 RJSII40關節模組——超大力矩,輸出更強勁
RJSII40關節模組——超大力矩,輸出更強勁
泰科智能機器人于2016年轉型生產,作為一家以機器人關節研發為起點的機器人企業,一直致力于機器人關節研發,推出的多系列關節模組,并獲得國內高校及機器人公司高度認可。
為應對協作機器人多變的工作環境,增強協作機器人適應性能,泰科在2019年底推出RJSII系列關節模組,采用全新的關節設計,具有更好的散熱性能和力矩輸出能力及穩定性,同時也提升了關節的防護等級,使之可以更好的應用于各種苛刻的工作環境,目前主要應用于小負載的協作機器人。
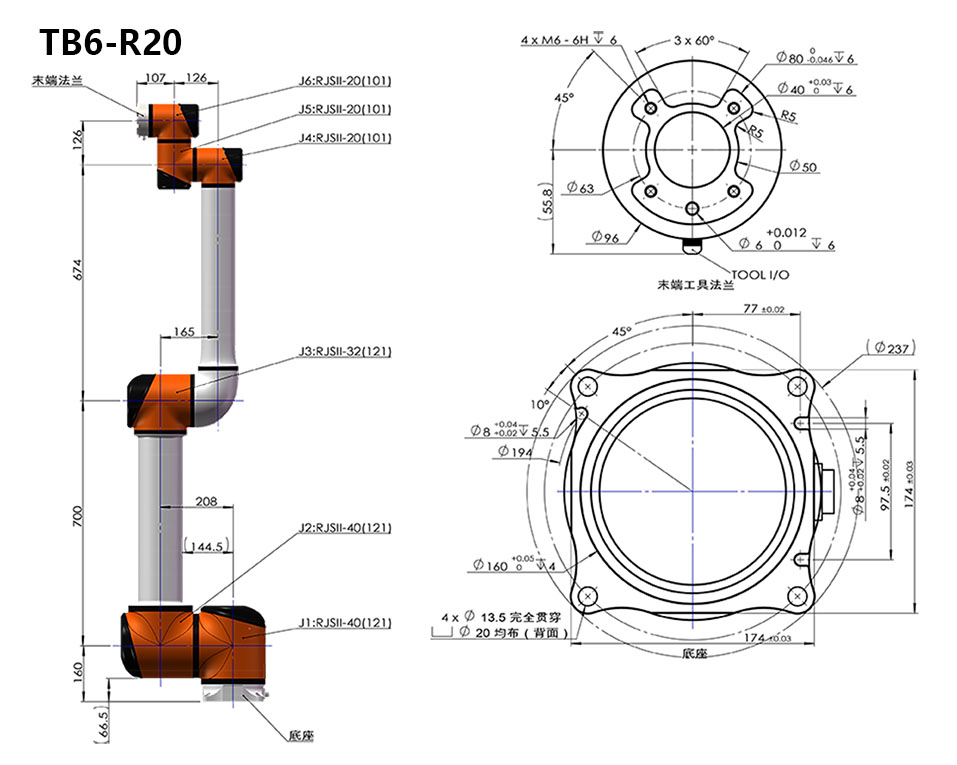
為滿足大負載協作機器人需求,泰科最新推出RJSII系列新型RJSII40關節模組,采用額定功率為1050的無刷伺服力矩電機和品牌減速器,在確保RJSII40關節模組的輸出性能及強大的負載轉矩能力,更具穩定性。
RJSII40模組本體重量高達17kg,專業應用于負載20kg工業協作機械臂上,在確保1500mm的工作半徑同時,很好的降低了機械手臂的重心,增強了穩定性和提高臂的負載能力。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
模組
+關注
關注
6文章
1438瀏覽量
30299
發布評論請先 登錄
相關推薦
基于FOC控制的雙電機力矩反饋控制系統
近期做了幾個無刷電機項目,在開發過程中對無刷控制有了一些新的認識,看到“稚暉君”的像素級控制,我也萌生了自己做個一個雙電機力矩反饋的系統的念頭。說干就干,構思,設計電路,畫板,打樣,調試,項目干完
發表于 11-26 17:34
【AI技術支持】ESP32-WROOM-32E-N4模組管腳輸出異常處理
信號輸出到顯示芯片上,這是為什么呢?啟明云端/02這是咋回事呢?(1)使用直流電源給主板上電,上電后模組不能啟動,沒有打印信息輸出,短接模組EN腳不能復位,直流電

