 VASS 標準機器人的附加功能
VASS 標準機器人的附加功能
FB 951 F_ROB_NOT
F應用程序組件F_ROB_NOTF(FB951)在F應用程序部件F_FRG(FB950)的內部進行處理,并具有記錄機器人的附加功能:
可以通過PLC記錄機器人,也可以通過關閉機器人機柜記錄機器人。
然后機器人被停用,并且機器人的緊急停止被掩蓋。
當機器人PROFIsafe接口處于活動狀態且沒有連接終止通知時,機器人具有活動信號-1。
如果“IN_ROB_SN_NHL”和“IN_ROB_PSA”有1個信號,則可以注銷“IN_ROB_SP”。如果“IN_ROB_SN_NHL”和“IN_ROB_PSA”有1個信號,或者如果“IN_ROB_SN_NHL”和”IN_ROB_PSA“有0個信號,則可以注銷“IN_LogOff”。
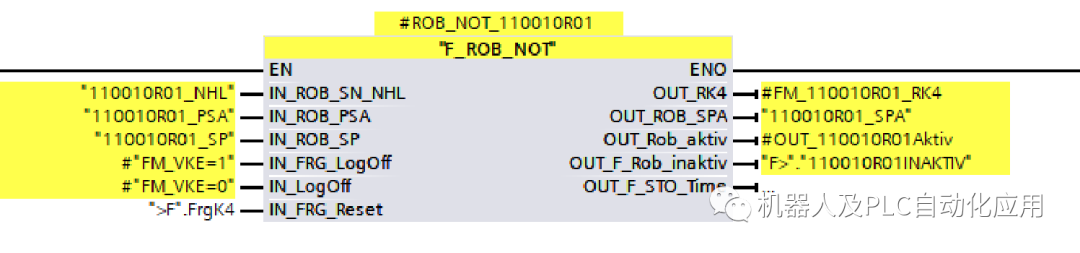
輸入參數
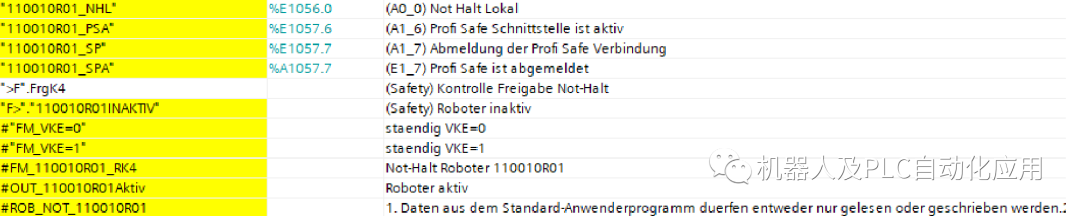
IN_ROB_SN_NHL-機器人本地緊急停止
IN_ROB_PSA-機器人PROFIsafe接口處于活動狀態
IN_ROB_SP-機器人通知連接終止
IN_FRG_LogOff-允許注銷
IN_LogOff-強制注銷
IN_FRG_Reset-啟用緊急停止和復位超時
輸出參數
OUT_RK4-安全程序緊急停止
OUT_ROB_SPA-PROFisafe已注銷
OUT_Rob_aktiv-機器人激活
OUT_F_Rob_inaktiv—機器人不活動
OUT_F_STO_Time-登錄或關閉機器人故障超時
注銷時超過了時間。在插入F應用程序組件F_ROB_NOT[FB951]之前,您必須從S7程序的塊容器中的項目庫中復制F應用程序部件F_FRG(FB 950)、F_TON(FB 945)和F_TOF(FB 946),盡管它們還不可用。部件中使用“F_Neustart”標志,必須按照規范進行編程。
Output:
OUT_Rob_aktiv
連接到機器人分配的系統標志。
輸出“OUT_F_Rob_inaktiv”具有1個信號,如果:
“OUT_Rob_aktiv”具有0信號。
如果出現以下情況,輸出“OUT_F_Rob_inaktiv”為0信號:
1.“OUT_Rob_aktiv”有1個信號。
Output:
OUT_F_Rob_inaktiv
連接到機器人指定的系統標志。
輸出“OUT_Rob_aktiv”具有1個信號:
1.“OUT_Rob_aktiv”具有0信號。
輸出“OUT_Rob_aktiv”具有0信號:
“OUT_Rob_aktiv”有1個信號。
-
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
應用程序
+關注
關注
37文章
3245瀏覽量
57615
原文標題:VASS 標準機器人急停控制:FB 951 F_ROB_NOT
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是工業機器人
nao機器人與其他機器人的區別
華南機器人應用培訓中心工業機器人培訓班招生
發現一個好機器人,《機器人的中秋祝福》中的機器人有眼部投影功能哦
機器人、協作機器人和移動機器人,你分的清楚嗎
工業機器人的技術原理
智能救援機器人的功能和作用
什么是服務機器人
水下機器人制作需要實現哪些功能呢
機器人是什么?
