 4002-020-394速度傳感器的選型
4002-020-394速度傳感器的選型
大家好,我是【廣州工控傳感★科技】加速度傳感器事業部,張工。
4002-020-394加速度傳感器采用壓阻式MEMS,直流低頻響應,高分辨率。該加速度傳感器主要為最佳信噪比而設計,可信號調節放大輸出。產品可用量程從±2g~±200g,工作溫度為-25℃到85℃,是低頻響應測量的。
下面介紹4002-050-394加速度傳感器選型過程中比較關心的幾個指標:
1,量程 量程是我們在選擇傳感器時首先要確定的! 你選的傳感器是干什么用的,一般飛控,慣性導航系統可以選擇300度/秒,450度/秒,其他的可以根據自己的使用場景來選擇,比如一些高精密平臺所需范圍越小,精度越高。
2,零偏穩定性 零偏是指4002傳感器在零輸入狀態下的輸出,用較長時間的輸出平均值到輸入角速率的等效轉換來表示,即 觀測值在零偏差附近的分散程度。 零輸入狀態下的長期穩態輸出是一個穩定的隨機過程,即穩態輸出會圍繞均值上下波動,習慣上用均方誤差表示,定義為 零偏壓穩定性。 初始零偏誤差可以理解為靜態誤差,不會隨時間波動,可以通過軟件進行校準。
3,比例因子指傳感器輸出與輸入角速率的比值。 該比率由特定直線的斜率表示,它基于在整個輸入角速率范圍內測量的輸入和輸出數據,通過最小二乘擬合獲得,可以通過軟件進行校準。
4,角度隨機游走 當傳感器處于零輸入狀態時,衰減的輸出信號是白噪聲和慢變隨機函數的疊加。 漫反射隨機函數可用于確定偏差和偏差穩定性指標,白噪聲定義為單位檢測帶寬平方根下等效旋轉角速度的標準偏差。 這種白噪聲也可以用角度單位的隨機游走系數來表示。 隨機游走系數是指白噪聲產生的陀螺儀輸出誤差系數隨時間累積。 在外部條件基本不變的情況下,可以認為上面分析的各種噪聲的主要統計特征不隨時間變化。
5,抗振性對于傳感器的性能參數,首先要注意的是零偏穩定性。 長期以來,它一直被視為陀螺儀規范的絕對標準。 畢竟是陀螺儀分辨率的下限。 應該是傳感器性能的最佳指標! 但在實際應用中,加速度傳感器會因各種原因出現誤差,使用戶無法獲取實驗手冊中聲明的指標參數。 事實上,很多性能參數可以在后續的校準算法中得到改進,例如零偏移、比例因子、正交軸誤差、溫度漂移等。

4002-020-394 加速度傳感器的選擇:
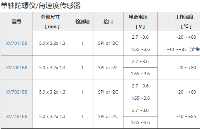
加速度計測量加速度、傾斜、振動或沖擊,使其適用于從可穿戴健身設備到工業平臺穩定系統的廣泛應用。 市場上有數百種加速度計,成本和性能各不相同。 . 加速度計在業界還沒有給出具體的行業定義標準。在選擇加速度計時要注意的幾個參數是:范圍、噪聲密度、隨機游走、運動中的偏差穩定性和帶寬。 這些參數類似于陀螺儀的參數。在選擇傳感器時,我們經常會看到消費級、工業級等詞。 消費級加速度計與集成在 IMU 中的中檔工業級加速度計的主要區別可以參考以下示例:

-
傳感器
+關注
關注
2548文章
50684瀏覽量
752023 -
速度傳感器
+關注
關注
2文章
128瀏覽量
18935
發布評論請先 登錄
相關推薦
PLC控制系統中的傳感器選型
ZC1202速度傳感器溫度傳感器視覺傳感器加速度傳感器的作用

西克光電傳感器選型原則

稱重傳感器的選型及注意事項
速度傳感器介紹 作用有哪些
思特威發布超小尺寸CMOS圖像傳感器SC020HGS
陀螺儀傳感器,IMU和加速度計的產品和選型
傳感器的主要分類和選型原則

傳感器選型攻略:從原理到應用
加速度傳感器的基本力學模型是什么
加速度傳感器原理及其應用






 工商網監
工商網監
評論