") 掃描3D成像方法
掃描3D成像方法
▍飛行時(shí)間3D成像
飛行時(shí)間(TOF)相機(jī)每個(gè)像素利用光飛行的時(shí)間差來獲取物體的深度。 目前較成熟的飛行時(shí)間面陣相機(jī)商業(yè)化產(chǎn)品包括Mesa Imaging AG SR-4000,PMD Technologies Cam Cube 3.0,微軟Kinect V2等。
TOF成像可用于大視野、遠(yuǎn)距離、低精度、低成本的3D圖像采集,其特點(diǎn)是:檢測(cè)速度快、視野范圍較大、工作距離遠(yuǎn)、價(jià)格便宜,但精度低,易受環(huán)境光的干擾。例如Camcueb3.0可靠的深度精度(<3mm @ 4m),每個(gè)像素對(duì)應(yīng)一個(gè)3D數(shù)據(jù)。
▍掃描3D成像
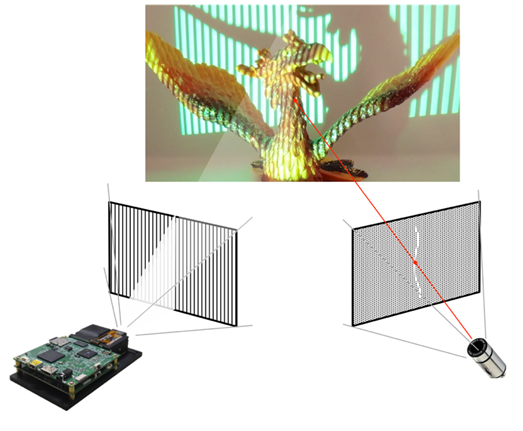
掃描3D成像方法可分為掃描測(cè)距、主動(dòng)三角法、色散共焦法。 掃描測(cè)距利用一條準(zhǔn)直光束通過測(cè)距掃描整個(gè)目標(biāo)表面實(shí)現(xiàn)3D測(cè)量,測(cè)量精度較高;主動(dòng)三角法基于三角測(cè)量原理,利用準(zhǔn)直光束、一條或多條平面光束掃描目標(biāo)表面完成3D成像,如圖2所示。但測(cè)量復(fù)雜結(jié)構(gòu)面形時(shí)容易產(chǎn)生遮擋,需要通過合理規(guī)劃末端路徑與姿態(tài)來解決。 色散共焦法通過分析反射光束的光譜,獲得對(duì)應(yīng)光譜光的聚集位置, 如圖3。色散共焦法適合測(cè)量透明物體、高反與光滑表面的物體。但缺點(diǎn)是速度慢、效率低;用于機(jī)械手臂末端時(shí),可實(shí)現(xiàn)高精度3D測(cè)量,但不適合機(jī)械手臂實(shí)時(shí)3D引導(dǎo)與定位,因此應(yīng)用場(chǎng)合有限。

線結(jié)構(gòu)光掃描三維點(diǎn)云生成示意圖
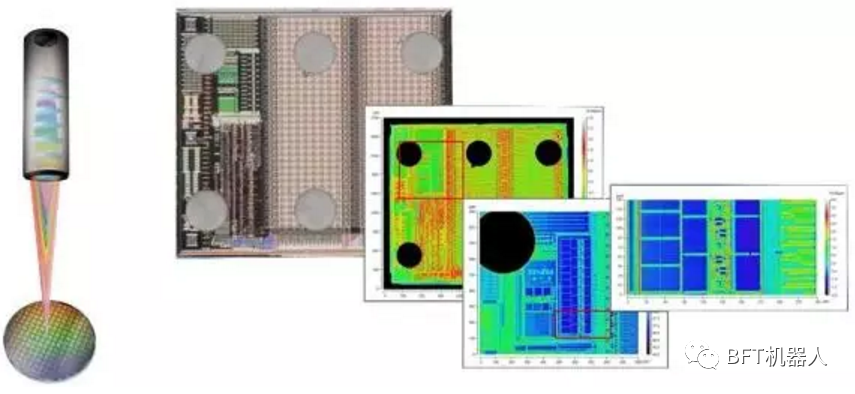
色散共焦掃描三維成像示意圖
▍結(jié)構(gòu)光投影3D成像
