 PLC實例:順序控制指令,實現搬運動作
PLC實例:順序控制指令,實現搬運動作
今天咱們來談一談如何利用PLC來實現簡單的搬運動作。這個例子完美地用到了順序控制的指令,實際應用起來真的是非常方便,程序循環控制起來也是得心應手!
廢話不多說,進入我們今天的主題!
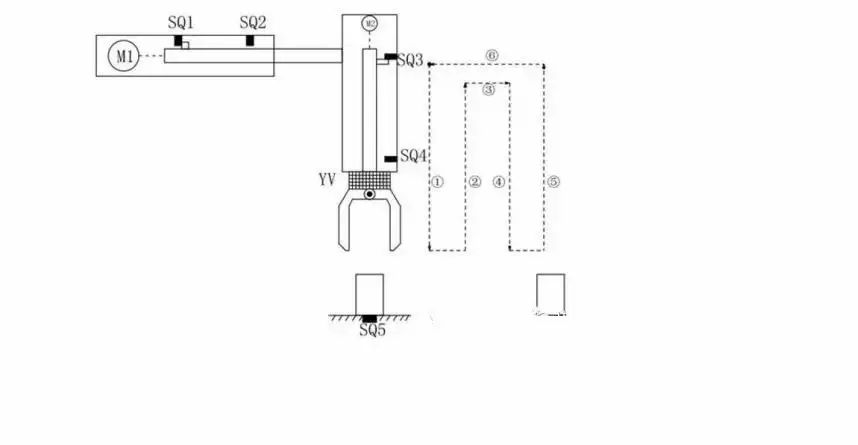
▲ 簡易機械手結構圖如圖所示
M1為控制機械手左右移動的電動機
M2為控制機械手上下升降的電動機
YV線圈用來控制機械手夾緊防松
SQ1為左到位檢測開關
SQ2為右到位檢測開關
SQ3為上到位檢測開關
SQ4為下到位檢測開關
SQ5為工件檢測開關

簡易機械手的控制要求如下:
機械手要將工件從工位A移到工位B 處;
機械手的初始狀態(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
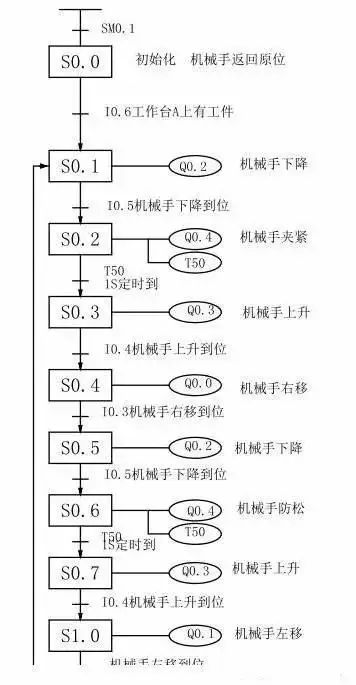
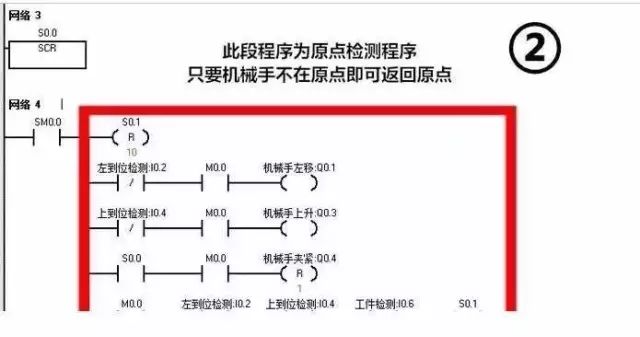
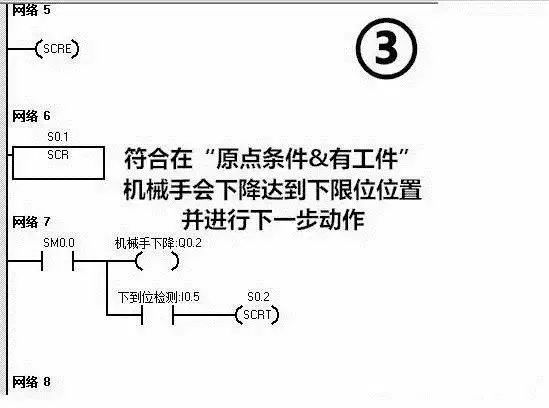
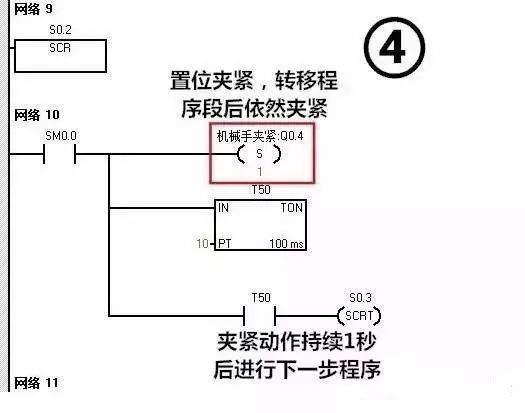
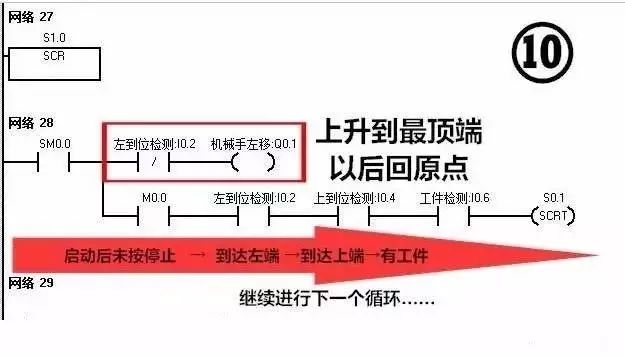
若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機械手按“原點→下降→夾緊→上升→右移→下降→放松→上升→左移→原點”的步驟工作。
動作圖編程前理順動作如何轉移:
定義符號表:

