 合成孔徑雷達SAR的六種不同工作模式
合成孔徑雷達SAR的六種不同工作模式
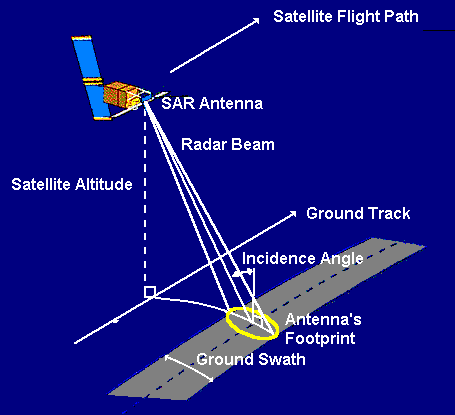
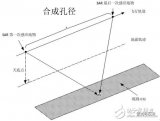
SAR(Synthetic Aperture Radar),即合成孔徑雷達,是一種主動式的對地觀測系統,可安裝在飛機和衛星等飛行平臺上,全天時全天候對地實施觀測,并具有一定的地表穿透能力。
合成孔徑雷達可以按許多不同方式進行工作,例如多系統工作方式,或者單個系統中包含不同模式的工作方式。下面,給出了六種合成孔徑雷達常見工作模式的基本介紹。
條帶合成孔徑雷達
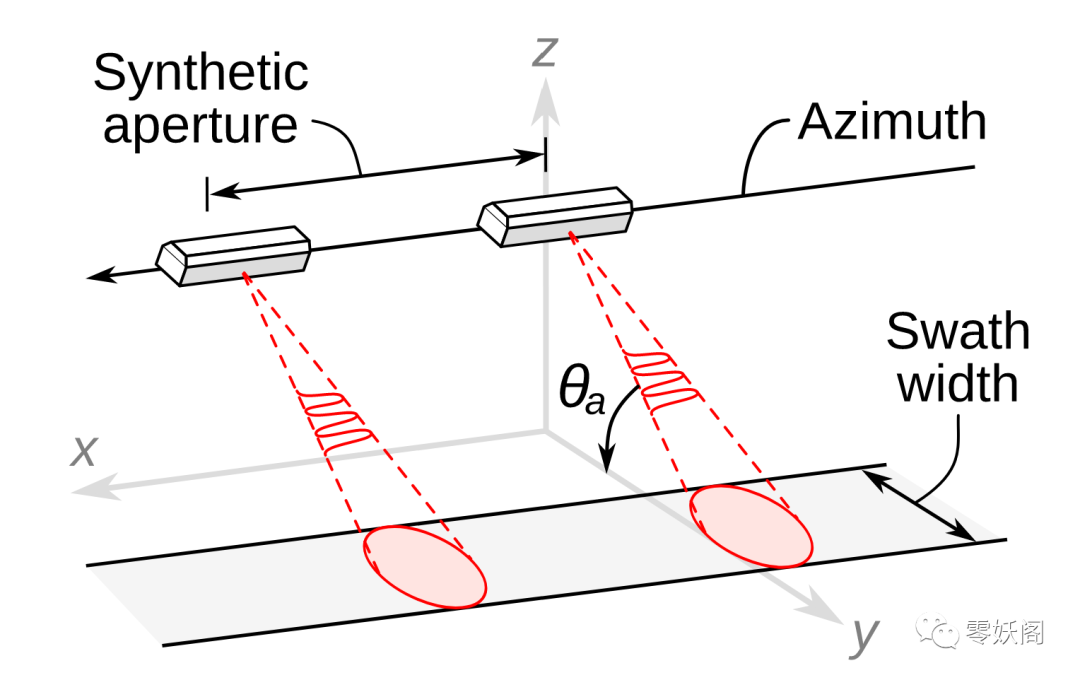
條帶合成孔徑雷達(Stripmap SAR)。在這種模式下,隨著雷達平臺的移動,天線的指向保持不變。此時,波束與運動平臺相對不變,波束以平臺運動速度照射成像區域。
條帶合成孔徑雷達的天線勻速掃過地面,得到的圖像是不間斷的。該模式對于地面的一個條帶進行成像,條帶的長度僅取決于雷達移動的距離,方位向的分辨率由天線的長度決定。
掃描合成孔徑雷達
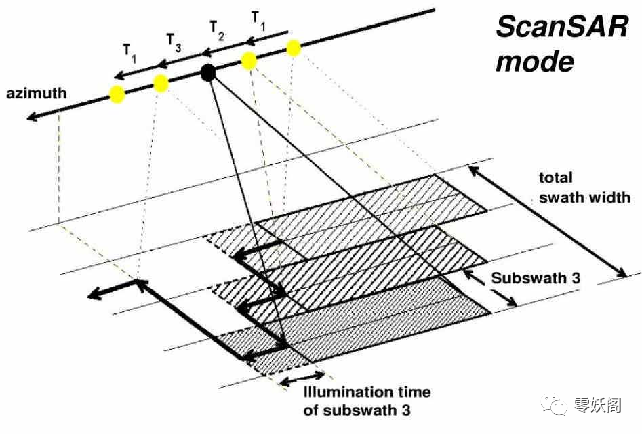
掃描合成孔徑雷達(ScanSAR)。這種模式與條帶模式的不同之處在于,在一個合成孔徑時間內,天線會沿著距離向進行多次掃描。通過控制波束速度(一般比平臺速度大),實現場景不同區域的快速成像。
