 科普系列:低速容錯CAN的容錯機制介紹
科普系列:低速容錯CAN的容錯機制介紹

作者 |TYT
小編 | 吃不飽
汽車的CAN總線大致可以分為三大類,分別是:單線CAN(GM專用的低速CAN)、高速CAN(通信速率高)以及低速容錯CAN(通信速率較低但容錯性能好)。本文所要講述的是低速容錯CAN。在傳統的分布式架構中,車身舒適CAN節點對總線通信速率沒有過高要求,但為了適應車型高中低配的變化,其節點數量和組合及在車中的布置更為多樣,這就更多的引入了出現故障的因素,使得低速CAN在車身舒適網段得到了廣泛的應用。為了更好的了解低速容錯CAN,首先要從它的協議講起。低速容錯CAN最早被定義在ISO11519協議中,后續因為符合11898-3協議標準的樣件也完全符合ISO11519-2協議的要求,同時因為11898協議應用的范圍更全更廣,所以在2006年ISO11519-2協議徹底的被11898-3協議所替代。ISO11898-3定義了低速容錯CAN的物理層、低速容錯CAN的工作機制以及容錯機制的實現。01低速容錯CAN的物理層與高速CAN一樣,低速容錯CAN也使用了差分雙絞線進行傳輸,有CAN_H、CAN_L兩線,并且在嚴格的工業應用場合與高速CAN一樣要求使用專用的屏蔽雙絞線并加必要的防護電路。
在差分電壓的變化上低速容錯CAN在顯隱性跳轉的時候CANH和CANL電壓的變化是比高速CAN要大的,這意味著低速容錯CAN有著更高的抗干擾性。
