 無人機視覺跟蹤系統解決方案-米爾基于XCZU3EG/XCZU4EV/XCZU5EV核心板
無人機視覺跟蹤系統解決方案-米爾基于XCZU3EG/XCZU4EV/XCZU5EV核心板
近些年來,隨著自動控制領域的發展,攝像鏡頭的工藝和視覺識別算法越來越完善,基于這一基礎,無人機視覺跟蹤技術成為炙手可熱的研究領域。什么是無人機視覺跟蹤技術呢?首先無人機通過攝像頭進行視頻采集,對采集的信息進行存儲,并通過算法識別設定的跟蹤目標,執行預設任務。目前無人機視覺跟蹤技術已經廣泛運用在農業生產,軍事科研,物流運輸等領域。
在農業生產領域,無人機視覺追蹤系統運用在識別農作物的生長情況中,進行高空灌溉、驅趕害蟲等自動化農業管理;在民用領域,無人機通常使用視覺跟蹤系統識別人體手勢,讓用戶通過手勢操控無人機的升降和擺動;在生物調研領域,該技術更多是為了追蹤記錄野生瀕危動物的生活習慣,維護生態系統平衡。
無人機跟蹤系統是如何組成的呢?首先,無人機通過高清攝像頭模塊,實時采集圖像數據,系統通過信號檢測模塊和圖像預處理模塊將圖片信息轉變成數字信息,然后通過數據采集與處理模塊進行采樣、量化,并對各圖片參數進行分析過濾;將分析結果與設定的跟蹤目標比較,進行圖像識別跟蹤;跟蹤的圖像信息可以通過網絡傳輸到手機和電腦實時顯示。
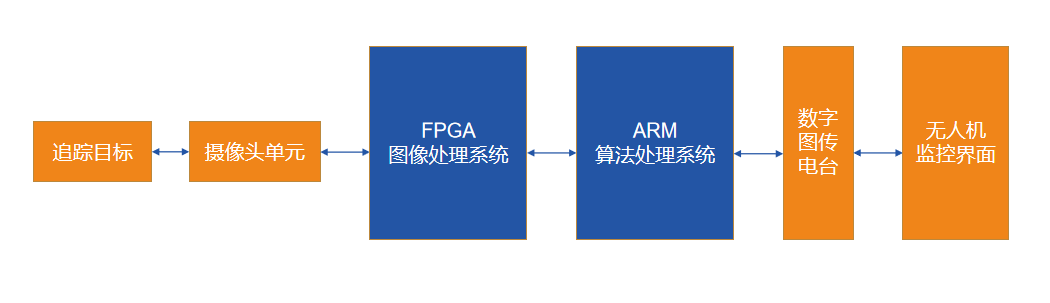 無人機視覺跟蹤流程圖
無人機視覺跟蹤流程圖
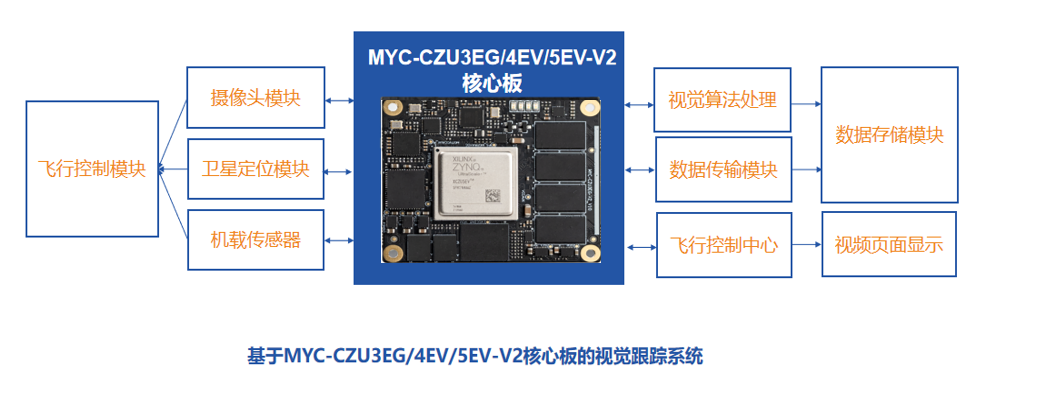
基于米爾電子MYC-CZU4EV/5EV-V2核心板設計的無人機視覺跟蹤系統,可以分為圖像信號采集、數據處理、信息展示三部分;圖像采集主要通過攝像頭收集圖像信息,再由FPGA芯片高速采集將圖片信息傳輸到數據處理單元,數據處理單元由VCU和MCU組成,負責將采集的圖像數據通過算法把設定好的跟蹤目標進行標注處理;而信息展示部分,則通過無線傳輸系統把信息同步顯示到無人機控制平臺和APP上面,實現實時視頻傳輸,掌握遠程定位追蹤功能。
 ??
??
