 中斷是什么,PLC中斷,單片機中斷,那中斷能干什么?
中斷是什么,PLC中斷,單片機中斷,那中斷能干什么?
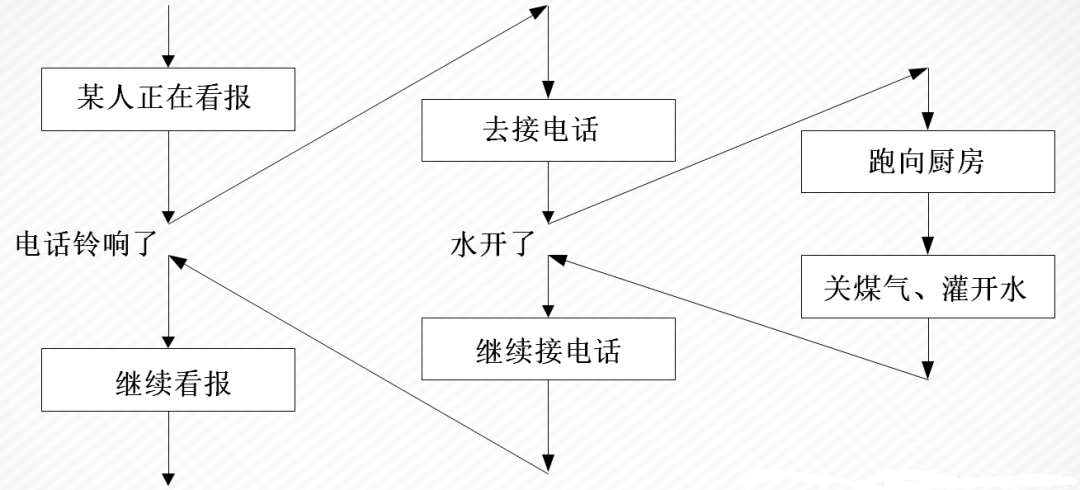
中斷的概念:中斷是計算機獨有的一種工作方式;在主程序執行的過程中,中斷主程序的執行;在執行子程序的過程中,中斷子程序的執行。中斷程序主要是為某些特定控制功能而設定。與子程序不同,中斷是隨機發生且必須立即響應的。需要執行中斷程序必須要有中斷源(引發中斷的信號)每個中斷信號都有一個編號加以識別,也就是我們說的中斷事件號
在200SMART系列PLC中共有三大類中斷事件,分別是:
I/O中斷:I/O 中斷包括上升/下降沿中斷、高速計數器中斷和脈沖串輸出中斷。CPU 可以為輸入通道 I0.0、I0.1、I0.2 和 I0.3(以及帶有可選數字量輸入信號板的標準 CPU 的輸入通道 I7.0 和 I7.1)生成輸入上升和/或下降沿中斷。可對這些輸入點中的每一個捕捉上升沿和下降沿事件。這些上升沿/下降沿事件可用于指示在事件發生時必須立即處理的狀況。
高速計數器中斷可以對下列情況做出響應:當前值達到預設值,與軸旋轉方向反向相對應的計數方向發生改變或計數器外部復位。這些高速計數器事件均可觸發實時執行的操作,以響應在可編程邏輯控制器掃描速度下無法控制的高速事件。
脈沖串輸出中斷在指定的脈沖數完成輸出時立即進行響應。脈沖串輸出的典型應用為步進電機控制。
通信中斷:CPU 的串行通信端口可通過程序進行控制。通信端口的這種操作模式稱為自由端口模式。在自由端口模式下,程序定義波特率、每個字符的位數、奇偶校驗和協議。接收和發送中斷可簡化程序控制的通信
時基中斷:基于時間的中斷包括定時中斷和定時器 T32/T96 中斷。可使用定時中斷指定循環執行的操作。循環時間位于 1 ms 到 255 ms 之間,按增量為 1 ms 進行設置。必須在定時中斷 0 的 SMB34 和定時中斷 1 的 SMB35 中寫入循環時間。
每次定時器到時時,定時中斷事件都會將控制權傳遞給相應的中斷程序。通常,可以使用定時中斷來控制模擬量輸入的采樣或定期執行 PID 回路。
將中斷程序連接到定時中斷事件時,啟用定時中斷并且開始定時。連接期間,系統捕捉周期時間值,因此 SMB34 和 SMB35 的后續變化不會影響周期時間。要更改周期時間,必須修改周期時間值,然后將中斷例程序重新連接到定時中斷事件。重新連接時,定時中斷功能會清除先前連接的所有累計時間,并開始用新值計時。
定時中斷啟用后,將連續運行,每個連續時間間隔后,會執行連接的中斷程序。如果退出 RUN 模式或分離定時中斷,定時中斷將禁用。如果執行了全局 DISI(中斷禁止)指令,定時中斷會繼續出現,但是尚未處理所連接的中斷程序。每次定時中斷出現均排隊等候,直至中斷啟用或隊列已滿。
使用定時器 T32/T96 中斷可及時響應指定時間間隔的結束。僅 1 ms 分辨率的接通延時 (TON) 和斷開延時 (TOF) 定時器 T32 和 T96 支持此類中斷。否則 T32 和 T96 正常工作。啟用中斷后,如果在 CPU 中執行正常的 1 ms 定時器更新期間,激活定時器的當前值等于預設時間值,將執行連接的中斷程序。可通過將中斷程序連接到 T32(事件 21)和 T96(事件 22)中斷事件來啟用這些中斷。