11898-3定義了低速容錯CAN在隱性狀態時,CANH為0V、CANL為5V。而當低速容錯CAN要發送顯性位時,CANL會跳轉到1V、CANH會跳轉到4V,這個時候單一條總線的電壓變化為4V,而且差分電壓大概也為4V(如圖1),而高速CAN的差分電壓為2V(如圖2),同時CANH與CANL從隱性跳轉到顯性的時候電壓的變化僅有1V,這也意味著高速容錯CAN的容錯性能是不如低速容錯CAN的。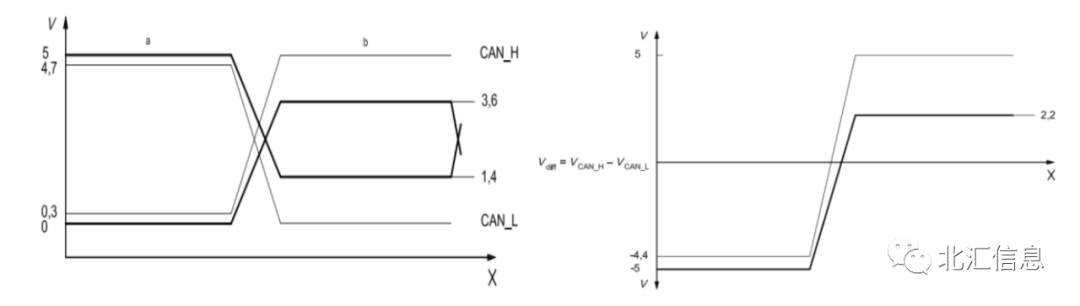 圖1:低速容錯CAN總線電壓
圖1:低速容錯CAN總線電壓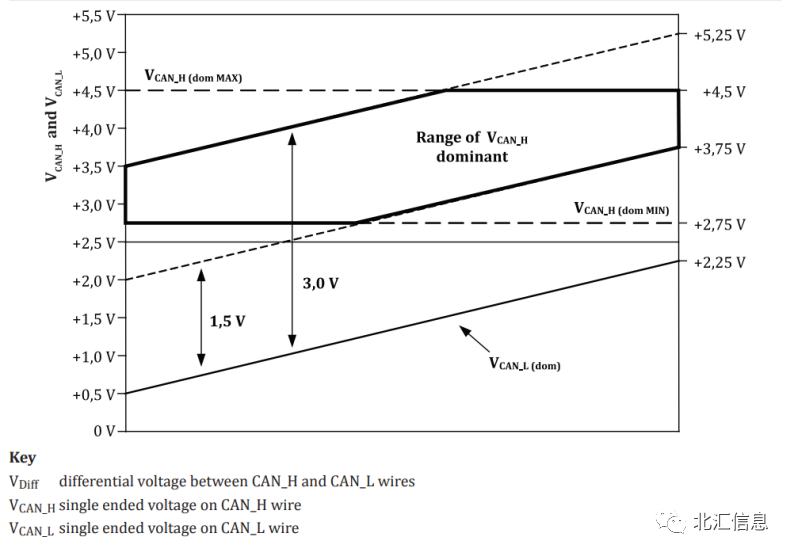 圖2:高速CAN總線電壓
圖2:高速CAN總線電壓
在低速容錯CAN的物理層中,11898-3還定義了它的終端電阻是直接端接在支線上的,電阻接線如圖3所示。這樣做的好處是在容錯機制處理部分斷路故障時,哪怕會出現單線通信的情況,也會有終端電阻的存在去匹配阻抗以及減小反射(如圖4所示),這樣便不會因為斷開CANH或CANL的單線而對樣件的通信傳輸造成影響。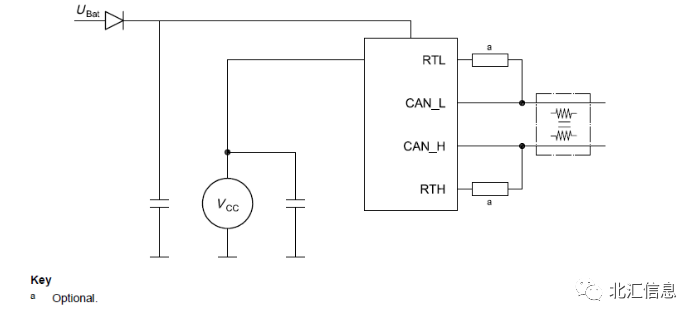 圖3:終端電阻接線圖
圖3:終端電阻接線圖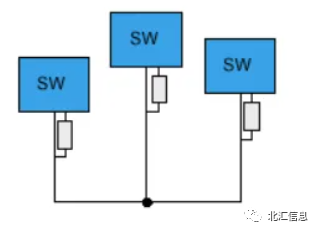 圖4:容錯CAN單線工作時總線拓撲圖
圖4:容錯CAN單線工作時總線拓撲圖
02協議中容錯機制的定義
11898-3分別定義了電源故障和總線故障兩種類型,而容錯機制主要是對總線故障進行處理。為了應對不同的總線故障,11898-3定義了低速容錯CAN需要有三種不同的收發器工作方式:差分驅動和接收、CANH單線通信、CANL單線通信,三種工作方式對應的故障檢測機制分別為狀態0:正常工作狀態、狀態E1:CAN_L故障檢測、狀態E2:CAN_H故障檢測。11898-3定義的幾種故障檢測機制的故障處理流程圖如下。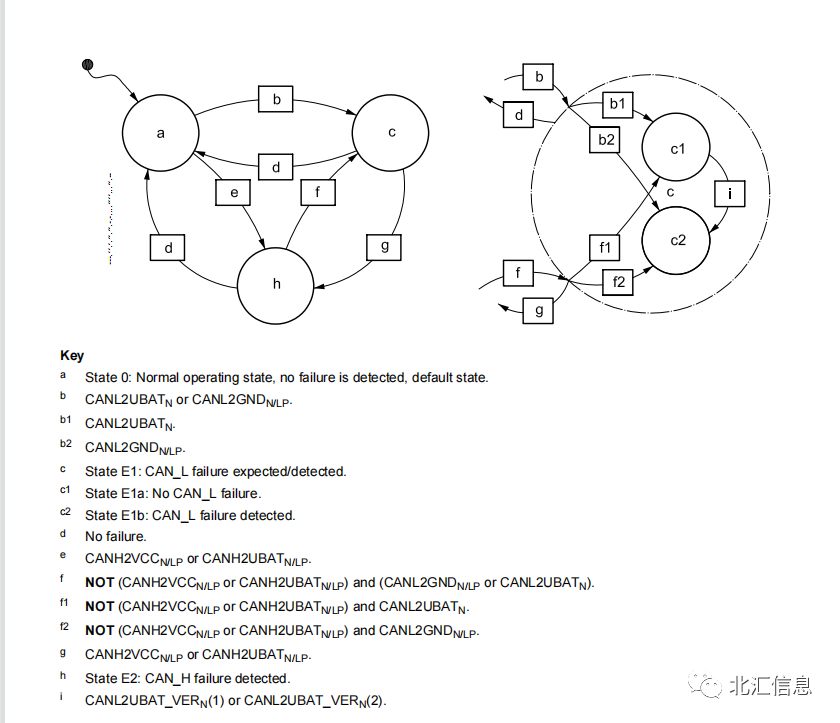 圖5:故障處理流程圖
