") PWM原理及其應(yīng)用
PWM原理及其應(yīng)用
什么是PWM
PWM(Pulse Width Modulation)簡(jiǎn)稱脈寬調(diào)制,是利用微處理器的數(shù)字輸出來(lái)對(duì)模擬電路進(jìn)行控制的一種非常有效的技術(shù),廣泛應(yīng)用在測(cè)量、通信、工控等方面。
PWM的頻率
是指在1秒鐘內(nèi),信號(hào)從高電平到低電平再回到高電平的次數(shù),也就是說(shuō)一秒鐘PWM有多少個(gè)周期,單位Hz。
PWM的周期
T=1/f,T是周期,f是頻率。
如果頻率為50Hz ,也就是說(shuō)一個(gè)周期是20ms,那么一秒鐘就有 50次PWM周期。
占空比
是一個(gè)脈沖周期內(nèi),高電平的時(shí)間與整個(gè)周期時(shí)間的比例,單位是% (0%-100%)
一個(gè)周期的長(zhǎng)度,如下圖所示。
其中,周期是一個(gè)脈沖信號(hào)的時(shí)間,1s內(nèi)的周期T次數(shù)等于頻率f,脈寬時(shí)間是指高電平時(shí)間。
上圖中,脈寬時(shí)間占總周期時(shí)間的比例,就是占空比。
比方說(shuō),周期的時(shí)間是10ms,脈寬時(shí)間是8ms,那么占空比是8/10= 80%,這就是占空比為80%的脈沖信號(hào)。
PWM就是脈沖寬度調(diào)制,通過(guò)調(diào)節(jié)占空比就可以調(diào)節(jié)脈沖寬度。
PWM原理
以STM32單片機(jī)為例,其IO口只能輸出高電平和低電平。
假設(shè)高電平為5V、低電平則為0V,那么要輸出不同的模擬電壓就要用到PWM。通過(guò)改變IO口輸出的方波的占空比,從而獲得使用數(shù)字信號(hào)模擬成的模擬電壓信號(hào)。
電壓是以一種脈沖序列被加到模擬負(fù)載上去的,接通時(shí)是高電平1,斷開(kāi)時(shí)是低電平0。接通時(shí)直流供電輸出,斷開(kāi)時(shí)直流供電斷開(kāi)。通過(guò)對(duì)接通和斷開(kāi)時(shí)間的控制,理論上來(lái)講,可以輸出任意不大于最大電壓值5V的模擬電壓。
比方說(shuō),占空比為50%那就是高電平時(shí)間一半,低電平時(shí)間一半。在一定的頻率下,就可以得到模擬的2.5V輸出電壓。那么75%的占空比,得到的電壓就是3.75V,如下圖所示。
也就是說(shuō),在一定的頻率下,通過(guò)不同的占空比即可得到不同大小的輸出模擬電壓,PWM就是通過(guò)這種原理實(shí)現(xiàn)數(shù)字模擬信號(hào)轉(zhuǎn)換的。
PWM應(yīng)用
LED呼吸燈
以經(jīng)常使用的呼吸燈舉例。
一般人眼睛對(duì)于80Hz以上刷新頻率則完全沒(méi)有閃爍感,那么我們平時(shí)見(jiàn)到的LED燈,當(dāng)它的頻率大于50Hz的時(shí)候,人眼就會(huì)產(chǎn)生視覺(jué)暫留效果,基本就看不到閃爍了,而是誤以為是一個(gè)常亮的LED燈。
由于頻率很高時(shí)看不到閃爍,占空比越大LED越亮,占空比越小LED越暗。所以,在頻率一定時(shí),可以用不同占空比改變LED燈的亮度,使其達(dá)到一個(gè)呼吸燈的效果。
PWM對(duì)電機(jī)轉(zhuǎn)速的控制
調(diào)節(jié)占空比可以實(shí)現(xiàn)不同電壓的輸出,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的調(diào)節(jié)。
