") RJSIIZ機器人關節(jié)模組
RJSIIZ機器人關節(jié)模組
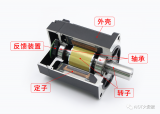
作為行業(yè)領先的協(xié)作機器人關節(jié)模組供應商, RJSIIZ系列機器人關節(jié)模組是泰科智能專為3-20Kg以下協(xié)作機器人而設計,高度集成了包括無框力矩電機、低壓直流驅動器、諧波減速機、制動器和雙反饋裝置。尺寸小,符合協(xié)作機器人緊湊、靈活的設計特點。
融合了泰科智能多年的機器人領域經(jīng)驗,RJSIIZ通過高度集成的一體化設計,降低客戶對機械選型、組裝多個環(huán)節(jié)的人員和時間投入,簡化供應鏈管理及質量管理綜合成本,實現(xiàn)機器人產(chǎn)品快速上市。讓協(xié)作機器人開發(fā)變得安全、快速、便捷。
特點
· 48VDC 額定電壓
·采用專業(yè)設計的新型無框架直驅力矩電機
·7種諧波減速器規(guī)格,方便選型
·雙反饋編碼器,包含電機換相用增量編碼器,減速機輸出端用單圈絕對值編碼器
·集成自主研發(fā)的緊湊型低壓直流驅動器,效果更好
·采用摩擦式抱閘,制動效果更好,無晃無抖
選件
·機器人末端執(zhí)行器的標準套件安裝選項,包括標準機械接口和電氣接口
·支持CANopen/EtherCAt通訊協(xié)議的高性能全數(shù)字伺服驅動器
優(yōu)點
·采用全新高性能無框力矩伺服電機,結合專用諧波減速器,發(fā)揮更優(yōu)效率并保障高質量穩(wěn)定運行
·最大扭矩達到諧波減速器的峰值性能
·實現(xiàn)更大的連續(xù)轉矩輸出,同時有效控制電機溫升和諧波減速器溫升,保障整體使用壽命
·不帶機械外殼設計,方便客戶設計全新自主品牌協(xié)作機器人及關節(jié)模組
·外切面設計,讓關節(jié)走線更方便
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
模組
+關注
關注
6文章
1438瀏覽量
30299
發(fā)布評論請先 登錄
相關推薦
人工智能機器人關節(jié)控制板BGA芯片底部填充用膠方案
人工智能機器人關節(jié)控制板BGA芯片底部填充用膠方案方案提供商:漢思新材料人工智能機器人的廣泛應用:隨著人工智能技術的飛速進步,機器人已不再是科幻電影中的幻想,而是日益融入我們的日常生活

機器人關節(jié)模組為何選擇雙編碼器設計?
關節(jié)模組是機器人關節(jié)控制系統(tǒng)中的核心組件,決定了機器人的運動控制與動作精準度。在關節(jié)

專為人形機器人應用打造,助力具身智能行業(yè)發(fā)展,泰科機器人關節(jié)模組持續(xù)升級!
為滿足新老客戶在定制人形機器人一體化關節(jié)時的最新需求,泰科機器人在結構設計、材料選擇和定制化開發(fā)等方面不斷推出創(chuàng)新方案,產(chǎn)品全系可覆蓋人形機器人全身

柔性機器人和剛性機器人有什么區(qū)別?
柔性機器人和剛性機器人都是工業(yè)機器人的一種,柔性機器人和剛性機器人的主要區(qū)別在于它們的結構和使用方式:結構:柔性