圖5:故障處理流程圖
03TJA1054實現的容錯機制
通過之前的介紹,我們對低速容錯CAN的物理層有了較為全面的了解,現在我們便從物理環境的實現上來講解低速容錯CAN的容錯機制。在這我需要為大家介紹一款適用于低速容錯CAN的收發器芯片-TJA1054。首先是這款芯片的物理環境,其結構圖和引腳定義如下圖所示,TJA1054在CANH及CANL兩端的電阻設計滿足了ISO11898-3需求,同時TJA1054設計有門檻電壓,能較好的實現低速容錯CAN所需求的容錯機制。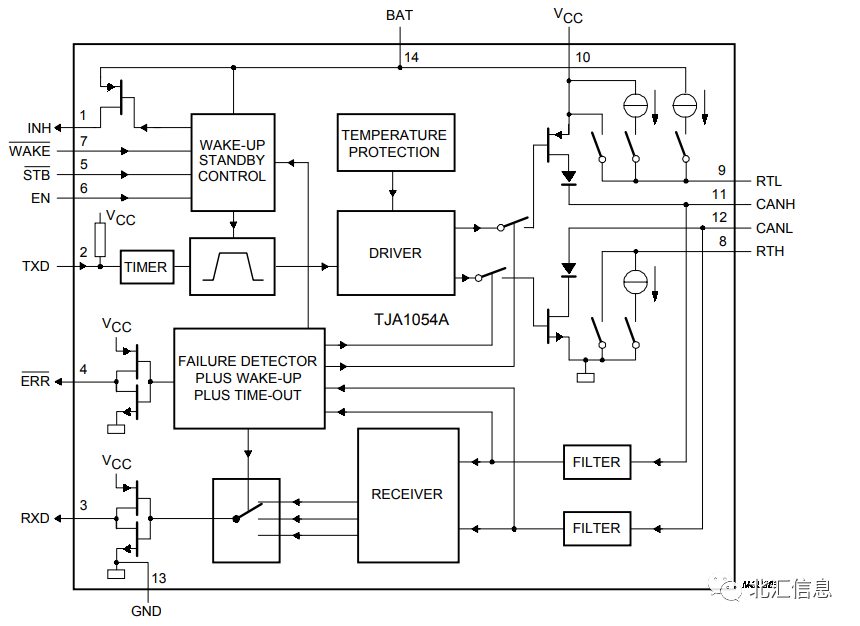 圖6:TJA1054芯片結構圖
圖6:TJA1054芯片結構圖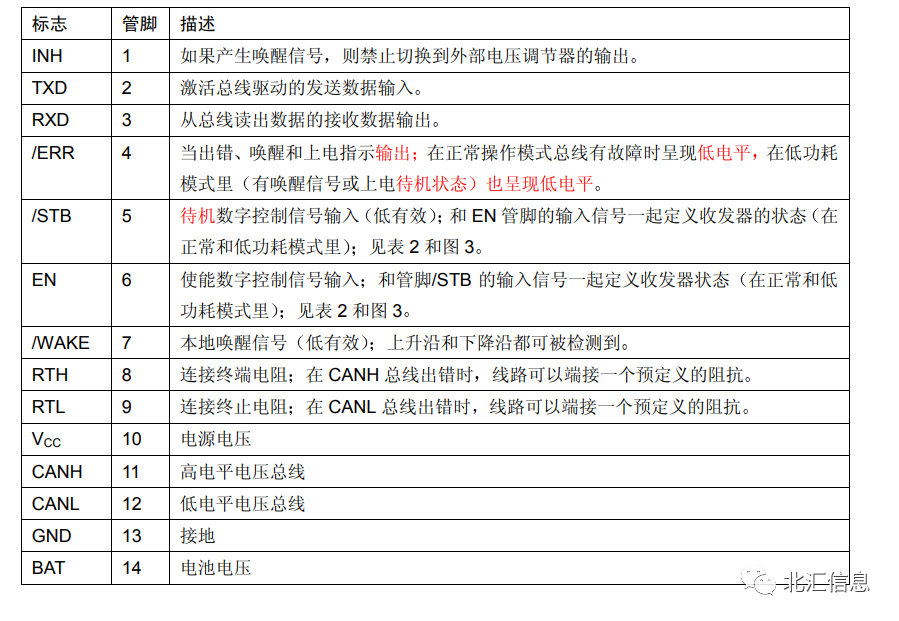 圖7:TJA1054芯片引腳定義圖
圖7:TJA1054芯片引腳定義圖
04TJA1054的功能描述
TJA1054是控制器局域網 CAN 中協議控制器和 CAN 物理總線之間的接口,它主要用于客車里最高 125KBps的低速應用,這個器件對 CAN 總線提供差動發送能力,對CAN 控制器提供差動接收能力。在正常操作模式時(沒有線路故障),差動接收器在管腳 RXD 輸出(見圖 1)。差動接收器輸入通過集成的濾波器連接到管腳CANH和CANL 波器輸入信號也可以用于單線接收器。接收器連接到有門檻電壓(差動接收器的門檻電壓為-3.2V)的管腳CANH和CANL確保在單線模式里有最大的噪音容限。
