 耀學堂 | 技術咖教你看懂毫米波雷達
耀學堂 | 技術咖教你看懂毫米波雷達
提到毫米波雷達,就要先提“物聯網”,眾所周知,物聯網的定義就是通過各種傳感器,按約定的協議,把物品與互聯網連接起來,進行信息交換和通訊,以實現智能化識別、定位、跟蹤、監控和管理的一種網絡。
毫米波雷達是物聯網中不可或缺的傳感器之一,是一種廣泛用于測距和探測物體的無線電傳感器。毫米波傳感器一般包括三個主要部分:
發射機TX:放大并發射毫米波信號
接收機RX:接收目標反射回來的毫米波信號
信號處理DSP:處理信號以獲得物體的信息
利用物體的距離、速度和角度信息可以開發更高層的應用。
毫米波雷達的優勢
對于智能時代而言,傳感器已經不僅僅是采集數據的眼睛和耳朵,更是高端制造、流程控制、聯網操作的大腦和心臟。毫米波傳感器利用雷達的原理,賦予智能設備感知的能力。由于毫米波雷達不容易受環境(溫度、光線等)的影響,能夠穿透塑料、墻板和衣服等非金屬材料,決定了它可以在更廣闊的民用領域(交通、安防、家居、衛浴、健康、照明、農業等)中占據C位。
1
測距原理
毫米波雷達使用線性調頻信號作為發射信號,使用匹配濾波器來提高接收回波的信噪比。
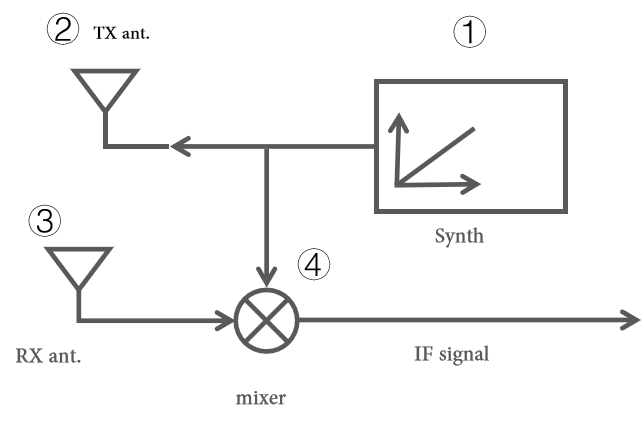
線性調頻測距四步
① 合成器產生線性調頻信號。
② 線性調頻信號由天線發射。
③ 信號反射回來由接收天線接收。
④ 接收信號與發射信號混頻產生中頻信號。
2
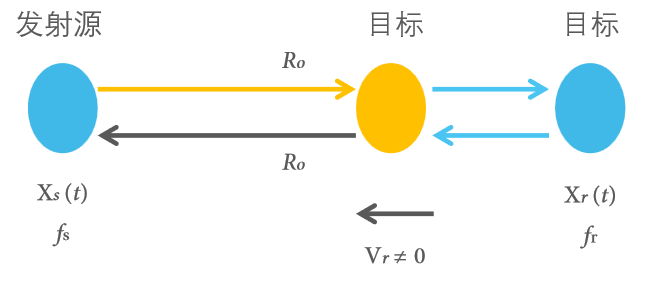
測速原理
對于運動的目標,發射信號與接收信號之間存在頻率差 Δf ,這個頻率差被稱為多普勒頻率。
3
測角原理
目標距離的微小變化會導致range-FFT峰值的相位變化。角度估計至少需要2個RX天線。從目標到每個天線的差分距離Δd導致FFT峰值發生相位變化,該相位變化用于估計到達角。
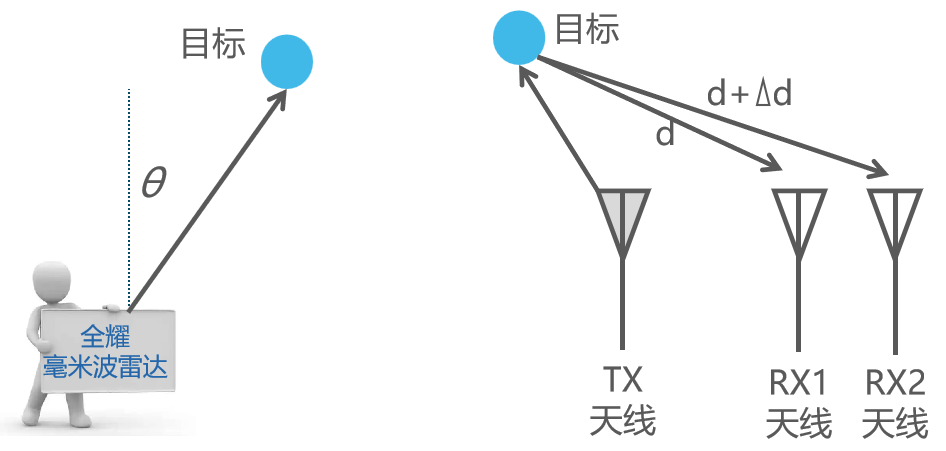
角度θ 也稱為到達角(AoA),假設天線間距離為d則?d=dsin(θ),因此可估算出到達角為θ=sin(λω/2πd),當θ 接近0 °時,角度的估算精度較高,隨著θ 角度的增大估算精度降低,當θ 接近90°時,誤差最大。