通過這種方式,犧牲了方位向分辨率,而獲得了更寬的測繪帶寬。掃描模式能夠獲得的最佳方位分辨率等于條帶模式下的方位向分辨率與掃描條帶數的乘積。
聚束合成孔徑雷達
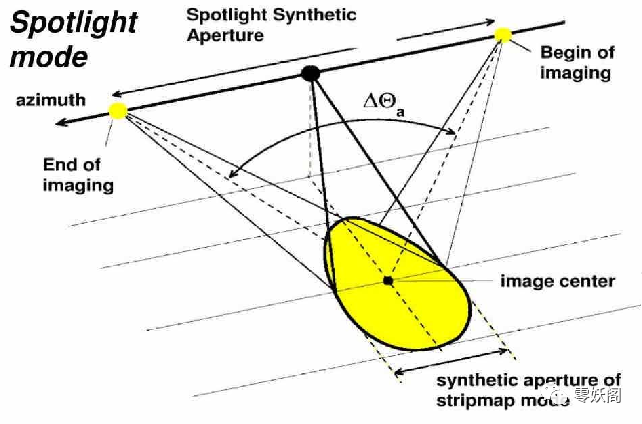
聚束合成孔徑雷達(Spotlight SAR)。這種模式下,平臺飛行過程中通過控制雷達波束照射成像場景同一位置,實現場景凝視成像。
通過擴大感興趣區域的天線照射波束角寬,可以提高條帶模式的分辨率。這一點可以通過控制天線波束指向,使其隨著雷達飛過照射區而逐漸向后調整來實現。波束指向的控制可以在短時間內模擬出一個較寬的天線波束,但是波束指向不可能永遠向后,最終還是要調回到前向,這就意味著地面覆蓋區域是不連續的,即一次只能對地面的一個有限圓域進行成像。
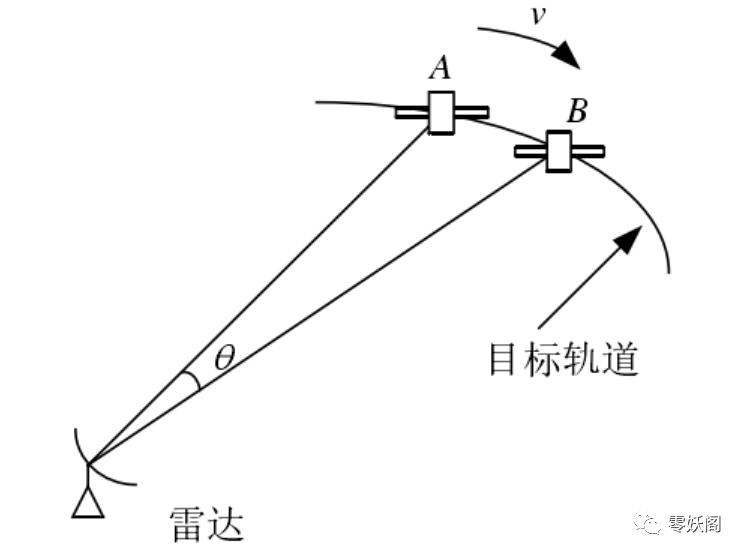
逆合成孔徑雷達
逆合成孔徑雷達(Inverse SAR,簡稱 ISAR)。到目前為止,我們考慮的都是目標靜止而雷達移動的情況,然而在目標移動而雷達靜止的情況下,SAR 同樣可以工作。這種相反的工作模式稱為 “逆合成孔徑雷達”。ISAR 的一個例子就是用地基雷達跟蹤衛星航跡。這個概念可以推廣到雷達和目標都運動的情況,例如用機載或星載合成孔徑雷達對波濤涌的海面上的艦船進行成像。
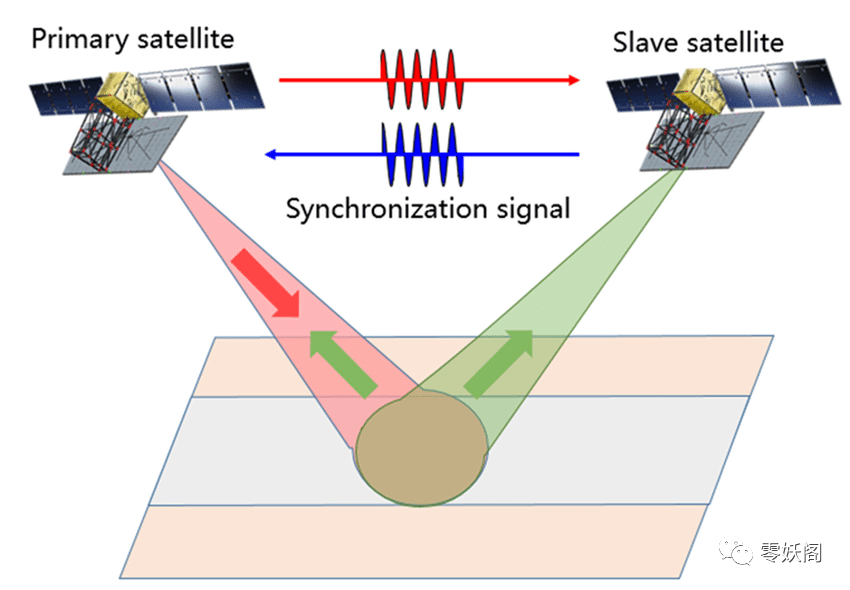