對(duì)于直流電機(jī)來(lái)講,電機(jī)輸出端引腳是高電平電機(jī)就可以轉(zhuǎn)動(dòng),當(dāng)輸出端高電平時(shí),電機(jī)會(huì)轉(zhuǎn)動(dòng),但是是一點(diǎn)一點(diǎn)的提速,在高電平突然轉(zhuǎn)向低電平時(shí),電機(jī)由于電感有防止電流突變的作用是不會(huì)停止的,會(huì)保持這原有的轉(zhuǎn)速,以此往復(fù),電機(jī)的轉(zhuǎn)速就是周期內(nèi)輸出的平均電壓值,所以實(shí)質(zhì)上我們調(diào)速是將電機(jī)處于一種,似停非停,似全速轉(zhuǎn)動(dòng)又非全速轉(zhuǎn)動(dòng)的狀態(tài),那么在一個(gè)周期的平均速度就是我們占空比調(diào)出來(lái)的速度了。
在電機(jī)控制中,電壓越大,電機(jī)轉(zhuǎn)速越快,而通過(guò)PWM輸出不同的模擬電壓,便可以使電機(jī)達(dá)到不同的輸出轉(zhuǎn)速。
當(dāng)然,在電機(jī)控制中,不同的電機(jī)都有其適應(yīng)的頻率 頻率太低會(huì)導(dǎo)致運(yùn)動(dòng)不穩(wěn)定,如果頻率剛好在人耳聽(tīng)覺(jué)范圍,有時(shí)還會(huì)聽(tīng)到呼嘯聲。頻率太高時(shí),電機(jī)可能反應(yīng)不過(guò)來(lái),正常的電機(jī)頻率在 6-16kHZ之間為好。
PWM對(duì)舵機(jī)的控制
舵機(jī)的控制就是通過(guò)一個(gè)固定的頻率,給其不同的占空比來(lái)控制舵機(jī)不同的轉(zhuǎn)角。
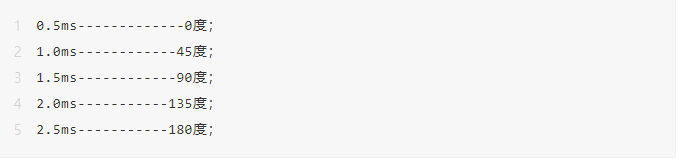
舵機(jī)的頻率一般為頻率為50HZ,也就是一個(gè)20ms左右的時(shí)基脈沖,而脈沖的高電平部分一般為0.5ms-2.5ms范圍,來(lái)控制舵機(jī)不同的轉(zhuǎn)角。
500-2500us的PWM高電平部分對(duì)應(yīng)控制180度舵機(jī)的0-180度。
以180度角度伺服為例,那么對(duì)應(yīng)的控制關(guān)系是這樣的:
下圖演示占空比從1ms變化到2ms時(shí),轉(zhuǎn)角的變化。
審核編輯:湯梓紅
-
模擬電路
+關(guān)注
關(guān)注
125文章
1554瀏覽量
102677 -
PWM
+關(guān)注
關(guān)注
114文章
5141瀏覽量
213398 -
脈寬調(diào)制
+關(guān)注
關(guān)注
3文章
215瀏覽量
38282 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
394瀏覽量
36916
原文標(biāo)題:PWM原理及其應(yīng)用
文章出處:【微信號(hào):ARM與嵌入式,微信公眾號(hào):ARM與嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

0基礎(chǔ)入門(mén)STM32單片機(jī)之綜合例程 ADC檢測(cè),串口通信,藍(lán)牙通信,pwm及其占空比的調(diào)整,#硬聲創(chuàng)作季
sys\bios的幾個(gè)疑惑如何解答
PWM逆變電路及其控制方法
PWM及其ADC應(yīng)用
一種可實(shí)現(xiàn)PFM和PWM及其自動(dòng)切換的數(shù)字控制電路
一種可實(shí)現(xiàn)PFM和PWM及其自動(dòng)切換的數(shù)字控制電路
一文讀懂PWM原理及其在電源中的應(yīng)用

深入理解PWM控制電機(jī)轉(zhuǎn)速的原理
PWM原理及其在電源中的應(yīng)用

PWM原理及其應(yīng)用
PWM原理及其應(yīng)用
PWM控制電機(jī)轉(zhuǎn)速應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論