結(jié)構(gòu)光投影三維成像是目前機(jī)器3D視覺感知的主要方式。結(jié)構(gòu)光成像系統(tǒng)是由若干個(gè)投影儀和相機(jī)組成。基本工作原理是:投影儀向目標(biāo)物體投射特定的結(jié)構(gòu)光照明圖案,由相機(jī)攝取被目標(biāo)調(diào)制后的圖像,再通過圖像處理和視覺模型求出目標(biāo)物體的三維信息。 根據(jù)結(jié)構(gòu)光投影次數(shù)劃分,結(jié)構(gòu)光投影三維成像可以分成單次投影3D和多次投影3D方法。 單次投影3D主要采用空間復(fù)用編碼和頻率復(fù)用編碼形式實(shí)現(xiàn)。由于單次投影曝光和成像時(shí)間短,抗振動(dòng)性能好,適合運(yùn)動(dòng)物體的3D成像。但是深度垂直方向上的空間分辨率受到目標(biāo)視場(chǎng)、鏡頭倍率和相機(jī)像素等因素的影響,大視場(chǎng)情況下不容易提升。 多次投影3D具有較高空間分辨率,能有效地解決表面斜率階躍變化和空洞等問題。但也有如下不足之處: 1)對(duì)于連續(xù)相移投影方法,3D重構(gòu)的精度容易受到投影儀、相機(jī)的非線性和環(huán)境變化的影響; 2)抗振動(dòng)性能差,不合適測(cè)量連續(xù)運(yùn)動(dòng)的物體; 3)實(shí)時(shí)性差;不過隨著投影儀投射頻率和CCD/CMOS圖像傳感器采集速度的提高,多次投影方法實(shí)時(shí)3D成像的性能也在逐步改進(jìn)。 對(duì)于粗糙表面,結(jié)構(gòu)光可以直接投射到物體表面進(jìn)行視覺成像;但對(duì)于大反射率光滑表面和鏡面物體3D成像,結(jié)構(gòu)光投影不能直接投射到被成像表面,需要借助鏡面偏折法。 偏折法對(duì)于復(fù)雜面型的測(cè)量,通常需要借助多次投影方法,因此和多次投影方法有同樣的缺點(diǎn)。另外偏折法對(duì)曲率變化大的表面測(cè)量有一定的難度,因?yàn)闂l紋偏折后反射角的變化率是被測(cè)表面曲率變化率的2倍,因此對(duì)被測(cè)物體表面的曲率變化比較敏感,很容易產(chǎn)生遮擋難題。
▍立體視覺3D成像
立體視覺一般情況下是指從不同的視點(diǎn)獲取兩幅或多幅圖像重構(gòu)目標(biāo)物體3D結(jié)構(gòu)或深度信息。
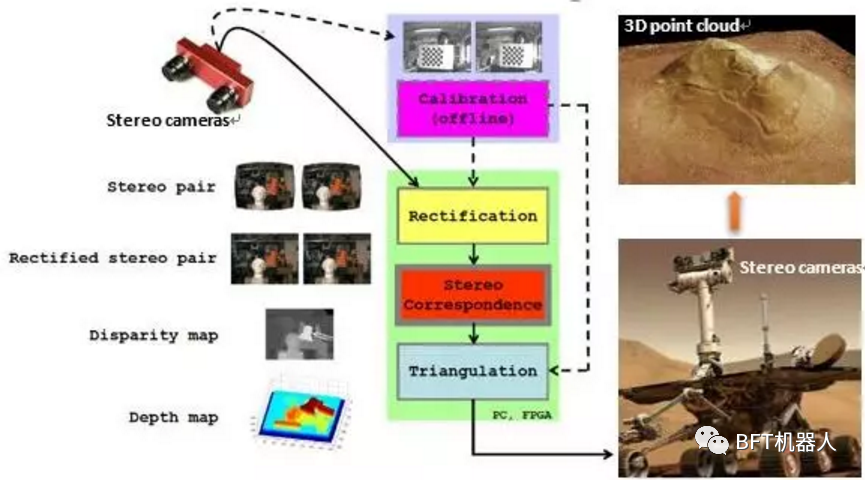
立體視覺三維成像示意圖
立體視覺可分為被動(dòng)成像和主動(dòng)成像兩種形式。
被動(dòng)視覺成像依賴相機(jī)接收到的由目標(biāo)場(chǎng)景產(chǎn)生的光輻射信息,常用于特定條件下的3D成像場(chǎng)合,如室內(nèi)等光線變動(dòng)不大的場(chǎng)景,或幾何規(guī)則明顯,控制點(diǎn)比較容易確定的工業(yè)零部件等。