當多個中斷同時發生請求時,CPU對中斷響應有優先順序,從高到低的中斷順序分別是通信中斷、I/O中斷及最低的時基中斷。
需要注意的是,當比如在執行I/O中斷時,通信中斷又產生了,此時不會馬上去執行通信中斷,而是執行完正在執行的I/O中斷后再執行通信中斷。而如果同時產生的話就是按優先順序執行了
下表為不同的中斷事件號對應的中斷事件:
| 事件 | 說明 |
CR20s CR30s CR40s CR60s |
SR20/ST20 SR30/ST30 SR40/ST40 SR60/ST60 |
|---|---|---|---|
| 0 | I0.0 上升沿 | Y | Y |
| 1 | I0.0 下降沿 | Y | Y |
| 2 | I0.1 上升沿 | Y | Y |
| 3 | I0.1 下降沿 | Y | Y |
| 4 | I0.2 上升沿 | Y | Y |
| 5 | I0.2 下降沿 | Y | Y |
| 6 | I0.3 上升沿 | Y | Y |
| 7 | I0.3 下降沿 | Y | Y |
| 8 | 端口 0 接收字符 | Y | Y |
| 9 | 端口 0 發送完成 | Y | Y |
| 10 | 定時中斷 0(SMB34 控制時間間隔) | Y | Y |
| 11 | 定時中斷 1(SMB35 控制時間間隔) | Y | Y |
| 12 | HSC0 CV=PV(當前值 = 預設值) | Y | Y |
| 13 | HSC1 CV=PV(當前值 = 預設值) | Y | Y |
| 14-15 | 保留 | N | N |
| 16 | HSC2 CV=PV(當前值 = 預設值) | Y | Y |
| 17 | HSC2 方向改變 | Y | Y |
| 18 | HSC2 外部復位 | Y | Y |
| 19 | PTO0 脈沖計數完成 | N | Y |
| 20 | PTO1 脈沖計數完成 | N | Y |
| 21 | 定時器 T32 CT=PT(當前時間 = 預設時間) | Y | Y |
| 22 | 定時器 T96 CT=PT(當前時間 = 預設時間) | Y | Y |
| 23 | 端口 0 接收消息完成 | Y | Y |
| 24 | 端口 1 接收消息完成 | N | Y |
| 25 | 端口 1 接收字符 | N | Y |
| 26 | 端口 1 發送完成 | N | Y |
| 27 | HSC0 方向改變 | Y | Y |
| 28 | HSC0 外部復位 | Y | Y |
| 29 | HSC4 CV=PV | N | Y |
| 30 | HSC4 方向改變 | N | Y |
| 31 | HSC4 外部復位 | N | Y |
| 32 | HSC3 CV=PV(當前值 = 預設值) | Y | Y |
| 33 | HSC5 CV=PV | N | Y |
| 34 | PTO2 脈沖計數完成 | N | Y |
| 35 | I7.0 上升沿(信號板) | N | Y |
| 36 | I7.0 下降沿(信號板) | N | Y |
| 37 | I7.1 上升沿(信號板) | N | Y |
| 38 | I7.1 下降沿(信號板) | N | Y |
| 43 | HSC5 方向改變 | N | Y |