同時定時器功能(TxD 顯性超時功能)已在器件中集成,它可以防止由于硬件或軟件程序故障,將管腳 TXD 持續地拉成低電平,使總線線路進入持續的顯性狀態(這種狀態會阻塞整個網絡的通訊)。
如果引腳 TXD 的低電平持續并超過某個時間后,發送器會被禁用,定時器會用 TXD 引腳上的高電平復位。而低速容錯CAN的容錯機制則是通過故障檢測器監測總線電平,在監測到其中一條總線故障后,監測器便會切換到相應的模式,模式圖如下表所示。這便滿足了ISO11898-3中定義的正常工作模式下的三種故障檢測機制。下圖便是TJA1054在不同錯誤狀態下的接收器模式列表。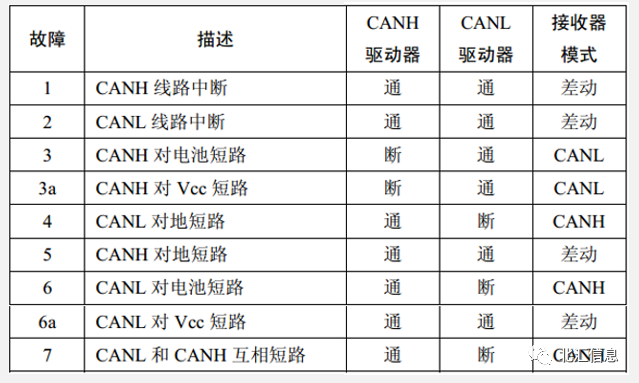 圖8:TJA1054在不同錯誤狀態下的接收器模式對于上表中出現的三種接收器模式,我將使用表格的形式為大家進行介紹。首先是差動模式,因為TJA1054設定了差動接收器門檻電壓為-3.2V,這確保了當出現下表中故障1、2、5、6a時,雖然CANH和CANL的電壓會因為以上四種故障有改變,但最終差分電壓Vdiff都能在隱性時小于-3.2V顯性時大于-3.2V,所以不需要進行調整便能繼續通信。
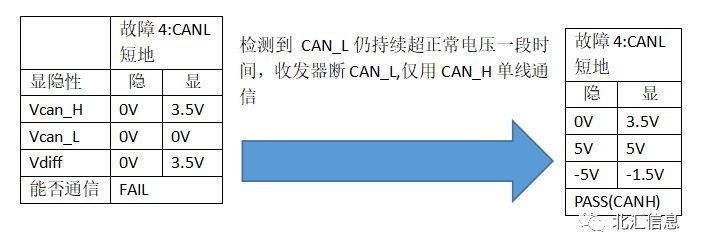
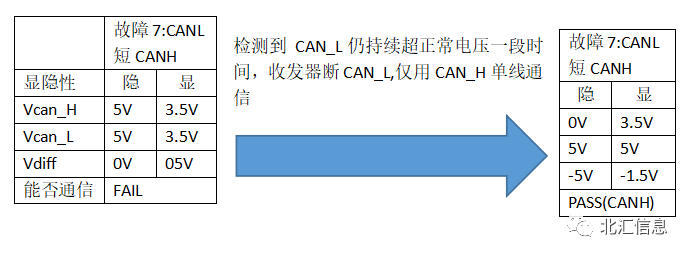
