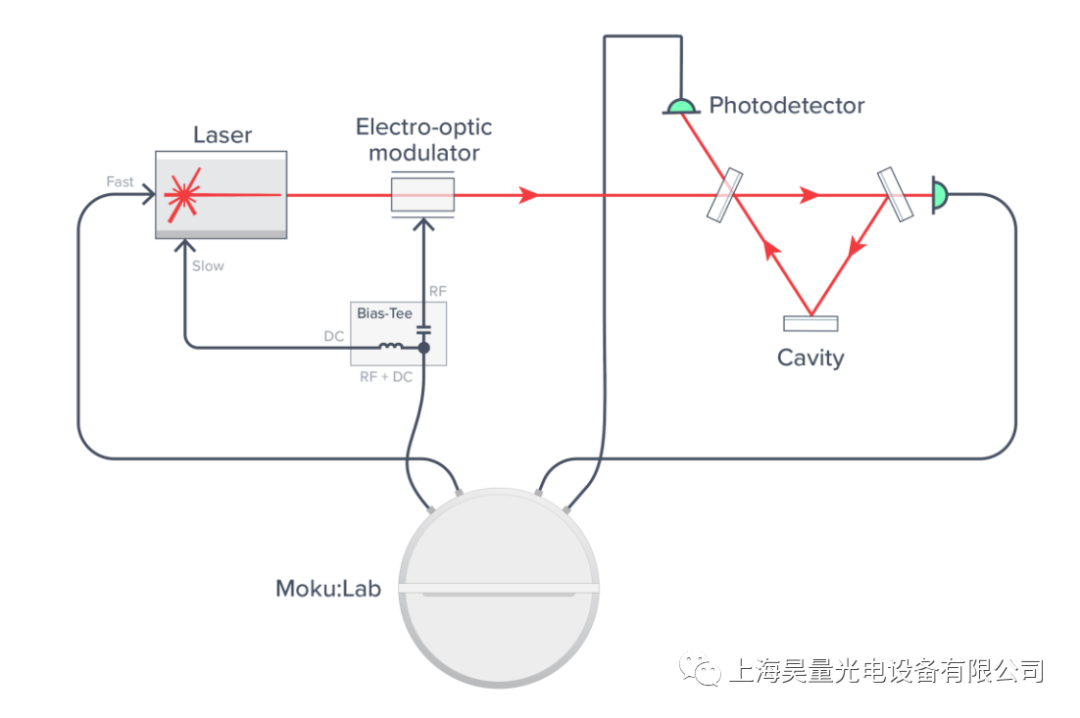
圖3:利用Moku:Lab建立的PDH技術的實驗裝置
| 解調頻率范圍 | 1mHz-600MHz |
| 輸入通道數量 | 4 |
| 輸出通道數量 | 4 |
| 采樣頻率 | 單通道≥5 GSa/s |
| 分辨率 | 10 bits |
| 輸入最大電壓 | 40Vpp(1MΩ) |
| 相移精度 | 0.001° |
| 動態儲備 | >120dB |
| 最短時間常數 | ≤ 30 ns |
| 集成PID模塊且數量 | ≥4個 |
| 輸入輸出延遲 | <1us |
| 集成示波器,可對輸入信號進行采集,存儲深度12GB | |
| 集成示波器,任意波形發生器,頻譜分析儀,鎖相放大器,相位計,激光鎖頻模塊等 | |
| 支持MATLAB,Python, LabVIEW,C和 .NET應用開發接口 | |
| 支持二次開發云編譯 | |

結果和討論
通過監控傳輸的光電探測器功率,并通過CCD相機(也可以使用紅外敏感觀察卡)查看傳輸過程中的激光模式形狀,來驗證激光對腔和TEM00模式的鎖定。這些監測信號的時域信息很容易在Moku:Lab的激光鎖盒功能內置的示波器中實時查看。
利用內置的示波器測量特性來捕捉誤差信號均方根RMS,對整個環路的增益進行了基本優化。增加增益使誤差信號的均方根最小;太多的增益會引起振蕩,太少的增益意味著激光頻率擾動仍然沒有得到充分的抑制。進一步的環路性能改進可以通過頻域優化來實現,這可以通過在Moku:Lab輸出1和激光壓電之間注入掃頻正弦擾動來實現,激光壓電使用了求和前置放大器,并可以測量回路中注入擾動的抑制。這樣的測量可以進行使用第二個Moku:Lab的功能:頻率響應分析儀。在這些高度優化的配置中,環路的單位增益頻率應該優化到30-60 kHz(高于這通常相對于激光的壓電響應速度快很多)。
在一次測試中,使用單腔雙激光測試驗證了控制回路的性能。第二個激光器被鎖定在腔內一個自由光譜范圍(FSR)上,第一個激光器的鎖與第二個具有相同的Moku:Lab激光鎖頻設置。在兩個獨立頻率的鎖定下,比較了兩種激光器在相同的普通腔的噪聲:獨立的電子噪聲和Moku數字化噪聲。這兩種鎖定激光器之間的剩余頻率變化與腔間隔噪聲、腔涂層的熱噪聲和來自實驗室環境的常見振動無關,這種噪聲僅由控制回路和傳感器產生,測量方法是將來自兩個激光路徑的光結合到一個高速光電探測器中,與一個穩定的GHz函數發生器混頻,并使用第三個Moku:Lab儀器,一個相位表,來跟蹤頻率偏差。Moku:Lab相位表通過產生相對頻率噪聲的ASD來讀出剩余頻率噪聲。我們得到了在每個環路10 Hz的情況下,控制回路的殘余噪聲是0.1 Hz/ Hz。腔激光鎖模的真實絕對性能最終受到基頻熱涂層噪聲的限制。
在以上的實驗論述中,我們發現我們需要三臺Moku:Lab來功能完成這個實驗。如果我們使用Moku:Pro的多儀器并行功能,即可同時在一臺儀器上運行多個功能,更加節省了實驗室空間以及實驗的便捷性。
-
激光
+關注
關注
19文章
3123瀏覽量
64363 -
穩頻
+關注
關注
0文章
8瀏覽量
6290
發布評論請先 登錄
相關推薦
千方新能源停充一體化解決方案
光儲充一體化電站建設解決方案

水肥一體化解決方案,顛覆傳統農業的未來

淺析光儲智能一體化充電站的解決方案與應用
供應 ETA9184:TWS的一體化解決方案
“光伏+儲能”一體化解決方案
《嵌入式機電一體化系統設計與實現》讀后感
安科瑞風光儲充一體化解決方案
安消一體化平臺建設方案
天合光能一體化解決方案 Rangitaiki光伏園圓滿竣工
中科創達車路云一體化解決方案亮相2024WAIC
安富利推出基于Sysinno的iAeris室內空氣質量一體化解決方案
高精度時頻一體化設備-陜西風雷儀表
什么是通感算一體化?通感算一體化的應用場景






 工商網監
工商網監
評論