| 44 | HSC5 外部復位 | N | Y |
N表示無 Y表示有 紅色部分表示常用中斷事件號
中斷指令
ATCH:中斷連接,連接某中斷事件所要調用的程序段。
ENI:全局允許中斷,開放中斷處理功能。
DISI:全局禁止中斷,禁止處理中斷服務程序,但中斷事件仍然會排隊等候。
DTCH:中斷分離,將中斷事件號與中斷服務程序之間的關聯切斷,并禁止該中斷事件。
RETI:條件中斷返回,根據邏輯操作的條件,從中斷服務程序中返回。
CLR_EVNT:清空中斷隊列。
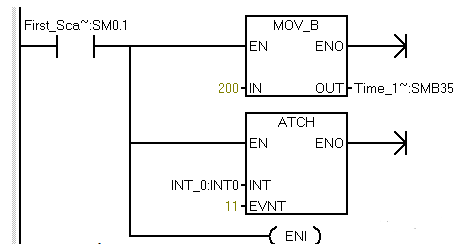
ATCH表示中斷連接指令,用于中斷事件號和中斷程序進行連接
INT管腳表示連接具體的中斷程序
EVNT表示中斷事件號
ENI為允許中斷指令。CPU在RUN模式下時是禁止中斷功能的,在使用中斷程序前必須使用允許開中斷指令
中斷分離指令DTCH
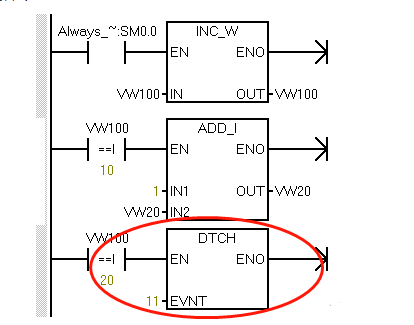
中斷分離指令解除中斷事件 EVNT 與所有中斷例程的關聯,并禁用中斷事件,需要再次激活中斷程序時,則需再次激活允許中斷連接
中斷返回 RETI
中斷有條件返回指令可用于根據前面的程序邏輯的條件從中斷返回,不再執行后面的程序段,在中斷程序中使用
中斷禁止指令 DISI

當指令執行后禁止所有中斷,即便發生中斷事件也不會執行中斷程序;需重新開啟允許中斷后才可再次使用中斷功能。中斷禁止和中斷分離有一定的區別,中斷分離是斷開某個中斷事件而中斷禁止是斷開整個中斷程序
清除中斷事件指令 CLR_EVNT
從中斷隊列中移除所有類型為 EVNT 的中斷事件。使用該指令可將不需要的中斷事件從中斷隊列中清除。如果該指令用于清除假中斷事件,則應在從隊列中清除事件之前分離事件。否則,在執行清除事件指令后,將向隊列中添加新事件。
中斷程序使用的過程中應需要注意以下幾點:
1、中斷程序應短小而簡單,執行時對其他處理越短越好
2、200SMART 最多使用128個中斷程序,中斷程序不能嵌套
3、中斷程序執行后會自動返回,也可在中途由邏輯控制使用中斷返回指令返回
4、中斷程序只需要和中斷事件連接一次(使用沿脈沖或SM0.1 );多個中斷事件可以連接一個中斷服務程序;一個中斷事件只能連接一個中斷程序
5、中斷程序不能通過條件調用,只有由用戶程序把中斷程序名稱和中斷事件聯系起來,并且需要允許中斷后才能進入等待中斷并隨時執行的狀態。
-
plc
+關注
關注
5008文章
13167瀏覽量
462195 -
計數器
+關注
關注
32文章
2254瀏覽量
94373 -
中斷程序
+關注
關注
0文章
34瀏覽量
8678
原文標題:中斷是什么,PLC中斷,單片機中斷,那中斷能干什么?
文章出處:【微信號:中泰PLC自動化教學,微信公眾號:中泰PLC自動化教學】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
單片機中斷系統介紹_51單片機中斷系統結構
8051單片機中斷系統結構及中斷控制原理
51單片機有幾個中斷?單片機的中斷號對應的中斷類型說明
單片機(AT89C51)中斷系統詳解和中斷系統應用實驗

單片機是怎么中斷的?
基于單片機的外部中斷實驗 中斷系統知識介紹





 工商網監
工商網監
評論