圖8:TJA1054在不同錯誤狀態下的接收器模式對于上表中出現的三種接收器模式,我將使用表格的形式為大家進行介紹。首先是差動模式,因為TJA1054設定了差動接收器門檻電壓為-3.2V,這確保了當出現下表中故障1、2、5、6a時,雖然CANH和CANL的電壓會因為以上四種故障有改變,但最終差分電壓Vdiff都能在隱性時小于-3.2V顯性時大于-3.2V,所以不需要進行調整便能繼續通信。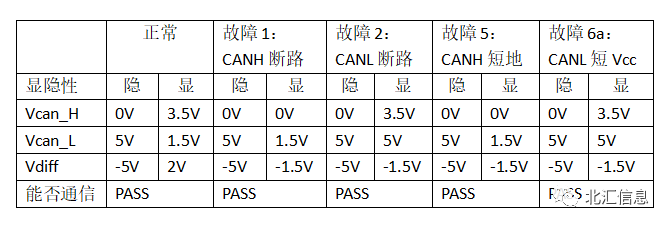 當出現了下表中故障4、6、7三種故障時,差分模式已無法滿足總線的正常通信。TJA1054會斷開CANL,則CANL會保持Vcc的電壓不變,一直為5V。此時差分電壓Vdiff能滿足在隱性時小于-3.2V顯性時大于-3.2V,實現對故障4、6、7三種故障的容錯。
當出現了下表中故障4、6、7三種故障時,差分模式已無法滿足總線的正常通信。TJA1054會斷開CANL,則CANL會保持Vcc的電壓不變,一直為5V。此時差分電壓Vdiff能滿足在隱性時小于-3.2V顯性時大于-3.2V,實現對故障4、6、7三種故障的容錯。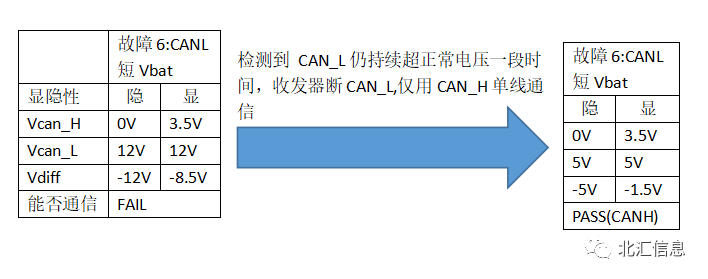
 當出現CANH單線通信模式也無法解決的故障時,如下表故障3和3a,TJA1054會先斷開CANL嘗試用CANH單線通信來保持通信,但故障3和3a在此時的差分電壓會一直大于-3.2V,使總線長時間處于顯性狀態。所以這時TJA1054會嘗試保持CANL通信不變,斷開CANH。此時CANH上電平始終為0V,差分電壓Vdiff在總線為隱性時為-5V(小于-3.2V),顯性時為-1.5V(大于-3.2),符合規范規定及使用需求,所以低速容錯CAN在發生故障3和故障3a時正常通信。
