 協作機器人 - 安全額定監控停止
協作機器人 - 安全額定監控停止
本博客的主題是機器人安全標準ISO 10218中的安全級監控停止。
安全等級的監控停止不需要斷開驅動器電源,但需要監控停止,即檢查運動。實際上,它是IEC 2-60204的1類停止和IEC 61800-5-2的SOS。
ISO TS 15066 為 ISO 10218:2011 提供了關于在協作應用中使用機器人的額外指導。本指南正在納入ISO 10218:202X。
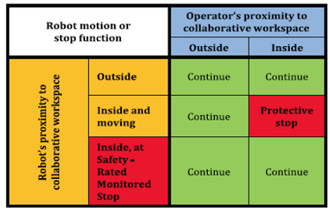
圖3 - ISO TS 15066中SSM的真值表
綜上所述,如果沒有人在場,機器人可以進入協作工作空間。當沒有人在場時,機器人可以操作,但一旦有人進入該區域,機器人就必須停止。在以后的博客中,我將介紹與安全級人體存在檢測相關的標準,包括IEC 61496和IEC 62998系列。
安全等級的監控停止協作應用程序使用保護停止,這與緊急停止不同。以下是各個站點的摘要。
正常停止 –顧名思義,每臺機器都應該有一個停止控制,停止優先于任何啟動。此控件的使用很頻繁,根據IEC 0-1,停止將是類別60204或1停止 <>。
保護性停止 –通常由激光掃描儀、3D TOF 相機或光幕啟動。為了降低風險,激活頻率不高。它的重置(即允許再次移動)可以是自動的。允許類別 0、1 或 2。
緊急停止 –這是由紅色和黃色大按鈕啟動的停止。它的啟動是手動的,它的重置是手動的,其目的僅用于緊急使用。僅允許類別 0 或 1 停止。有一個完整的標準,ISO 13850,專門用于緊急停止的設計。
ISO 10218-1:2011 5.3.8.1 強制要求必須具有緊急和保護性停止輸入。
在工業之外也有類似的問題,ISO 13842具有以下特點。
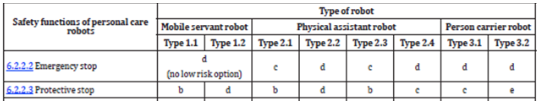
圖4 - 個人護理機器人停止功能的性能水平
一個有趣的問題是,停車是否真的會造成危險。例如,移動機器人(AGV,AMR,AIV,工業卡車......)停止阻塞消防出口,或者在外面工作時阻塞輪椅使用者的坡道,或者在人行橫道/人行橫道上停車,阻礙行人并最終阻礙交通。在任何現實生活中的危害分析和風險評估中,所有這些都需要考慮。
當機器人根本沒有施加動力時,運動呢?這可能是由于重力或有人物理移動機器人手臂。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17594瀏覽量
249521 -
驅動器
+關注
關注
52文章
8164瀏覽量
146033 -
機器人
+關注
關注
210文章
28212瀏覽量
206565
發布評論請先 登錄
相關推薦
如何保障桁架機器人的安全
協作機器人伺服和傳感器核心器件揭秘
“協作機器人”如何快速處理傳感器數據
基于Matlab的開源六自由度協作機器人實驗平臺
協作機器人的起源_為什么需要協作機器人
協作機器人是什么_協作機器人應用前景
什么是協作機器人?協作機器人如何選擇
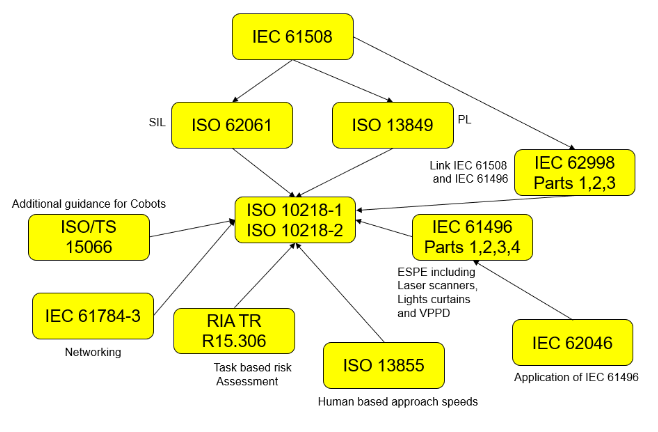
與工業機器人、協作機器人和移動機器人最相關的功能安全標準
與工業機器人、協作機器人和移動機器人最相關的功能安全標準





 工商網監
工商網監
評論