 置位/復位觸發器的工作原理
置位/復位觸發器的工作原理
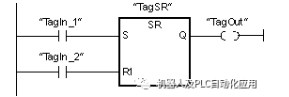
SR:置位/復位觸發器
說明
可以使用“置位復位觸發器”指令,根據輸入 S 和 R1 的信號狀態,置位或復位指定操作數的位。如果輸入 S 的信號狀態為“1”且輸入 R1 的信號狀態為“0”,則將指定的操作數置位為“1”。如果輸入 S 的信號狀態為“0”且輸入 R1 的信號狀態為“1”,則將指定的操作數復位為“0”。
輸入 R1 的優先級高于輸入 S。輸入 S 和 R1 的信號狀態都為“1”時,指定操作數的信號狀態將復位為“0”。
如果兩個輸入 S 和 R1 的信號狀態都為“0”,則不會執行該指令。因此操作數的信號狀態保持不變。
操作數的當前信號狀態被傳送到輸出 Q,并可在此進行查詢。
下表列出了“置位復位觸發器”指令的參數:
| 參數 | 聲明 | 數據類型 | 存儲區 | 說明 | |
|---|---|---|---|---|---|
| S7-1200 | S7-1500 | ||||
| S | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L 或常量 | 使能置位 |
| R1 | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能復位 |
| <操作數> | InOut | BOOL | I、Q、M、D、L | I、Q、M、D、L | 待置位或復位的操作數。 |
| Q | Output | BOOL | I、Q、M、D、L | I、Q、M、D、L | 操作數的信號狀態 |
示例
以下示例說明了該指令的工作原理:

滿足下列條件時,將置位操作數“TagSR”和“TagOut”:
操作數“TagIn_1”的信號狀態為“1”。
操作數“TagIn_2”的信號狀態為“0”。
滿足下列條件之一時,將復位操作數“TagSR”和“TagOut”:
操作數“TagIn_1”的信號狀態為“0”,且操作數“TagIn_2”的信號狀態為“1”。
操作數“TagIn_1”和“TagIn_2”的信號狀態為“1”。
| RS:復位/置位觸發器 |
說明
可以使用“復位置位觸發器”指令,根據輸入 R 和 S1 的信號狀態,復位或置位指定操作數的位。如果輸入 R 的信號狀態為“1”,且輸入 S1 的信號狀態為“0”,則指定的操作數將復位為“0”。如果輸入 R 的信號狀態為“0”且輸入 S1 的信號狀態為“1”,則將指定的操作數置位為“1”。
輸入 S1 的優先級高于輸入 R。當輸入 R 和 S1 的信號狀態均為“1”時,將指定操作數的信號狀態置位為“1”。
如果兩個輸入 R 和 S1 的信號狀態都為“0”,則不會執行該指令。因此操作數的信號狀態保持不變。
操作數的當前信號狀態被傳送到輸出 Q,并可在此進行查詢。
參數
下表列出了“復位置位觸發器”指令的參數:
| 參數 | 聲明 | 數據類型 | 存儲區 | 說明 | |
|---|---|---|---|---|---|
| S7-1200 | S7-1500 | ||||
| R | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L 或常量 | 使能復位 |
| S1 | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能置位 |
| <操作數> | InOut | BOOL | I、Q、M、D、L | I、Q、M、D、L | 待復位或置位的操作數。 |
| Q | Output | BOOL | I、Q、M、D、L | I、Q、M、D、L | 操作數的信號狀態 |
示例
以下示例說明了該指令的工作原理:
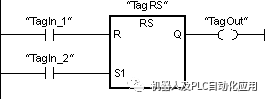
滿足下列條件時,將復位操作數“TagRS”和“TagOut”:
操作數“TagIn_1”的信號狀態為“1”。
操作數“TagIn_2”的信號狀態為“0”。
滿足下列條件之一時,將置位“TagRS”和“TagOut”操作數:
操作數“TagIn_1”的信號狀態為“0”,且操作數“TagIn_2”的信號狀態為“1”。
操作數“TagIn_1”和“TagIn_2”的信號狀態為“1”。
審核編輯:湯梓紅
-
西門子
+關注
關注
94文章
3009瀏覽量
115664 -
指令
+關注
關注
1文章
607瀏覽量
35653 -
觸發器
+關注
關注
14文章
1996瀏覽量
61057 -
SR
+關注
關注
1文章
35瀏覽量
23401 -
復位
+關注
關注
0文章
171瀏覽量
24199
發布評論請先 登錄
相關推薦
具有置位和復位功能的雙 JK 觸發器;正-邊-觸發-74HC_HCT109

具有置位和復位功能的雙 JK 觸發器;上升沿觸發-74HC_HCT109_Q100





 工商網監
工商網監
評論