主動(dòng)立體視覺是利用光調(diào)制(如編碼結(jié)構(gòu)光、激光調(diào)制等)照射目標(biāo)場(chǎng)景,對(duì)目標(biāo)場(chǎng)景表面的點(diǎn)進(jìn)行編碼標(biāo)記,然后對(duì)獲取的場(chǎng)景圖像進(jìn)行解碼,以便可靠地求得圖像之間的匹配點(diǎn),再通過三角法求解場(chǎng)景的3D結(jié)構(gòu)。主動(dòng)立體視覺的優(yōu)點(diǎn)是抗干擾性能強(qiáng)、對(duì)環(huán)境兼容性強(qiáng)(如通過帶通濾波消除環(huán)境光干擾),3D測(cè)量精度、重復(fù)性和可靠性高;缺點(diǎn)是對(duì)于結(jié)構(gòu)復(fù)雜的場(chǎng)景容易產(chǎn)生遮擋等問題。
▍三維成像工業(yè)應(yīng)用
基于結(jié)構(gòu)光測(cè)量技術(shù)和3D物體識(shí)別技術(shù)開發(fā)的機(jī)器人3D視覺引導(dǎo)系統(tǒng),可對(duì)較大測(cè)量深度范圍內(nèi)散亂堆放的零件進(jìn)行全自由的定位和拾取。
相比傳統(tǒng)的2D視覺定位方式只能對(duì)固定深度零件進(jìn)行識(shí)別且只能獲取零件的部分自由度的位置信息,具有更高的應(yīng)用柔性和更大的檢測(cè)范圍。可為機(jī)床上下料、零件分揀、碼垛堆疊等工業(yè)問題提供有效的自動(dòng)化解決方案。
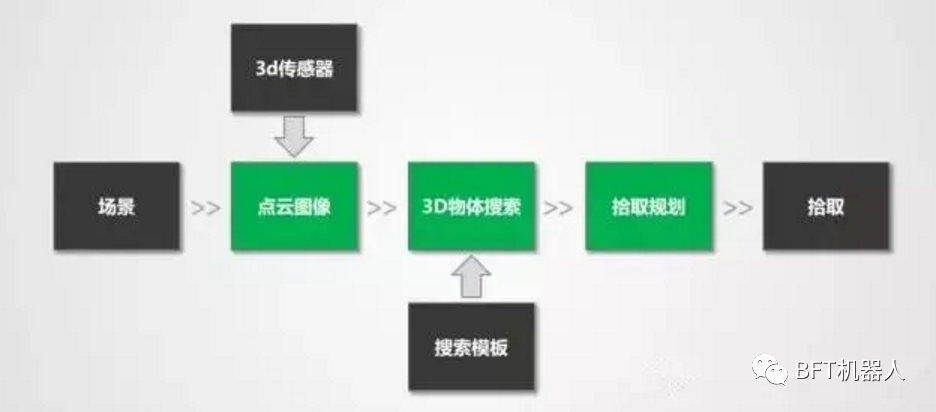
機(jī)器視覺3D引導(dǎo)系統(tǒng)框架
▍3D重建和識(shí)別技術(shù)
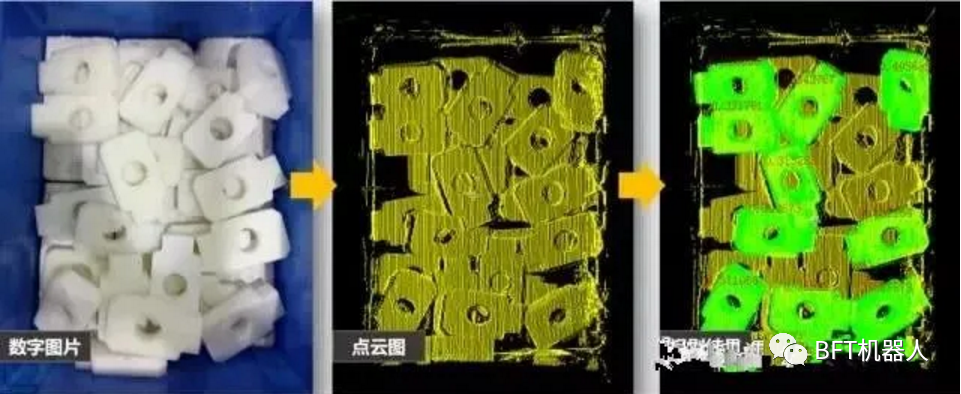
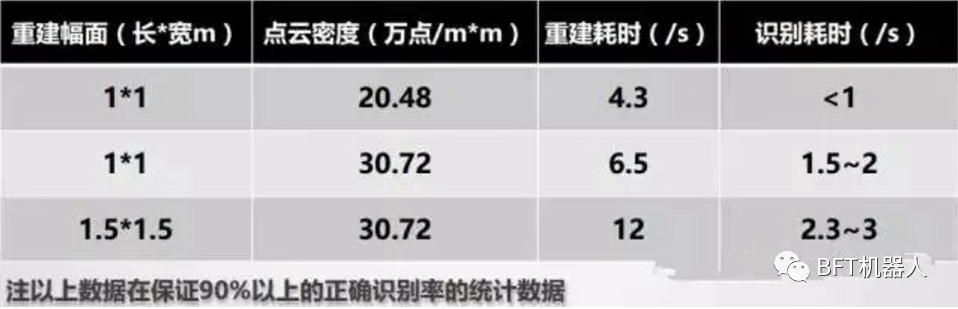
3D掃描儀可獲準(zhǔn)確并且快速地獲取場(chǎng)景的點(diǎn)云圖像,通過3D識(shí)別算法,可實(shí)現(xiàn)在對(duì)點(diǎn)云圖中的多種目標(biāo)物體進(jìn)行識(shí)別和位姿估計(jì)。
▍3D重建和識(shí)別效率
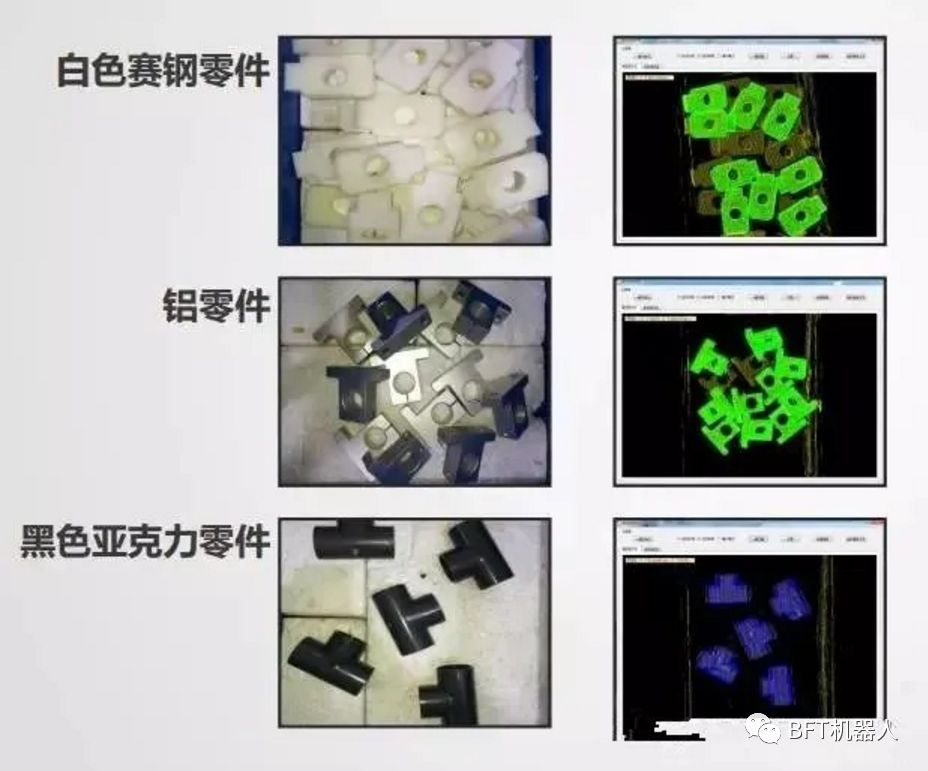
▍多種材質(zhì)識(shí)別效果測(cè)試
