 應用案例 | 當機械臂抓取物料時,如何精準拿捏尺度?
應用案例 | 當機械臂抓取物料時,如何精準拿捏尺度?
隨著工業自動化行業的不斷發展,可以看到越來越多的智能設備采用靈活、高效、精準的機械臂完成定位抓取、組裝等。最常見的是使用機器視覺應用,機器視覺將目標物體的圖像信息通過光學設備和傳感器獲取后,將其轉化為數字化信息(坐標位置和角度),并依據控制單元指導,使機器可以有效地執行任務。
但這次的任務中,我們選擇了更經濟的激光位移測距方案來實現機械臂的定位抓取,本期小明就來分享一下具體的應用情況~
場景需求
需要使用傳感器進行測距,以完成機械臂定位抓取物料
傳感器需支持485通訊模式
檢測距離500mm
精度要求1mm
選型分析
1、MLD23系列,量程從10mm到160mm,線性精度從0.01mm到0.32mm,適用于一般需求,對精度沒有超高要求,又想進行精準定位,普通光電滿足不了需求,可以考慮該系列產品,同時它還擁有模擬量信號輸出,可將測量數據以電壓或者電流形式傳輸到上位機。
2、MLD21系列,量程從70mm到400mm,線性精度從0.07mm到0.4mm,該系列特點是大量程,適合遠距離安裝,另外有模擬量和485通訊可供選擇,上位機信息交互更為豐富。
3、MLD33系列,量程從8mm到300mm,線性精度從0.008mm到0.3mm,這個系列的優勢就在于更高的精度把控,以及正反射系列可以測量透明體,是點激光位移中,不可多得的優勢產品,同樣有模擬量和422通訊接口。
選型推薦:MLD21-500N-485
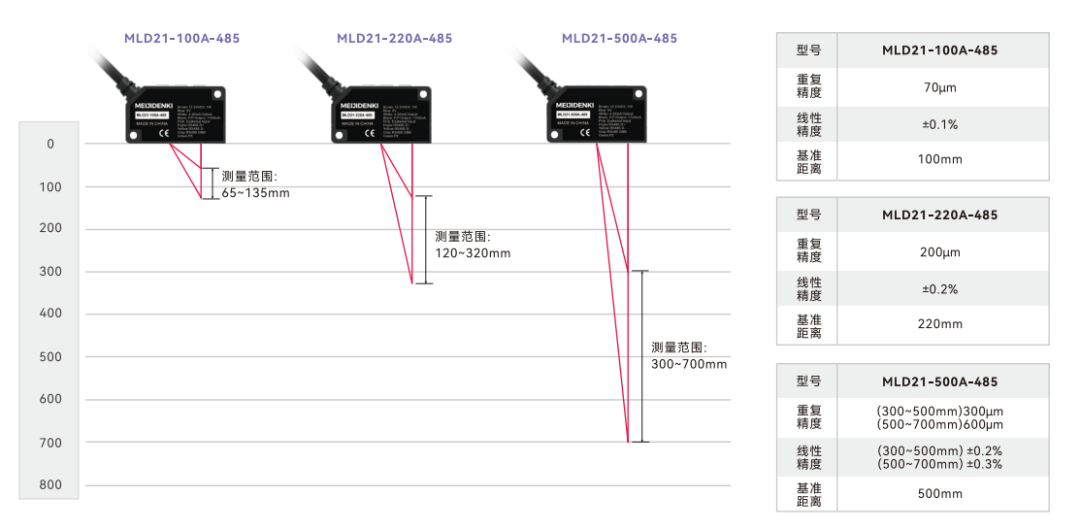
可選用明治大量程激光位移傳感器MLD21-500N-485,量程300-700mm
支持485通訊模式,符合客戶要求
精度可達0.4mm,可穩定進行定位
采用CMOS感光元件利用三角反射測量原理實現高精度檢測
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
工業
+關注
關注
3文章
1786瀏覽量
46415 -
自動化
+關注
關注
29文章
5519瀏覽量
79114
發布評論請先 登錄
相關推薦
凌科電氣新品發布:揭秘機械臂高可靠連接器解決方案
機械臂因其卓越的精準性、智能化水平和高效工作能力,廣泛應用于工業制造、物流倉儲、醫療手術等多個領域。其中,在機械臂高效運行的背后,工業級連接
“雙保險”鎖緊機制:YM28系列連接器為機械臂提供高牢靠的大電流連接
機械臂因其精準性、智能性、高效性等特點,在工業制造、物流倉儲、醫療手術等領域如魚得水、應用甚廣。在機械臂大展身手的背后,其實有一股不可忽視的