力矩電動機是什么?它有什么應用原理?
力矩電動機是一種特殊類型的電動機,它主要用于產生較大的力矩,而不需要產生高速旋轉。這種電動機在許多工業和自動化應用中非常有用,例如在機器人、輸送帶、起重機和其他需要精確控制力矩的場合。力矩
什么是力矩電動機?它具有什么特點?
力矩電動機是一種特殊類型的電動機,主要用于需要精確控制轉矩和轉速的場合。它的特點在于能夠提供較大的起動轉矩和寬廣的速度范圍,同時具有較高的效率和良好的動態響應。以下是關于力矩電動機的介紹: 力矩
機器人關節模組為何選擇雙編碼器設計?
關節模組是機器人關節控制系統中的核心組件,決定了機器人的運動控制與動作精準度。在關節模組中,位置反饋和誤差校正是確保精確運動的關鍵,而雙編碼

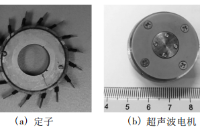
高壓功率放大器在徑向駐波型超聲波電機研究中的應用
實驗名稱:大力矩徑向駐波型超聲波電機有限元分析與實驗研究研究方向:超聲電機測試目的:提出了一種大力矩徑向駐波型超聲波電機,在實現電機大力矩輸出的同時保持結構緊湊的特點。首先設計并分析了
交流太陽能模組&微逆變器(一)LAB COMPANION
系統配置失調,導致輸出效率下降的瑕疵,這 些都是傳統集中式逆變器難以克服的問題。 太陽能發電成本比例:模組(40~50%)、施工(20~30%)、逆變器( ? ? ? ? ?為了克服這樣的問題,于2008年發展出微型逆變器(mi

泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展
作為開年第一大展,ITES深圳工業展于3月28-31日,在深圳寶安國際會展中心成功舉辦,泰科機器人攜人形機器人關節模組新品、智能分揀搬運、雙臂協作試劑開擰瓶蓋、移液、臂展1米8的大負載協作機械臂碼垛

智同科技準雙曲面傳動關節模組HYP-6B、HYP-6C兩款產品面世
歷經1372天產品開發時間,智同科技最新系列研發成果——準雙曲面傳動關節模組HYP-6B (12Kg)、HYP-6C(25kg)兩款產品,終于正式面世。
常見的多關節機器人有哪些?具有什么特點?
關節機器人是當今工業領域中最常見的工業機器人的形態之一,適合用于諸多工業領域的機械自動化作業。多關節機器人是指由多個可動關節構成的機器人系統,每個關節都能獨立或協同作動。 CRT六軸雙

力矩電機中的主軸夾緊件的作用是什么?
原停產力矩產電機型號1FW3152-1ML62-7AE0-Z N99+X53+T20+K40
編碼器讀數頭型號AK ERM 280 2048 01-03
此電機附件T20表示NDE端軸承端蓋(同軸
發表于 01-09 06:50
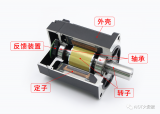
無框電機最適合哪種應用?為什么機器人關節要用無框力矩電機?
機器人關節要求電機體積小、扭矩大、響應快。而無框力矩電機僅由轉子和定子組成,體積小,同時具有較高的功率,低轉速情況下能夠輸出更大扭矩,更符合人形機器人的需求。
發表于 01-02 13:41
?3981次閱讀
力矩電機的工作原理是什么
力矩電機是一種電動機,其工作原理是通過電源供電,產生磁場,然后利用磁場與電流之間的相互作用產生力矩,驅動轉子進行運動。 力矩電機是一種常用的電動機,廣泛應用于各個領域,如工業、交通、家電等。力
讓機器人實現開發自由,探索精密工藝的機器人關節模組
機器人關節是作為機器人各個部件之間相互連接的節點,提供了必要的運動自由度。關節模組用其精確度和可靠性,確保了機器人在各個領域的高效率和高質量表現。一體化關節使得機器人能夠模擬人類肢體的





 工商網監
工商網監
評論