基于重建算法和識(shí)別算法,可對(duì)不同材質(zhì)的零件進(jìn)行穩(wěn)定的重建和識(shí)別,即便是反光比較嚴(yán)重的鋁材料及黑色零件都能獲得較好的重建和識(shí)別效果,可適用于廣泛的工業(yè)場(chǎng)景。
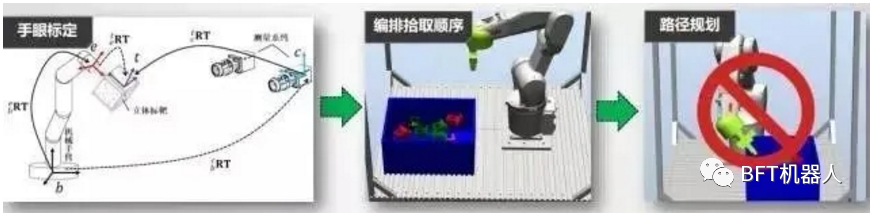
▍機(jī)器人路徑規(guī)劃
獲得零件信息后,要成功拾取零件還需要完成以下幾件事:
▍性能比較
類似于飛行時(shí)間相機(jī)、光場(chǎng)相機(jī)這類的相機(jī),可以歸類為單相機(jī)3D成像范圍,它們體積小,實(shí)時(shí)性好,適合隨動(dòng)成像眼在手系統(tǒng)執(zhí)行3D測(cè)量、定位和實(shí)時(shí)引導(dǎo)。但是,飛行時(shí)間相機(jī)、光場(chǎng)相機(jī)短期內(nèi)還難以用來構(gòu)建普通的隨動(dòng)成像眼在手系統(tǒng),主要原因如下:
1.飛行時(shí)間相機(jī)空間分辨率和3D精度低,不適合高精度測(cè)量、定位與引導(dǎo)。
2.對(duì)于光場(chǎng)相機(jī),目前商業(yè)化的工業(yè)級(jí)產(chǎn)品只有為數(shù)不多的幾家,如德國(guó)Raytrix,雖然性能較好,精度適中,但價(jià)格貴,使用成本太高。
結(jié)構(gòu)光投影3D系統(tǒng),精度和成本適中,有較好的應(yīng)用市場(chǎng)前景。它由若干個(gè)相機(jī)-投影儀組成的,如果把投影儀當(dāng)作一個(gè)逆向的相機(jī),可以認(rèn)為該系統(tǒng)是一個(gè)雙目或多目3D三角測(cè)量系統(tǒng)。
被動(dòng)立體視覺3D成像,目前在工業(yè)領(lǐng)域也得到較好應(yīng)用,但應(yīng)用場(chǎng)合有限。因?yàn)閱文苛Ⅲw視覺實(shí)現(xiàn)有難度,雙目和多目立體視覺要求目標(biāo)物體紋理或幾何特征清晰。
結(jié)構(gòu)光投影3D、雙目立體視覺3D都存在下列缺點(diǎn):體積較大,容易產(chǎn)生遮擋。針對(duì)這個(gè)問題雖然可以增加投影儀或相機(jī)覆蓋被遮擋的區(qū)域,但會(huì)增加成像系統(tǒng)的體積,減小應(yīng)用的靈活性。
▍總結(jié)
