 人形機器人發展及產業鏈分析
人形機器人發展及產業鏈分析
一、為什么要發展人形機器人?
中國勞動力人口數量持續下滑,美、德、日等多國具有同樣趨勢。根據國家統計局發布的數據顯示,2022 年我國人口從年齡構成看,16~59 歲的勞動年齡人口8.76 億人,占全國人口的比重為 62.0%;60 歲及以上人口 2.8 億人,占全國人口的 19.8%,其中65 歲及以上人口2.1億人,占全國人口的 14.9%。勞動年齡人口在 2011 年前后已經達到峰值9.4 億人,之后開始負增長。十多年間,勞動年齡人口減少超過 6000 萬。世界銀行發布的數據顯示,美國的勞動年齡人口自2010 年開始就加速減少,日本、德國和英法意擁有同樣的人口結構變化趨勢。
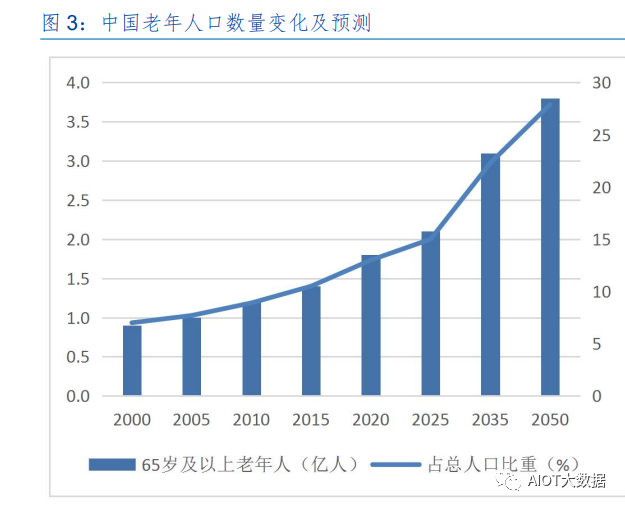
中國 65 歲以上人口比例持續增加,全球 2050 年 65 歲以上人口比例將達16%。根據《中國發展報告 2020:中國人口老齡化的發展趨勢和政策》預測,2025 年“十四五”規劃完成時,中國 65 歲及以上的老年人將超過 2.1 億,占總人口數的約15%;2035 年和2050年時,中國65 歲及以上的老年人將達到 3.1 億和接近 3.8 億,占總人口比例則分別達到22.3%和27.9%。聯合國數據顯示,2021 年全球 65 歲及以上人口為 7.61 億,到2050 年這一數字將增加到16億,80 歲及以上的人口增長速度更快。根據《世界人口展望 2022》的數據顯示,2022年65歲以上人口占總人口比例為 10%,到 2050 年將升至 16%。
中國制造業勞動力總量下降,且年輕勞動力占比快速下降。根據國家統計局數據,2015-2020年,制造企業平均用工人數由 8711 萬人下滑至 6550 萬人,遠高于同期營業收入3%水平的降幅。從年齡結構看,2015 年制造業勞動力 30 歲以下占比 28.2%,30-45 歲占比45.7%,45歲以上占比 26.2%,到了 2019 年,制造業勞動力 30 歲以下占比 21.4%,30-45 歲占比46.1%,45歲以上占比 32.4%,制造業勞動力年齡老化速度過快。 美國制造業人數下降,比例已降至歷史最低水平。根據中央財經大學國際金融研究中心客座研究員張啟迪《重新審視美國制造業的“衰落”》,自 1939 年以來美國制造業就業人數持續增長,至 1978 年達到頂峰(1933 萬人)。2022 年美國制造業就業人數為1298 萬人,占全部就業的比重僅為 8%,處于歷史最低水平。
人力成本持續上升,機器替代人是一大趨勢。根據中國政府網,從2022 年第三季度全國“最缺工”的 100 個職業排行看,其中有 39 個屬于生產制造及有關人員,有19 個屬于專業技術人員。從缺工崗位看,主要缺的是勞動密集型行業低技能一線員工和部分專業技術人員。“在勞動年齡人口下降、勞動力供給趨緊、人工成本上升的背景下,用機器替代流水線上的簡單重復勞動是一大趨勢。”中國人民大學中國就業研究所所長曾湘泉說。根據ReshoringInstitute報告,全球 13 個國家制造業基層員工薪資中,德、美、英人均年薪超過3 萬美元,中國在人力方面已不再是低成本國家。
中國是全球最大的機器人市場,21 年全球機器人增速創新高。根據國際機器人聯合會(IFR)發布的《2022 年全球機器人報告》,2021 年全球工廠新安裝51.7 萬臺機器人,同比增長31%,創下歷史新高。全球運行中的機器人存量約為 350 萬臺,亦創下了新的紀錄。作為全球第一大工業機器人市場,中國 2021 年安裝量增長 51%,新安裝 26.82 萬臺。運行存量突破100萬臺大關,增長 27%。

二、為什么要是“人形”?