MT6701磁編碼IC在關節(jié)型噴涂機器人領域中的應用
? 在工業(yè)自動化與智能制造的浪潮中,高精度、高效率的機器人系統(tǒng)正逐步成為產(chǎn)業(yè)升級的核心驅動力。特別是在復雜多變的噴涂作業(yè)環(huán)境中,關節(jié)型噴涂機器人憑借其靈活的機械結構、精準的運動控制以及環(huán)境適應性強
Al大模型機器人
金航標kinghelm薩科微slkor總經(jīng)理宋仕強介紹說,薩科微Al大模型機器人有哪些的優(yōu)勢?薩科微AI大模型機器人由清華大學畢業(yè)的天才少年N博士和王博士團隊開發(fā),與同行相比具有許多優(yōu)勢:語言
發(fā)表于 07-05 08:52
工業(yè)機器人的機械部分主要包括什么
的性能和穩(wěn)定性。 1.1 支架 支架是工業(yè)機器人的基礎,通常由金屬材料制成,如鋼、鋁合金等。支架的設計需要考慮到機器人的負載能力、運動范圍和穩(wěn)定性等因素。 1.2 臂部 臂部是工業(yè)機器人的主要運動部件,通常由多個
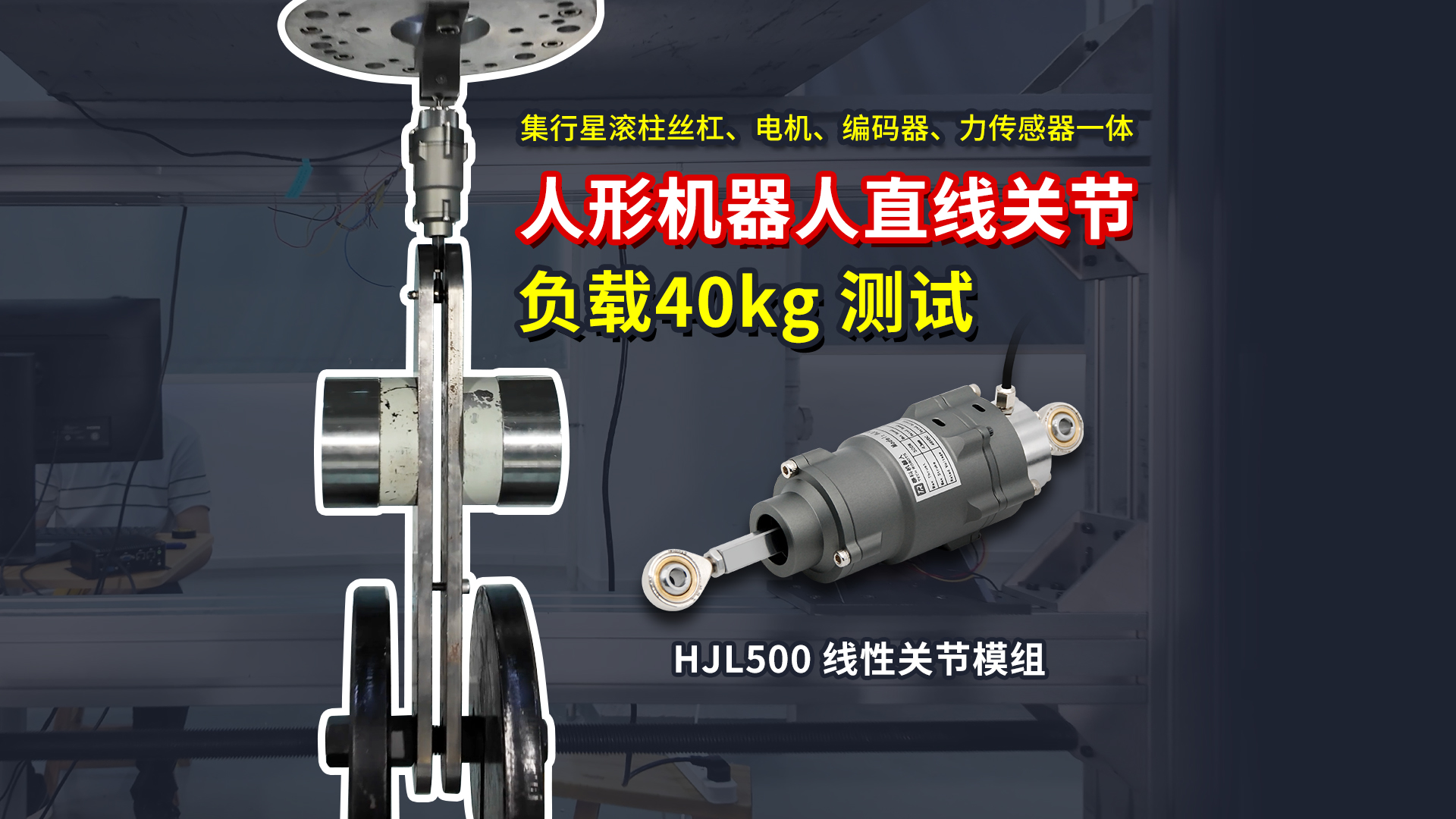
HJL500人形機器人直線關節(jié)負載40公斤測試 | 泰科機器人 #人形機器人關節(jié) #關節(jié)模組
機器人
深圳市泰科智能機器人有限公司
發(fā)布于 :2024年06月03日 17:39:32

輕量化與高性能的完美結合!MJX關節(jié)模組讓機器人動作更靈巧 | 泰科機器人 #關節(jié)模組 #協(xié)作機器人
機器人
深圳市泰科智能機器人有限公司
發(fā)布于 :2024年05月10日 16:18:55
泰科機器人攜新款行星滾柱絲杠線性關節(jié)模組和雙臂協(xié)作機器人亮相2024年ITES深圳工業(yè)展
作為開年第一大展,ITES深圳工業(yè)展于3月28-31日,在深圳寶安國際會展中心成功舉辦,泰科機器人攜人形機器人關節(jié)模組新品、智能分揀搬運、雙臂協(xié)作試劑開擰瓶蓋、移液、臂展1米8的大負載

常見的多關節(jié)機器人有哪些?具有什么特點?
關節(jié)機器人是當今工業(yè)領域中最常見的工業(yè)機器人的形態(tài)之一,適合用于諸多工業(yè)領域的機械自動化作業(yè)。多關節(jié)機器人是指由多個可動

并聯(lián)機器人和串聯(lián)機器人的區(qū)別是什么?
和串聯(lián)機器人有著明顯的差異。 并聯(lián)機器人由多個平行連接的關節(jié)和執(zhí)行器組成。每個關節(jié)都由一個電機驅動,它們可以同時工作,使得機器人的多個執(zhí)行器
無框電機最適合哪種應用?為什么機器人關節(jié)要用無框力矩電機?
機器人關節(jié)要求電機體積小、扭矩大、響應快。而無框力矩電機僅由轉子和定子組成,體積小,同時具有較高的功率,低轉速情況下能夠輸出更大扭矩,更符合人形機器人的需求。
發(fā)表于 01-02 13:41
?3980次閱讀
LabVIEW的六軸工業(yè)機器人運動控制系統(tǒng)
。
系統(tǒng)研究與算法開發(fā):首先,項目圍繞機器人的數(shù)學模型,特別是空間位姿描述和D-H模型展開研究。在此基礎上,開發(fā)了機器人的運動學正反解算法,使用了雅克比-迭代法等先進技術。此外,還涉及了機器人任務空間和
發(fā)表于 12-21 20:03
讓機器人實現(xiàn)開發(fā)自由,探索精密工藝的機器人關節(jié)模組
機器人關節(jié)是作為機器人各個部件之間相互連接的節(jié)點,提供了必要的運動自由度。關節(jié)模組用其精確度和可靠性,確保了





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論