 FSM狀態機序列檢測的方法
FSM狀態機序列檢測的方法
(1)了解狀態機:什么是 摩爾型狀態機 ,什么是 米利型狀態機 ,兩者的區別是什么?一段式、二段式、三段式狀態機的區別?
(2)使用 狀態機產生序列 “11010110”,串行循環輸出該序列;
(3)使用 狀態機檢測“1101” ,串行輸入的測試序列為“11101101011010”,輸出信號為valid有效信號,檢測到時輸出高,否則為低, 考慮序列疊加情況 ,比如“1101101”,則有兩個“1101”,
即:

11101101011010,在第5個時鐘檢測到序列,下一個時鐘輸出高電平;
11101101011010,在第8個時鐘檢測到序列,下一個時鐘輸出高電平;
11101101011010,在第13個時鐘檢測到序列,下一個時鐘輸出高電平;
給出WORD或PDF版本的報告,包括但不限于文字說明、代碼、仿真測試圖等。
【解答】:
狀態機類型
狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作、完成特定操作的控制中心。有限狀態機簡寫為 FSM(Finite State Machine) ,主要分為2大類:
第一類,輸出只和狀態有關而與輸入無關,則稱為Moore狀態機;
第二類,輸出不僅和狀態有關而且和輸入有關系,則稱為Mealy狀態機。
** Mealy** 型 :輸出信號不僅取決于當前狀態,還取決于輸入;
** Moore** 型 :輸出信號只取決于當前狀態;
實現相同的功能時, Mealy型比Moore型能節省一個狀態 (大部分情況下能夠節省一個觸發器資源,其余情況下使用的資源相同,視狀態數和狀態編碼方式決定), Mealy型比Moore型輸出超前一個時鐘周期 。
三段式狀態機
一段式 :一個****always 塊 ,既描述狀態轉移,又描述狀態的輸入輸出,當前狀態用寄存器輸出。一段式寫法簡單,但是不利于維護,狀態擴展麻煩,狀態復雜時易出錯,不推薦;
二段式 :兩個****always 塊 ,時序邏輯與組合邏輯分開,一個always塊采用同步時序描述狀態轉移;另一個always塊采用組合邏輯判斷狀態轉移條件,描述狀態轉移規律以及輸出, 當前狀態用組合邏輯輸出,可能出現競爭冒險,產生毛刺,而且不利于約束 ,不利于綜合器和布局布線器實現高性能的設計;
三段式 :三個****always 塊 ,一個always模塊采用同步時序描述狀態轉移;一個always采用組合邏輯判斷狀態轉移條件,描述狀態轉移規律;第三個always塊使用同步時序描述狀態輸出,寄存器輸出。
三段式與二段式相比,關鍵在于根據狀態轉移規律,在上一狀態根據輸入條件判斷出當前狀態的輸出,從而在不插入額外時鐘節拍的前提下,實現了寄存器輸出。
狀態機序列檢測
使用三段式FSM有限狀態機進行序列檢測 ,使用 摩爾型狀態機 ,最終輸出與輸入無關。
使用狀態機檢測“1101”,串行輸入的測試序列為“11101101011010”,輸出信號為valid有效信號,檢測到時輸出高,否則為低, 考慮序列疊加情況 ,比如“1101101”,則有兩個“1101”,
即:

11101101011010,在第5個時鐘檢測到序列,下一個時鐘輸出高電平;
11101101011010,在第8個時鐘檢測到序列,下一個時鐘輸出高電平;
11101101011010,在第13個時鐘檢測到序列,下一個時鐘輸出高電平;
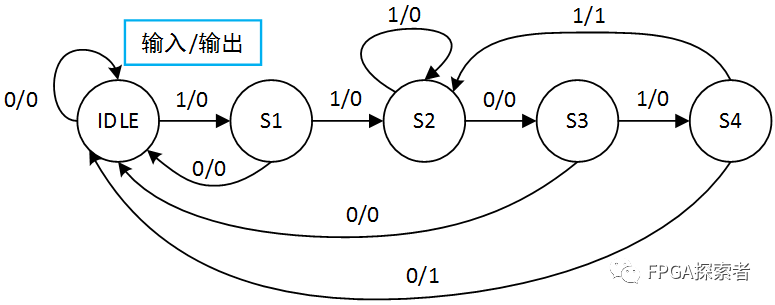
根據待檢測的序列“1101”確定狀態,其中:
S1為檢測到第1個有效位“1”;
S2為檢測到2個有效位“11”;
S3為檢測到3個有效位“110”;
S4位檢測到4個有效位“1101”;
IDLE為其他狀態;
IDLE:初始狀態,除S1~S4外的其他所有狀態
S1:1, 來1則到S2(11),否則回到IDLE;
S2:11, 來0則到S3(110),否則保持S2(11);
S3:110, 來1則到S4(1101),否則回到IDLE;
S4:1101, 來1則到S2(11),否則回到IDLE;
摩爾型,輸出和輸入無關,S4時無論輸入什么,都輸出1
即

三段式FSM的代碼:
/************************************************************
** Author :FPGA探索者公眾號
** Times :2020-7-7
************************************************************/
module FSM_SequDetection_1(
clk,
rst_n,
data_in,
data_valid
);
input clk;
input rst_n;
input data_in;
output reg data_valid;
//定義狀態,這里采用的獨熱碼(One-Hot),FPGA中推薦用獨熱碼和格雷碼(Gray)
//狀態較少時(4-24個狀態)用獨熱碼效果好,狀態多時格雷碼(狀態數大于24)效果好
parameter IDLE = 5'b00001;
parameter S1 = 5'b00010;
parameter S2 = 5'b00100;
parameter S3 = 5'b01000;
parameter S4 = 5'b10000;
reg [4:0] current_state; //現態
reg [4:0] next_state; //次態
//三段式FSM,第一段,同步時序邏輯,描述狀態切換,這里的寫法固定
always @ ( posedge clk )
begin
if(!rst_n ) begin
current_state<= IDLE;
end
elsebegin
current_state<= next_state;
end
end
//三段式FSM,第二段,組合邏輯,判斷狀態轉移條件,描述狀態轉移規律
//這里面用"="賦值和用"<="沒區別
always @ (*)
begin
if(!rst_n ) begin
next_state<= IDLE;
end
elsebegin
case(current_state )
IDLE: begin
if(data_in == 1 )
next_state<= S1;
else
next_state<= IDLE;
end
S1 : begin
if(data_in == 1 )
next_state<= S2;
else
next_state<= IDLE;
end
S2 : begin
if(data_in == 0 )
next_state<= S3;
else
next_state<= S2;
end
S3 : begin
if(data_in == 1 )
next_state<= S4;
else
next_state<= IDLE;
end
S4 : begin
if(data_in == 1 )
next_state<= S2;
else
next_state<= IDLE;
end
default : begin
next_state<= IDLE;
end
endcase
end
end
//三段式FSM,第三段,同步時序邏輯,描述狀態輸出,摩爾型輸出
always @ ( posedge clk )
begin
if(!rst_n ) begin
data_valid<= 1'b0;
end
elsebegin
case(next_state )
S4 : data_valid <= 1'b1;
default : data_valid <= 1'b0;
endcase
end
end
endmodule