當出現CANH單線通信模式也無法解決的故障時,如下表故障3和3a,TJA1054會先斷開CANL嘗試用CANH單線通信來保持通信,但故障3和3a在此時的差分電壓會一直大于-3.2V,使總線長時間處于顯性狀態。所以這時TJA1054會嘗試保持CANL通信不變,斷開CANH。此時CANH上電平始終為0V,差分電壓Vdiff在總線為隱性時為-5V(小于-3.2V),顯性時為-1.5V(大于-3.2),符合規范規定及使用需求,所以低速容錯CAN在發生故障3和故障3a時正常通信。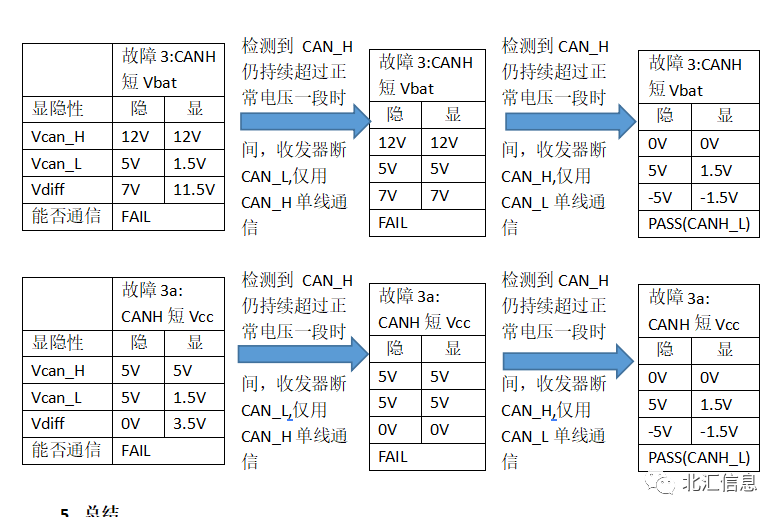 05總結
05總結
當前,低速容錯CAN由于其通信速率的限制,其在車載領域的應用更少了,本文所介紹的低速容錯CAN的物理層、容錯機制以及容錯機制在芯片中的實現原理,希望可以加深大家對CAN通信原理的理解。
北匯信息專注于汽車電子網絡通信、診斷刷寫、邏輯功能測試開發服務,期待進一步溝通交流、共享合作的機會。
-
CAN
+關注
關注
57文章
2720瀏覽量
463393 -
汽車
+關注
關注
13文章
3433瀏覽量
37178
發布評論請先 登錄
相關推薦
服務器數據恢復—DELL EqualLogic PS6100系列存儲簡介及發生故障如何處理?
CH32FV系列CAN設備過濾器配置

該如何提高代碼容錯率、降低代碼耦合度?

電子峰會亮點不容錯過:技術、市場、趨勢全方位洞悉!

工業交換機的網絡容錯機制:確保工業網絡穩定運行
在H750DK上做了一個TouchGFX的工程,按鍵按下后,再次刷新出來的顯示內容錯位的原因?
CAN 會收到錯誤的數據嗎?






 工商網監
工商網監
評論