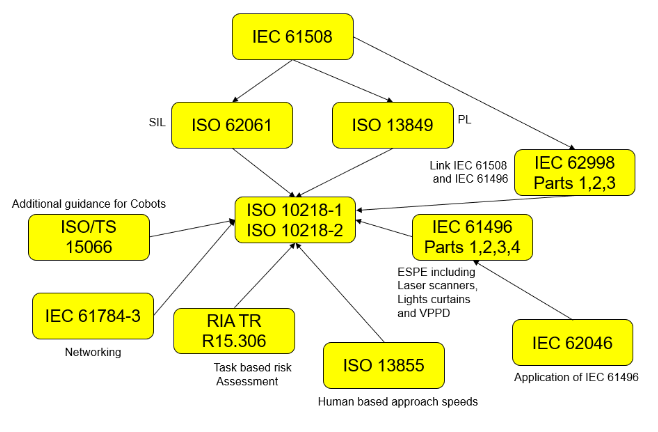
與工業機器人、協作機器人和移動機器人最相關的功能安全標準
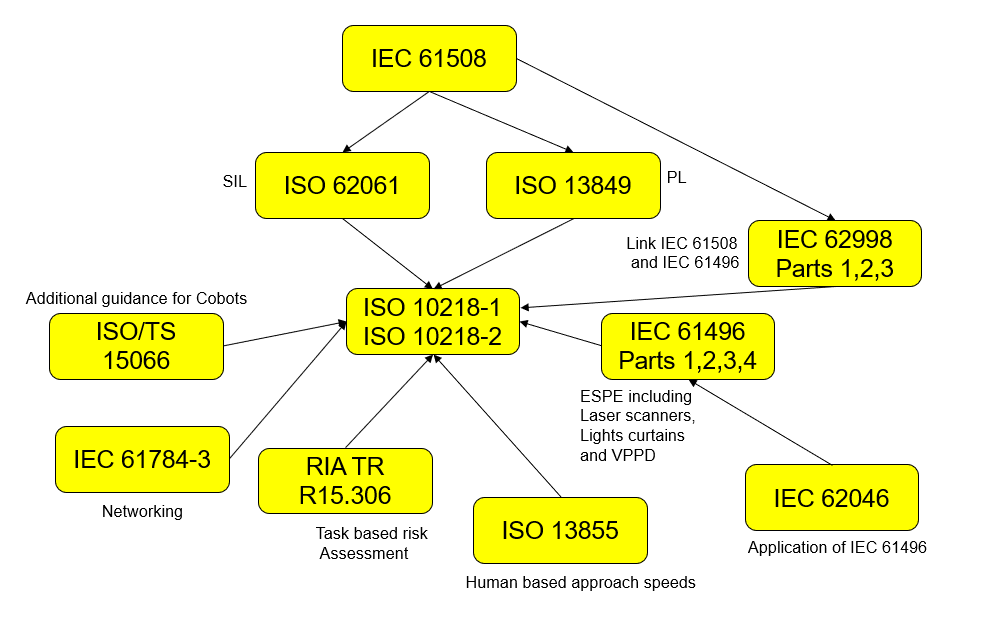
與工業機器人、協作機器人和移動機器人最相關的功能安全標準





 工商網監
工商網監
評論