MYC-CZU3EG/4EV/5EV-V2核心板,搭載功能全面的高規格Zynq UltraScale+ MPSoC芯片,其中芯片的PS端集成了APU ARM Cortex-A53處理器,RPU Cortex-R5處理器,頻率高達667MHz的Arm Mali-400 MP2(GPU)。需要注意的是,4EV/5EV芯片比3EG芯片多了一個視頻編解碼器單元 (VCU),支持H.264/H.265編解碼。芯片搭載內部存儲器,外部存儲器接口(DDR)和外設接口。這些外設接口主要包括USB總線接口,以太網接口,SD/eMMC接口,I2C總線接口,CAN總線接口,UART接口,GPIO等。高速接口如 PCIE,SATA,Display Port。
核心板圖片:
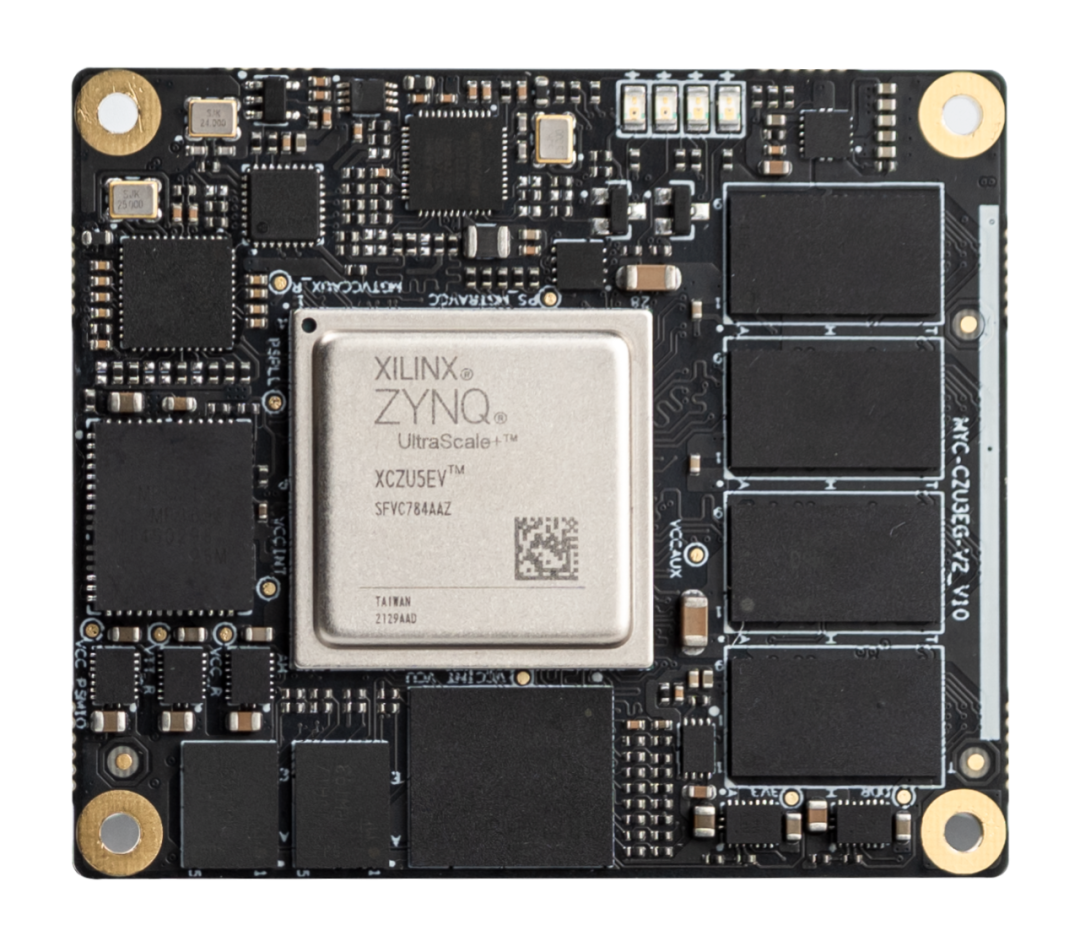
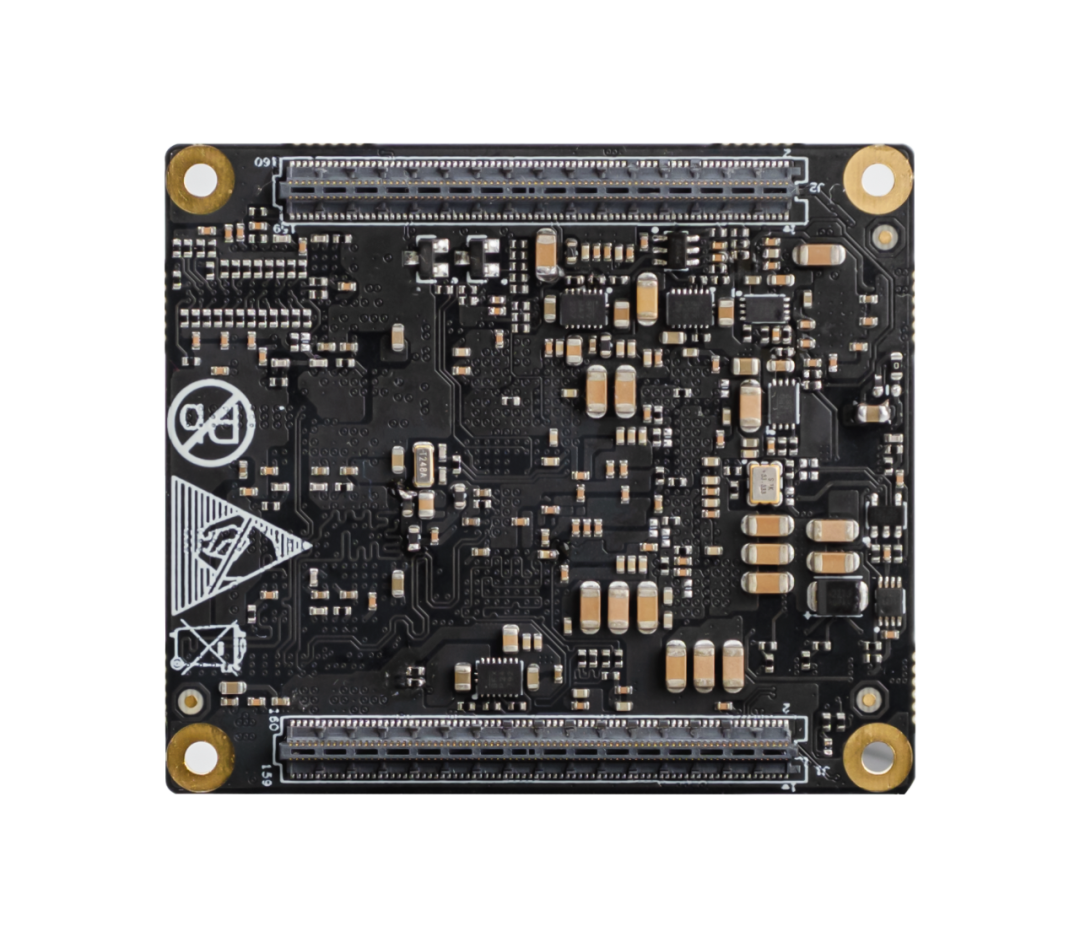 ?
?
板卡資料:
機械參數
類型 | 分類 | 參數 |
工作溫度 | 工業級 | -40℃~+85℃ |
商業級 | 0°C~+70°C | |
環境溫度 | -50℃~100°C | |
工作濕度 | 非冷凝 | 20%~90% |
冷凝 | 不支持 | |
核心板 | 3.3V/5A | |
核心板接口 | 2個160 Pin 0.5mm間距雙排高速高密度PCB連接器 | |
PCB規格 | 核心板 | 12層盲埋孔,沉金工藝生產,獨立的接地信號參考層,無鉛 |
機械尺寸 | 核心板 | 60.0mmx52.0mm,板厚1.6mm,核心板模塊整體厚度約為8.25mm |
底板資源
序號 | 資源種類 | |||
PS 單元 | 1 | 1 路千兆以太網 | ||
2 | 1路USB3.0typeC接口 | |||
3 | 1路Display Port接口 | |||