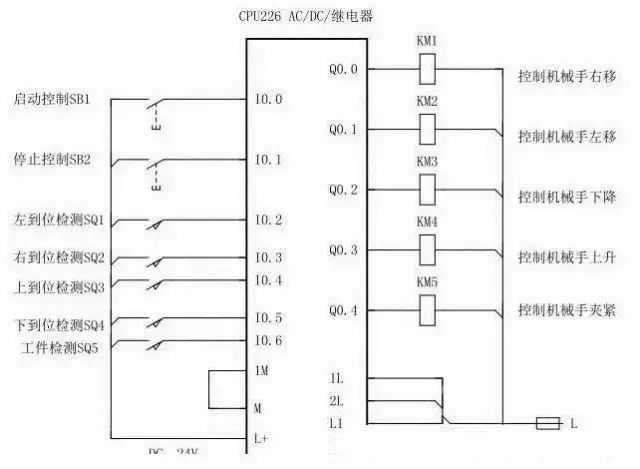
硬件的接線圖:
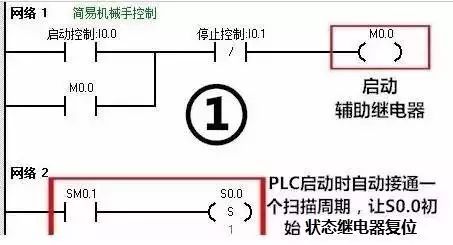
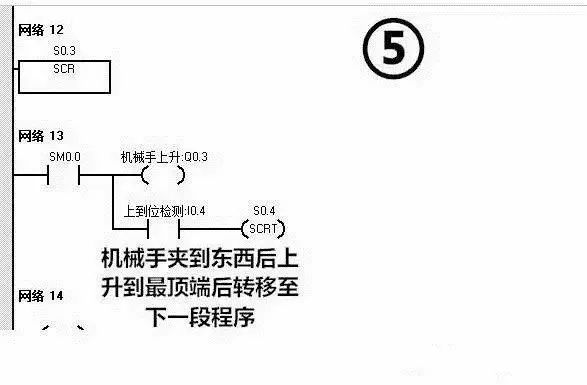
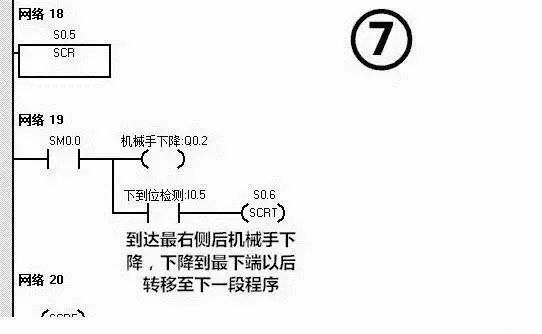
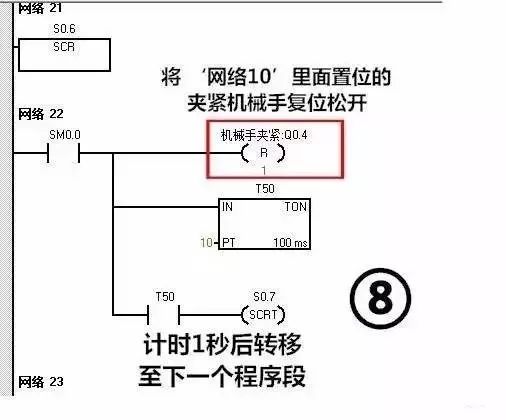
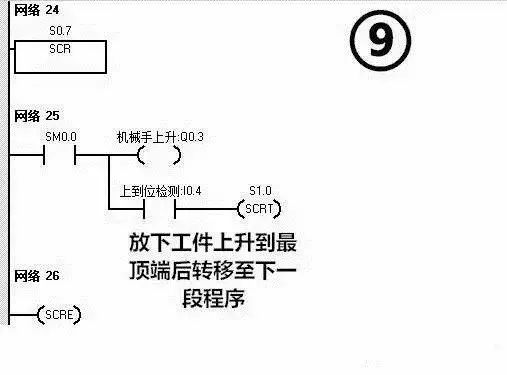
滿足所有動作的程序如下:

一大堆梯形圖看著真是眼花繚亂,不用擔心我們一段一段分析分析這個機械手是如何工作的!
---------------------------------------------------------------------------------------
其實這個圖沒有那么多的并行分支,所以轉移起來邏輯非常簡單!
--------------------------------------------------
----------------------------------------------
------------------------------------------------
----------------------------------------------
----------------------------------------------------
--------------------------------------------------------------
--------------------------------------------------
--------------------------------------------------
-
plc
+關注
關注
5008文章
13167瀏覽量
462188 -
電動機
+關注
關注
74文章
4101瀏覽量
96038 -
機械手
+關注
關注
7文章
333瀏覽量
29618
原文標題:【PLC】PLC實例:順序控制指令,實現搬運動作
文章出處:【微信號:設備維修屋,微信公眾號:設備維修屋】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
西門子S7-1200 PLC程序控制指令:跳轉與標簽指令
三菱PLC QnPHCPU編程手冊(過程控制指令)
PMC功能指令:程序控制指令
三菱plc如何實現順序控制_四種三菱plc順序控制編程方式實例
西門子S7-1200運動控制指令的使用


PLC編程案例之控制機械手實現簡單搬運流程






 工商網監
工商網監
評論