原因一:“人形”是最適合人類社會所有場景的形態,無需改變場景來適應機器,一旦技術成熟可直接用于所有社會場景。根據中新網,在 2019 年的特斯拉AI Day,馬斯克曾表示,“TeslaBot可以執行一些危險、重復、枯燥的任務”。他希望今后人類不想干的事統統交給特斯拉機器人來干,并推測人們可能會發掘出連他都預料不到的用途。根據證券時報,2023 年特斯拉股東大會上馬斯克表示,“未來每個人都會擁有一個人形機器人,這個市場將會超過電動車的需求,可能是百億美元級別的。如果人形機器人和人的比例是 2 比 1 左右,那么人們對機器人的需求量可能是100億乃至200億個,會遠超電動車的數量。” 根據高工機器人網,馬斯克的思路是第一批機器人主要在B 端應用,服務于危險、無聊、重復的工作或人們不想做的工作;第二批大規模使用的機器人,讓機器人在現實世界中導航,無需指令也能做有用的事;第三批是預計不到 10 年后,人們可以在家里使用的機器人。
原因二:恐怖谷理論下,“人形”的好感度上限遠高于非人形,一旦產生移情效應將顛覆作為“物”的屬性,即便作為“工具人”性能欠缺也具備商業化價值。根據百度百科,“恐怖谷理論”是 1970 年被日本機器人專家森昌弘提出,森昌弘的假設指出:由于機器人與人類在外表、動作上相似,所以人類亦會對機器人產生正面的情感;而當機器人與人類的相似程度達到一個特定程度的時候,人類對他們的反應便會突然變得極其負面和反感,哪怕機器人與人類只有一點點的差別,都會顯得非常顯眼刺目,從而整個機器人有非常僵硬恐怖的感覺,猶如面對行尸走肉;當機器人和人類的相似度繼續上升,相當于普通人之間的相似度的時候,人類對他們的情感反應會再度回到正面,產生人類與人類之間的移情作用。
人形機器人具備滿足馬斯洛前四級需求的可能,移情效應下ToC 端“人形”將極大提高用戶粘性。根據維基百科,馬斯洛需求層次理論構建了人類需求的五級模型,從層次結構的底部向上,需求分別為:生理(食物和衣服),安全(工作保障),社交需要(友誼),尊重和自我實現。我們認為人形機器人至少具備滿足前四級需求的可能,這是非人形機器人所無法突破的。人類會借助一些物品來滿足各層級需求,而非物品本身滿足人類需求,但人形機器人具備本身滿足其需求的可能性。一旦與人形機器人產生了移情作用,率先進入 ToC 端的意義將不僅僅是產品力和品牌層面的先發優勢,還有其特定的“形象”,這將大大提高用戶粘性。