4 | 1路PCIE 2.1x1接口 | |||
5 | 1路SATA 3.1接口 | |||
6 | 1路CAN接口 | |||
7 | 1路RS232串口 | |||
8 | 1路TF卡接口 | |||
9 | 1路I2C接口 | |||
10 | 1個復位按鍵,2個用戶按鍵 | |||
11 | 1路JTAG | |||
12 | 內置實時時鐘 | |||
序號 | 資源種類 | |||
PL 單元 | 1 | XADC接口 | ||
2 | 1路Xilinx標準LPFMC接口 | |||
3 | ||||
4 | 1路LCD DIP/LPC接口,RGB 24bit,與HDMI復用顯示信號 | |||
5 | ||||
6 | 2路PMoD | |||
7 | 5個電源指示燈 | |||
8 | 4路SFP+模塊接口(注:僅4EV/5EV使用) | |||
9 | 1路Arduino接口 | |||
-
核心板
+關注
關注
5文章
990瀏覽量
29710 -
米爾電子
+關注
關注
0文章
104瀏覽量
439
發布評論請先 登錄
相關推薦
基于6U VPX XCVU9P+XCZU7EV的雙FMC信號處理板卡
12G-SDI高清視頻開發案例,讓4K視頻采集更便捷!基于Xilinx MPSoC高性能平臺
索尼FCB-EV9500M變焦攝像機:為無人機拍攝注入新活力
凱茉銳電子 索尼FCB-EV9500M模組與無人機云臺的完美結合

凱茉銳電子|FCB-EV9520L攝像頭在無人機測繪領域的應用與優勢
高速信號處理板卡設計原理圖:519-基于ZU19EG的4路100G光纖的PCIe 雷達信號處理卡
XCZU15EG設計原理圖:523(ZCU102E的pin兼容替代卡) 基于 XCZU15EG的雙 FMC通用信號處理板
KU115+ZU19EG+DSP6678的雙FMC 6U VPX處理板





 工商網監
工商網監
評論