") 快速精密DAC應用:硬件在環(huán)(HiL)
快速精密DAC應用:硬件在環(huán)(HiL)
閉環(huán)應用在當今許多新興技術(shù)中得到廣泛傳播。基本上,傳感器確定執(zhí)行器必須如何操作才能達到預期結(jié)果,不斷適應環(huán)境的變化。一個很好的例子是汽車的巡航控制,其中傳感器測量速度和其他參數(shù),駕駛員按照眾多電子控制單元(ECU)之一中的算法對油門進行操作。
現(xiàn)在想想巡航控制如何適應傾斜、風切變和重新武裝的變化。許多熟悉的概念在這里發(fā)揮作用:反應時間、延遲、階躍響應、壓擺率、過沖、負載調(diào)節(jié)。是的,我們都希望巡航控制系統(tǒng)在坡度變化時保持穩(wěn)定的速度,并在重新武裝時輕輕地達到巡航速度。它最終取決于閉環(huán)延遲,即自測量變化并采取行動進行補償以來所經(jīng)過的時間。閉環(huán)延遲涉及傳播速度、轉(zhuǎn)換時間和處理時間。高延遲(如低相位裕量)會使速度振蕩。
圖 1 描述了巡航控制的潛在駕駛場景。如速度圖所示,巡航控制系統(tǒng)對重新布防(階躍響應)和坡度變化(負載調(diào)節(jié))反應良好,但對風切變的反應為時已晚。功率圖顯示了巡航控制系統(tǒng)為適應不斷變化的條件所做的工作。
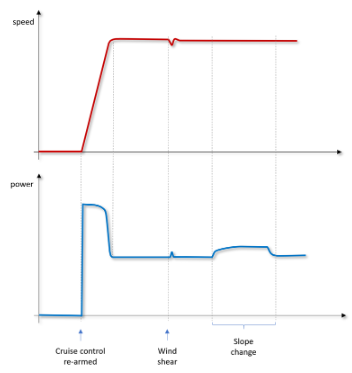
圖1.巡航速度控制場景中的速度和功率與時間的關(guān)系
讓我們考慮制造商的一面。假設(shè)您必須在 7 種不同的發(fā)動機上測試電子控制單元和巡航控制軟件,其中包含數(shù)百個測試用例。讓真正的汽車全天候巡視賽道是不切實際的。那么,為什么不將ECU連接到模擬汽車行為的設(shè)備呢?該模擬器可以 24/7 全天候運行,無需人工干預即可驗證軟件中的每個微小更改。
這就是我們所說的硬件在環(huán)(HiL)。該技術(shù)包括用能夠連接用于傳感和控制的信號的仿真器替換系統(tǒng)的一部分,目的是在多種條件下驗證另一部分。
汽車許多部件的電氣化促進了這一過程的自動化,因為ECU和仿真器之間的許多交互可以在電氣層面進行。
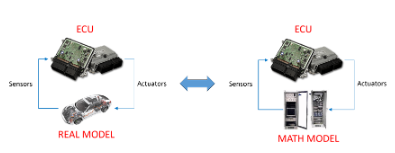
圖2.使用 HiL 用自動化實驗室測試取代現(xiàn)場測試
從傳感器捕獲的信號和驅(qū)動執(zhí)行器的信號可以是數(shù)字或模擬的,因此仿真器必須包括快速精確的A/D和D/A轉(zhuǎn)換器。從捕獲點到驅(qū)動點的延遲必須盡可能小,以最大限度地擴大可以使用仿真器的應用程序范圍。需要高分辨率和高精度來模擬某些傳感器和執(zhí)行器的大動態(tài)范圍。
仿真器還可以包括DSP或FPGA,用于處理輸入并在連續(xù)流上生成輸出。該器件的延遲會增加總數(shù),并且可能很大,尤其是在使用FIR濾波器的情況下。
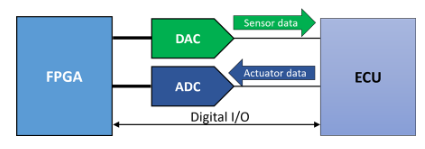
圖3.硬件在環(huán)系統(tǒng)測試ECU的概念圖
總延遲包括ADC和DAC的轉(zhuǎn)換時間、與FPGA之間的數(shù)字傳輸時間、FPGA中的處理時間和DAC輸出的建立時間。讓我們看一個使用真實設(shè)備的示例:
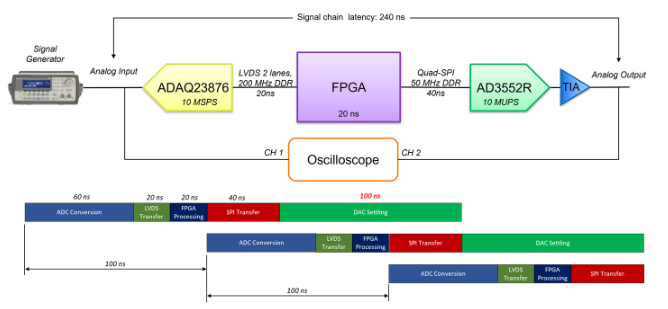
圖4.使用ADAQ23876和AD3552R實現(xiàn)硬件在環(huán)系統(tǒng)
| 元素 | 率 | 延遲 |
| ADAQ23876 | 10 兆字節(jié) | 100 納秒 |
| LVDS總線 | 800 幀/秒 | 20 納秒 |
