") 【產(chǎn)品應(yīng)用】MX2000上如何拓展CAN接口?
【產(chǎn)品應(yīng)用】MX2000上如何拓展CAN接口?
MX2000平臺接口雖然豐富,但其本身不具備CAN接口。如果在實際產(chǎn)品應(yīng)用中,需要使用到CAN接口的時候那該怎么辦呢?本文將以新產(chǎn)品MX2000核心板為例講述如何解決該問題。
 ?概述
?概述
MX2000平臺上不具備CAN接口,但可通過我司CSM300(A)系列SPI(UART)轉(zhuǎn)CAN模塊進行拓展CAN接口。在實際產(chǎn)品應(yīng)用場景中如果需要使用CAN接口,則可以參考本文進行拓展、測試、評估。
 ?軟硬件準備
?軟硬件準備
硬件設(shè)計和連接使用SPI轉(zhuǎn)CAN功能時,需要將CSM300(A)的MODE引腳接至高電平(3.3V)。MCU的SPI接口與CSM300(A)的SPI接口連接,同時MCU需要提供GPIO與RST、INT、CTL0、CTL1引腳連接,實現(xiàn)對CSM300(A)的有效監(jiān)測與控制。若需要通過MCU對CSM300(A)進行配置,則需要額外的GPIO與CFG引腳連接。圖1是CSM300A的參考電路。不使用的模塊引腳只需懸空而不用連接,以免因電路連接不當從而造成模塊損壞。
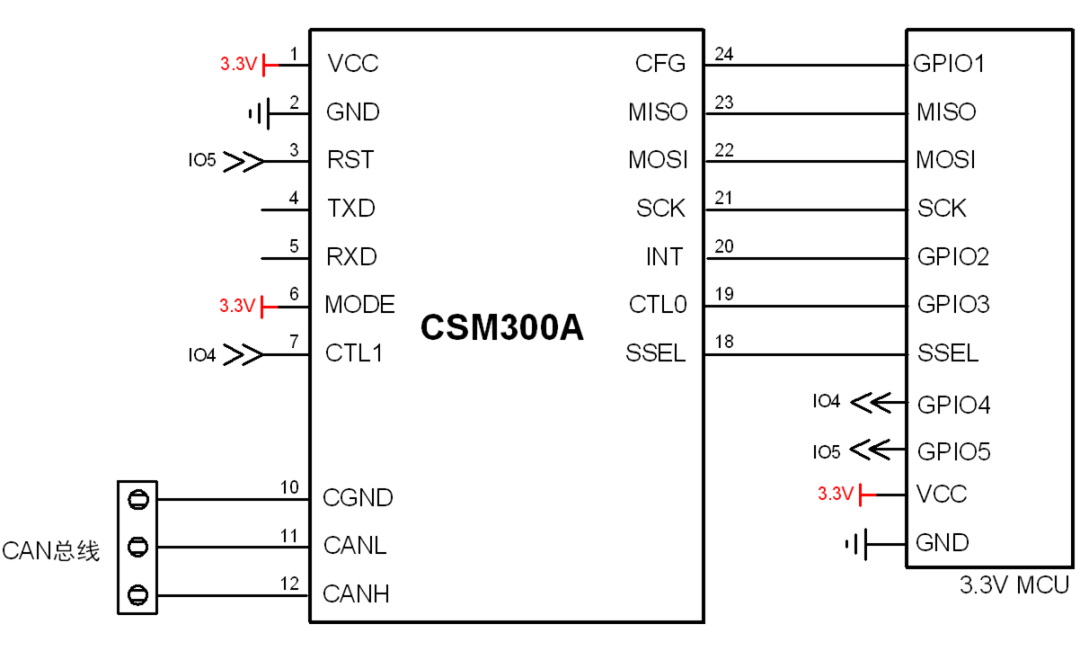
圖1CSM300參考電路圖如果僅需評估,則可以通過CSM-Eval評估套件將CSM300(A)和MX2000-EV-Board連接。CSM-Eval評估套件需要使用一路SPI接口和5個電平為3.3V的GPIO;MX2000-EV-Board在J28上引出了SPI1和若干個電平為3.3V的GPIO,具體接線可以參考表1所示。表1 CSM-Eval接MX2000-EV-Board引腳對應(yīng)表
CSM-Eval引腳 | MX2000-EV-Board端引腳 | CSM-Eval引腳 | MX2000-EV-Board端引腳 |
SSEL | SSI1_CE0 | CFG | PB27 |
SCK | SSI1_SCK | INT | PC20 |
MISO | SSI1_DI | CTL0 | PB24 |
MOSI | SSI1_DO | CTL1 | PB25 |
GND | GND | RST | PB26 |
VCC | 3.3V |
?軟件改動1. 修改設(shè)備樹在設(shè)備樹中增加如下節(jié)點:
&spi1 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&spi1_pe_normal>, <&spi1_pe_cs>; spi-max-frequency = <2000000>; num-cs = <1>; cs-gpios = <0>; ingenic,chnl = <0>; ingenic,allow_cs_same = <1>; ingenic,bus_num = <0>; ingenic,has_dma_support = <0>; ingenic,spi-src-clk = <1>;/*0.ext; 1.ssi*/
/delete-node/ spidev@0; // 刪除原有spidev節(jié)點 csm300@0 { compatible = "zhiyuan,csm300"; status = "okay"; spi-max-frequency = <1000000>; reg = <0>; gpios = <&gpb 24 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL0引腳 */ &gpb 25 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL1引腳 */ &gpb 26 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* RST引腳 */ &gpb 27 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CFG引腳 */ >; interrupt-parent = <&gpc>; interrupts = <20 IRQ_TYPE_LEVEL_LOW>; };};
2. 增加驅(qū)動并修改內(nèi)核配置
驅(qū)動文件請聯(lián)系FAE或者銷售工程師。將驅(qū)動文件csm300.c,放置于kernel/drivers/net/can/spi/文件夾下。并在該目錄的Makefile文件中加入以下內(nèi)容:
obj-$(CONFIG_CAN_CSM3XX) += csm300.o/*添加至文件末尾*/
同時在該目錄下的Kconfig文件中加入以下內(nèi)容:
config CAN_CSM3XX tristate "CSM3XX SPI CAN controllers" help Driver for CSM3XX SPI CAN controllers.
最后在menuconfig菜單中或defconfig配置文件中,打開對應(yīng)內(nèi)核配置,重新編譯內(nèi)核并燒錄到評估板中。
成功加載并且硬件連接無誤的情況下,會出現(xiàn)如下log打印。
[root@MX2000:~]# dmesg | grep csm[ 0.991286] csm300 check id response:[ 0.991356] csm300 spi0.0: csm300 check id succeed[ 0.991717] csm300 spi0.0 can0: csm300 successfully initialized.
如果硬件連接不正確,則會在初始化時候出現(xiàn)以下錯誤log打印。
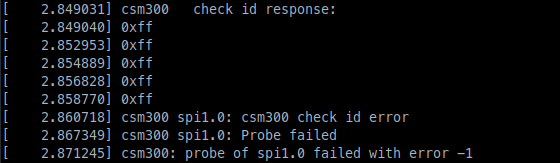
圖2CSM300(A)初始化錯誤LOG圖
?性能測試
將CSM-Eval評估套件通過USB CAN卡USBCAN-4E-U和電腦連接,框圖如圖3所示。
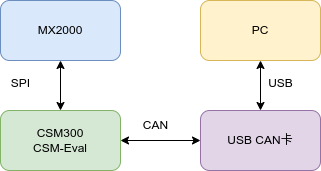
圖3連接框圖參考以下命令,對CAN進行配置:
[root@MX2000 ]# ip link set can0 down[root@MX2000 ]# ip link set can0 type can bitrate 1000000 #設(shè)定比特率[ 3205.411204] set bitrate is 1000000[root@MX2000 ]# ip link set can0 up #掛起can卡[ 3210.251020] csm300 check id response: [ 3210.251031] 0xf7 [ 3210.255100] 0xf8 [ 3210.257092] 0x2 [ 3210.259082] 0x13 [ 3210.260984] 0x1e [ 3210.451014] csm300 setup response: [ 3210.453010] 0xf7 [ 3210.456620] 0xf8 [ 3210.458610] 0x1 [ 3210.460599] 0x13 [ 3210.462498] 0x1d [ 3210.464486] csm300 setup succeed[root@MX2000 ]# echo 204800 > /sys/class/net/can0/tx_queue_len #設(shè)置發(fā)送隊列長度
MX2000端推薦使用以下命令進行測試。其中-g 后面所帶參數(shù)代表間隔時間(單位:s),經(jīng)過測試會直接影響丟包率,最優(yōu)為0.1。
[root@MX2000 ]# cangen -g 0.1 -I 0x122 -L 8 -D i can0 -n 204800
電腦端使用ZCANPRO專業(yè)軟件進行測試,得出結(jié)果在此幀率下丟包率為0%,如圖4所示。
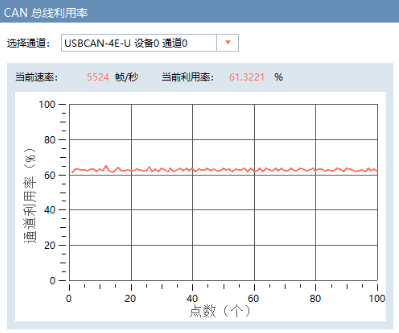
圖4性能測試結(jié)果圖
-
接口
+關(guān)注
關(guān)注
33文章
8500瀏覽量
150839 -
CAN
+關(guān)注
關(guān)注
57文章
2718瀏覽量
463377
發(fā)布評論請先 登錄
相關(guān)推薦
千兆以太網(wǎng)解決方案:MX2000核心板,高性能不高價

CAN/CANFD卡接口函數(shù)使用說明

CAN總線的接口類型
芯力特車規(guī)TVS產(chǎn)品助力CAN/LIN通訊接口保護

如何使用CAN盒測出目標CAN設(shè)備的波特率
如何將PSoC CAN控制器與NMEA 2000網(wǎng)絡(luò)結(jié)合使用?
全新Linux環(huán)境PCAN驅(qū)動程序發(fā)布!CAN/CAN FD通信體驗全面升級!

AI時代下的場效應(yīng)管功能運用與產(chǎn)品應(yīng)用
請問X-NUCLEO-NFC08A1 NFC讀卡器可以用CUBE-MX-NFC6或CUBE-MX-NFC7的擴展包嗎?
應(yīng)用探討:二路CAN接口的定制

CAN總線接口保護方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論