") RVIT15-60角度傳感器實(shí)際應(yīng)用
RVIT15-60角度傳感器實(shí)際應(yīng)用
大家好,我是【廣州工控傳感★科技】RVIT15-60角度傳感器事業(yè)部,張工。
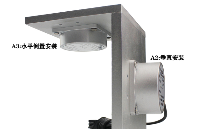
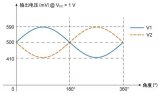
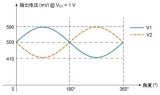
RVIT15-60角度傳感器采用四個(gè)印刷電路線圈和一個(gè)輕質(zhì)導(dǎo)電擾流板來實(shí)現(xiàn)超高性能和低轉(zhuǎn)動(dòng)慣量。傳感器工作時(shí),輕質(zhì)擾流板會(huì)隨著傳感器軸旋轉(zhuǎn),從而改變印刷電路線圈的電感。產(chǎn)生的變化通過獲得專利的自動(dòng)處理電路加以精密測量。該信號(hào)隨后被轉(zhuǎn)換為與轉(zhuǎn)軸角度成正比的線性直流電壓輸出。
RVIT15-60 角度傳感器的主體上有一個(gè)孔,可以安裝樂高軸。 當(dāng)連接到RCX時(shí),角度傳感器每旋轉(zhuǎn) 1/16 轉(zhuǎn)軸就會(huì)計(jì)數(shù)一次。向一個(gè)方向轉(zhuǎn)動(dòng)時(shí),計(jì)數(shù)增加,轉(zhuǎn)動(dòng)方向改變時(shí),計(jì)數(shù)減少。 計(jì)數(shù)與角度傳感器的初始位置有關(guān)。 初始化RVIT15-60角度傳感器時(shí),其計(jì)數(shù)值設(shè)置為0,如果需要,您可以通過編程將其重置。
如果RVIT15-60角度傳感器連接到電機(jī)和車輪之間的任何驅(qū)動(dòng)軸,則必須將正確的齒輪比計(jì)入讀數(shù)中,舉一個(gè)計(jì)算的例子,在您的機(jī)器人上,電機(jī)以 3:1 的傳動(dòng)比連接到主輪。角度傳感器直接連接到電機(jī)。所以它與驅(qū)動(dòng)輪的傳動(dòng)比也是3:1。 即RVIT15-60角度傳感器旋轉(zhuǎn)3圈,主動(dòng)旋轉(zhuǎn)1圈。RVIT15-60角度傳感器每轉(zhuǎn)16個(gè)單位,所以16*3=48個(gè)增量相當(dāng)于驅(qū)動(dòng)輪轉(zhuǎn)一圈。
現(xiàn)在,我們需要知道齒輪的周長來計(jì)算行進(jìn)的距離。幸運(yùn)的是,每個(gè)樂高齒輪輪胎上都標(biāo)有自己的直徑。我們選擇了最大的軸輪,直徑為81.6CM(樂高使用公制單位),所以它的周長是81.6×π=81.6×3.14≈256.22CM。現(xiàn)在已知量就在那里:齒輪行進(jìn)的距離是 48 除以角度記錄的增量,然后乘以256。讓我們總結(jié)一下。 令R為角度傳感器的分辨率(每轉(zhuǎn)計(jì)數(shù)),G為角度傳感器與齒輪之間的傳動(dòng)比。我們將I定義為角度傳感器每轉(zhuǎn)一圈的增量。即:I=G×R;
您可以輕松測量位置和速度。 當(dāng)輪子連接到機(jī)器人上(或齒輪用于移動(dòng)機(jī)器人)時(shí),機(jī)器人已經(jīng)移動(dòng)的距離可以從旋轉(zhuǎn)角度和輪子周長數(shù)中推斷出來。 然后您可以將距離轉(zhuǎn)換為速度,也可以將其除以經(jīng)過的時(shí)間。 其實(shí)計(jì)算距離的基本方程是:距離=速度×?xí)r間; 由此我們可以得到:速度=距離/時(shí)間。
控制車輪的RVIT15-60角度傳感器可以間接檢測障礙物。原理很簡單:如果電機(jī)在運(yùn)轉(zhuǎn)而齒輪不轉(zhuǎn)動(dòng),則說明您的機(jī)器被障礙物擋住了。這種技術(shù)使用起來非常簡單,而且非常有效;唯一的要求是移動(dòng)的輪子不要在地板上滑動(dòng)(或滑動(dòng)太多次),否則您將無法檢測到障礙物。如果在電機(jī)上安裝一個(gè)惰輪,則可以避免此問題,車輪不是由電機(jī)驅(qū)動(dòng)而是由設(shè)備的運(yùn)動(dòng)驅(qū)動(dòng):如果在驅(qū)動(dòng)輪旋轉(zhuǎn)期間惰輪停止,則您遇到了障礙物。
RVIT15-60角度傳感器在許多情況下都非常有用:控制手臂、頭部和其他可移動(dòng)部件的位置。值得注意的是,當(dāng)運(yùn)行速度過慢或過快時(shí),RCX 在準(zhǔn)確檢測和計(jì)數(shù)方面都會(huì)受到影響。事實(shí)上,問題不在于RCX,而在于它的操作系統(tǒng),如果速度超過其指定的限值,它會(huì)丟失一些數(shù)據(jù)。Steve Baker通過實(shí)驗(yàn)證明,50到300轉(zhuǎn)的轉(zhuǎn)速是比較合適的范圍,在這個(gè)范圍內(nèi)不會(huì)出現(xiàn)數(shù)據(jù)丟失的問題。 但是,在12rpm以下或1400rm以上的范圍內(nèi),會(huì)出現(xiàn)一些數(shù)據(jù)丟失的問題。在12rpm到50rpm的范圍內(nèi),RCX也偶爾會(huì)出現(xiàn)數(shù)據(jù)丟失的問題。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50664瀏覽量
751939 -
角度傳感器
+關(guān)注
關(guān)注
7文章
132瀏覽量
36158
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
MR角度傳感器與磁阻傳感器有什么區(qū)別
TMR角度傳感器的工作原理

多維科技高精度TMR3081角度傳感器芯片的離軸應(yīng)用案例
方向角度傳感器故障怎么解決
方向角度傳感器壞了有什么影響
方向角度傳感器零點(diǎn)位置怎么判斷
如何設(shè)計(jì)具有AMR角度傳感器的位置感應(yīng)系統(tǒng)呢?

安裝和使用AWS角度傳感器的注意事項(xiàng)
多維科技推出TMR3016和TMR3017角度傳感器芯片
多維科技推出TMR3016和TMR3017角度傳感器芯片





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論