| FPGA | 160 幀/秒 | 20 納秒 |
| QSPI 總線 | 400 幀/秒 | 40 納秒 |
| AD3552R | 10 消音器 | 10 納秒 |
| TIA 建立時間 | 100 納秒 |
表 1.硬件在環(huán)系統(tǒng)各元件的數(shù)據(jù)速率和延遲
某些操作可以重疊以提高信號鏈的更新速率,從而提供更高的信號帶寬。但是,閉環(huán)帶寬仍受總延遲的限制。換言之,器件無法補償持續(xù)時間小于信號鏈延遲的變化。例如,采集、數(shù)據(jù)傳輸和數(shù)據(jù)處理在DAC的建立時間內(nèi)進行,從而實現(xiàn)10 MSPS的采樣速率。
硬件在環(huán)仿真器用于多個技術(shù)領(lǐng)域:
ECU 驗證和測試。硬件在環(huán)系統(tǒng)模擬汽車的行為,產(chǎn)生ECU讀取的信號并檢查其產(chǎn)生的響應。接口可以是全電氣的,也可以通過執(zhí)行器(DAC驅(qū)動產(chǎn)生信號的傳感器)。
燃燒/電動/混合動力總成仿真。仿真可以在兩個級別進行:
功率級別。電動機使用電子負載進行仿真,HiL系統(tǒng)合成轉(zhuǎn)速和位置信號。
機械水平。硬件在環(huán)系統(tǒng)控制電制動器并合成轉(zhuǎn)速、扭矩和位置信號。
電池管理系統(tǒng) (BMS) 測試或電池組仿真。硬件在環(huán)系統(tǒng)模擬每個電池單元的電壓,并提供預期的電流。它還可以提供健康信號,例如溫度。
電動汽車/光伏逆變器驗證和測試。硬件在環(huán)系統(tǒng)控制電子負載并綜合負載處的電流和電壓測量值。
在測試響應時間短的設(shè)備時,硬件在環(huán)系統(tǒng)是強制性的。除此之外,HiL平臺的使用允許在多種場景中自動驗證這些設(shè)備,并提供廣泛的測試計劃,并確保在所有條件下都滿足嚴格的要求。這種覆蓋水平在現(xiàn)場測試中是不切實際的。
HiL的一個關(guān)鍵部分是信號接口,特別是模擬I/O,它必須快速和準確,需要新的精密ADC和DAC寬度。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752142 -
dac
+關(guān)注
關(guān)注
43文章
2272瀏覽量
190852 -
ecu
+關(guān)注
關(guān)注
14文章
881瀏覽量
54409
發(fā)布評論請先 登錄
相關(guān)推薦
便攜式--硬件在環(huán)仿真(HIL)
硬件在環(huán)(HIL)測試系統(tǒng)架構(gòu)
選擇硬件在環(huán)(HIL)測試系統(tǒng)I/O接口
探究HIL硬件在環(huán)測試
關(guān)于高級硬件在環(huán)(HIL)您想要了解的十個問題
精密DAC如何快速為您的精密驅(qū)動信號鏈增加價值
Q&amp;A | 關(guān)于高級硬件在環(huán)(HIL)您想要了解的十個問題

3分鐘帶您快速了解HIL測試及其架構(gòu)

精密DAC如何快速為您的精密驅(qū)動信號鏈增加價值
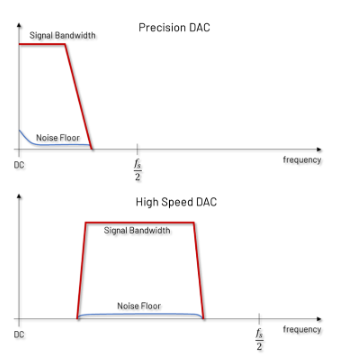
快速精密DAC與高速DAC:異同
詳解快速控制原型RCP與硬件在環(huán)仿真HIL

快速控制原型RCP與硬件在環(huán)仿真HIL該如何區(qū)分呢?

【干貨分享】硬件在環(huán)仿真(HiL)測試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論