機械臂的高效運作,連接器起關鍵作用
? ? ?機械臂是靈活且可編程的自動化設備,在工業生產中發揮著至關重要的作用。其廣泛的應用領域涵蓋了裝配與搬運、焊接與噴涂、檢測與測量、碼垛等多個環節,極大地提升了生產效率與質量,并成功替代人工完成
OrangePi AIpro應用:機械臂應用開發指南
2024世界人工智能大會上,香橙派攜OrangePiAIpro20T在世博展覽館H1-A301展區亮相,給大家帶來AI+互動的沉浸式體驗。其中,搭載OrangePiAIpro開發板的智能機械臂吸引了



大象機器人開源協作機械臂機械臂接入GPT4o大模型!
本文已經或者同濟子豪兄作者授權對文章進行編輯和轉載 引言 隨著人工智能和機器人技術的快速發展,機械臂在工業、醫療和服務業等領域的應用越來越廣泛。通過結合大模型和多模態AI,機械臂能夠實

國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
又不必要。
從力學的角度分析,物件在空間只有6個自由度。因此為抓取和傳送在空間不同位置和方位物件,傳送機構也應具有6個自由度。
實驗程序流程
1、創建機械臂對象
2、機械
發表于 06-28 14:37
基于六維力傳感器的機械臂自動裝配應用
六維力傳感器是一種特殊的力覺傳感器,可以測量物體在笛卡爾坐標系下三個軸向的力和力矩,其內部采用高度敏感的材料和精密機械構造,可以為機械臂提供更高的測量精度,滿足不同場景下的測量需求。作為機械

機械臂技術的前沿探索:年度案例回顧!
在過去的幾年里,機械臂技術經歷了前所未有的發展,其應用領域從傳統的制造業擴展到了醫療、服務、物流等多個新興行業。這種跨界擴展得益于科技的飛速進步,尤其是在傳感器、控制系統和人工智能領域的突破。特別是

機械手的分寸感,靠這款傳感器來拿捏
機械臂是一種能夠模擬人類手臂運動的機械裝置,在工業領域應用非常廣泛,其包含的主要技術是驅動和控制;其末端定位精度是評價其性能的重要指標之一,而測量標定的方法則是提高機械

【開源獲獎案例】四軸機械臂控制系統
——來自迪文開發者論壇本期為大家推送迪文開發者論壇獲獎開源案例——四軸機械臂控制系統。工程師采用T5L智能屏,基于DGUS軟件“旋轉指示”控件實現機械臂的實時位置顯示,并通過串口控制

七軸開源協作機械臂myArm視覺跟蹤技術!
處理技術,使用ArUco標記的機械臂系統可以實現更高級的自動化功能,如精確定位、導航和復雜動作的執行。 本案例旨在展示結合ArUco標記和機械臂運動控制技術,實現對
開源六軸協作機械臂MechArm案例演示!
介紹 今天,我將向大家展示一個我獨立設計并實現的機械臂模型。這個模型的核心功能是實現實時的手勢追蹤——只需用手輕輕拖拽,機械臂就能立即跟隨你的動作進行移動。 我之所以想要創造這樣一個模





 工商網監
工商網監
評論