雖然光學(xué)3D視覺成像測(cè)量方法種類繁多,但能夠安裝在工業(yè)機(jī)器人上,組成一種合適的隨動(dòng)成像眼在手系統(tǒng),對(duì)位置變動(dòng)的目標(biāo)執(zhí)行3D成像測(cè)量、引導(dǎo)機(jī)器人手臂準(zhǔn)確定位和實(shí)施精準(zhǔn)操作的方法有限。
從工業(yè)應(yīng)用的角度來說,我們更關(guān)心的是3D視覺傳感器的精度、速度、體積與重量。鑒于機(jī)器人末端能夠承受的端載荷有限,允許傳感器占用的空間有限,傳感器在滿足成像精度的條件下,重量越輕體積越小也就越實(shí)用。
對(duì)于隨動(dòng)成像眼在手系統(tǒng),最佳3D成像方法是采用被動(dòng)單目(單相機(jī))3D成像方法,這樣不僅體積小、重量輕,也解決了雙目和多目多視圖遮擋難題。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50664瀏覽量
751943 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3351瀏覽量
92558 -
3D成像
+關(guān)注
關(guān)注
0文章
98瀏覽量
16044
原文標(biāo)題:全面詳解機(jī)器視覺三維成像方法及應(yīng)用
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于TI DLP技術(shù)的高精度3D掃描應(yīng)用
3D掃描的結(jié)構(gòu)光
高精度3D掃描如何實(shí)現(xiàn)?
機(jī)器視覺3D成像技術(shù)大全!
使用結(jié)構(gòu)光的3D掃描介紹
3D掃描儀成熱點(diǎn):可生成任意3D模型
最實(shí)惠的專業(yè)級(jí) 3D掃描儀:ACADEMIA? 3D 掃描儀
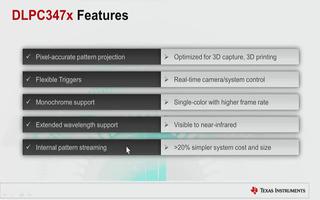
3D掃描與3D列印晶片DLPC347x的特點(diǎn)及應(yīng)用介紹
20秒完成全身3D掃描的醫(yī)學(xué)成像設(shè)備
什么是3D成像_3D成像應(yīng)用
關(guān)于3D視覺成像技術(shù)方案的簡(jiǎn)述

無需掃描! SPINDLE可實(shí)現(xiàn)3D高精度單分子定位成像!

幾種典型的3D視覺成像方案 機(jī)器人視覺3D成像方法比較
使用結(jié)構(gòu)光的3D掃描





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論