雙基地合成孔徑雷達
雙基地合成孔徑雷達(Bistatic SAR)。在這種作模式下接收機和發射機分置于不同的位置。對于遙感 SAR 來說,接收機和發射機通常很接近,可以近似成單基模式。
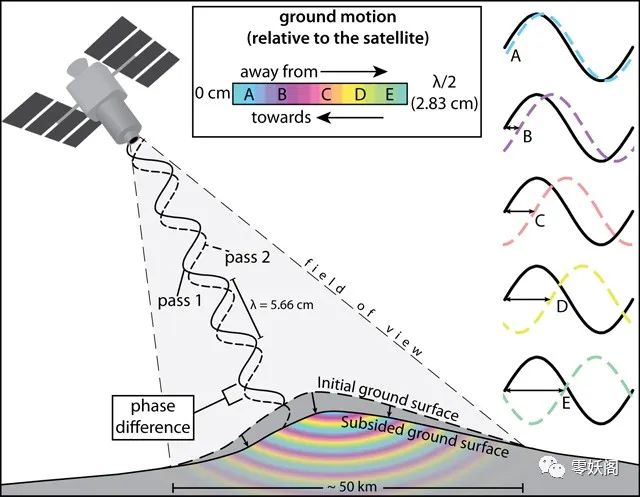
干涉合成孔徑雷達
干涉合成孔徑雷達(InSAR)。在這種工作模式下,可以通過復數圖像的后處理來提取地形高度和移位。將兩幅在同一空間位置(差分干涉 SAR)或間隔很小的兩個位置(地形高度干涉 SAR)獲得的復數圖像進行共軛相乘,就能得到一幅具有等高度線或等位線的干涉圖。
審核編輯:湯梓紅
-
SAR
+關注
關注
3文章
414瀏覽量
45901 -
衛星
+關注
關注
18文章
1703瀏覽量
66914 -
雷達
+關注
關注
50文章
2904瀏覽量
117348
原文標題:合成孔徑雷達 SAR 的六種不同工作模式
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
合成孔徑雷達系統綜合測控器的研制
怎么實現合成孔徑雷達衛星電磁兼容設計?
合成孔徑雷達的民用與直升機機載應用
合成孔徑雷達轉發式干擾分析
合成孔徑雷達的研究熱點解析
載合成孔徑雷達系統的接口實現與設計
合成孔徑雷達的工作原理_合成孔徑雷達的特點作用
合成孔徑的雷達研究熱點
合成孔徑雷達原理知識總結






 工商網監
工商網監
評論