毫米波雷達芯片結構
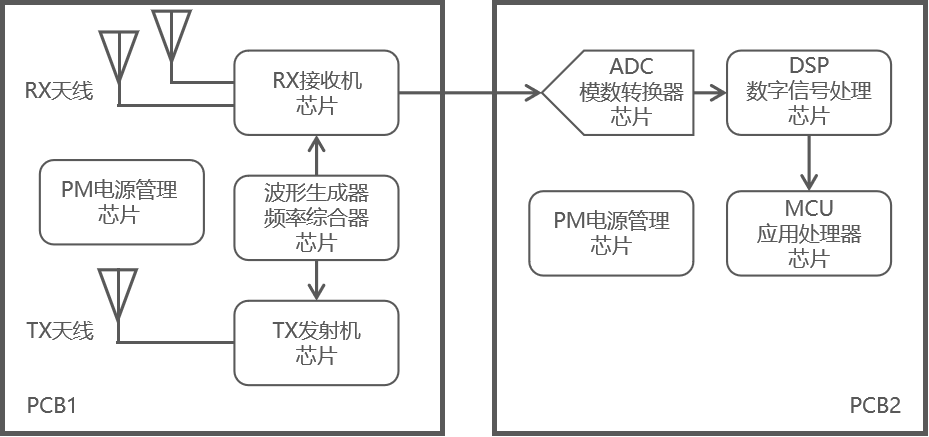
1
多芯片毫米波雷達傳感器
復雜的元器件連接和布線
抗干擾能力差
系統設計和控制難
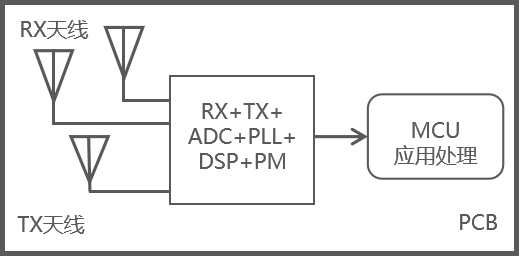
2
單芯片毫米波雷達傳感器
方案尺寸小
方案設計簡單
器件少
低功耗
毫米波雷達主要參數
1
發射頻率
常用的毫米波雷達頻段為24GHz、60GHz和77GHz這三個頻段。
2
探測距離
即毫米波雷達能夠探測到的范圍,測距能力與很多因數有關。探測距離主要與發射功率、天線增益、天線波束角和物體反射截面積。通常發射功率越大,天線增益越高、天線波束角越窄以及物體反射截面積越大,雷達能夠檢測到的有效回波就越強,測量距離就越遠。
3
探測精度
即單目標的速度測量精度,數據取決于信噪比(衡量雷達接收信號質量的單位)。信噪比高不高,是衡量毫米波雷達的目標檢測性能是否強大的根本參數。
4
測速范圍
毫米波雷達的測速是利用多普勒效應原理,當目標向雷達天線靠近時,反射信號頻率將高于發射機頻率;反之,當目標遠離天線而去時,反射信號頻率將低于發射機頻率。
5
測速精度
即單目標的速度測量精度,數據取決于信噪比(衡量雷達接收信號質量的單位)。信噪比高不高,是衡量毫米波雷達的目標檢測性能是否強大的根本參數。
6
天線波束角度范圍
天線波束形狀一般用水平和垂直面內的波束寬度來表示(3dB表示)。常見的波束形狀有扇形、針狀和余割平方形。天線的波束角度范圍越窄,輻射的能量更集中,雷達測測的距離會越遠。
只要了解以上的基礎知識,咱們對毫米波雷達就有了全新的認識。隨著萬物互聯時代的日漸成熟,毫米波雷達已經真正走進我們的尋常生活,為人們帶來美好便捷、安全健康的智慧生活新體驗。
-
雷達
+關注
關注
50文章
2904瀏覽量
117352 -
毫米波
+關注
關注
21文章
1916瀏覽量
64707
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論