ChatGPT 成熟技術加持下,只“說”不“做”也可滿足交流、尊重等需求。根據AI 技術聚合網,ChatGPT 的原理是基于自回歸語言模型,它是一種基于深度學習的自然語言處理技術,可以用來生成自然語言文本。根據世界首位機器人公民、聯合國創新大使機器人索菲亞官方賬號,英國 Engineered Arts 公司人形機器人 Ameca 在安裝了 GPT-3 后,Ameca 變成了一個“專家”,能夠與人們聊天說地,也能快速對答各種提問。在接入 GPT-4 后,Ameca 獲得了通過表情來表達含義的能力,已具備語言、表情、動作等能力。
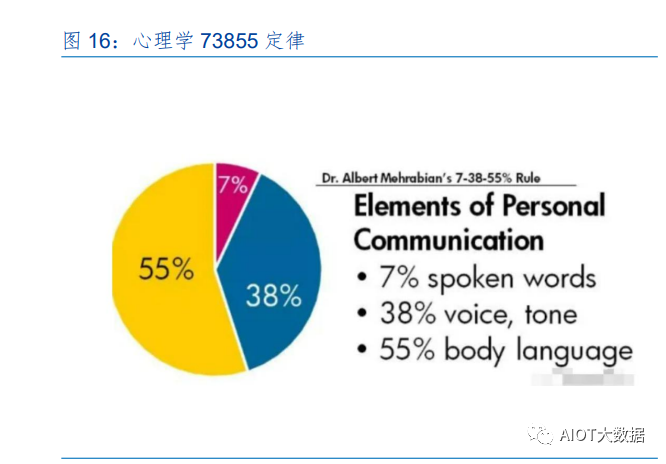
原因三:73855 定律下視覺傳達信息作用大,“人形”的肢體語言最符合人類認知。我們認為“人形”的肢體語言、神態語言最符合人類思維方式和認知,人類無需適應機器人,便能輕松理解機器人的動作。根據百度百科,美國心理學家 Mehrabian 研究發現,55%的信息通過視覺傳達的,如手勢、表情、外表、妝扮、肢體語言,38%的信息通過聽覺傳達,如說話的語調、聲音的抑揚頓挫等,而語言本身只能傳遞出 7%的信息,因此“人形”在實現人機交互中意義重大。例如英國Engineered Arts 公司的人形機器人 Ameca,僅通過看其表情和肢體動作,就能理解其“表達”的意思。
三、什么是具身智能?
英偉達創始人黃仁勛在 ITF World 2023 半導體大會上表示,AI 下一個浪潮將是“具身智能”,其描述的“具身智能”是指能夠理解、推理并與物理世界互動的智能系統,包括機器人技術、自動駕駛汽車,甚至是聊天機器人,它們會更聰明,因為它們能了解物理世界。根據上海交大教授盧策吾在機器之心 AI 科技年會上,發表了主題演講——《具身智能》,具身智能是智能科學的一個基礎問題,是指具有身體體驗的智能。從認知角度看,人類是第一人稱視角的智能,但給機器喂很多數據進行學習,屬于第三人稱的智能,比如給機器很多盒子,并且標注這就是盒子,然后機器就會知道這種模式是盒子,但機器并不是通過體驗知道這是盒子的。
根據《具身智能》,主動貓是具身智能,旁觀貓是旁觀智能。1963 年的一個實驗能一定程度展示兩者的區別,一只貓被綁起來,只能看這個世界,與其連接的另一只貓則可以主動去走。被動的貓是一種旁觀的智能,而主動的貓是具身的智能,實驗的最后,主動體驗的貓學會了正常行走,但旁觀的貓并沒能獲得行走能力。
具身智能涉及多學科,是系統性工程。上海交通大學盧策吾教授在機器之心AI 科技年會上發表主題演講《具身智能》提到 1950 年圖靈在他的論文《Computing Machinery andIntelligence》中首次提出了具身智能的概念,概念提出了幾十年了直到近幾年才比較熱門,原因是它涉及到眾多的學科,當時很多學科都不是很成熟。硬件、軟件還有各種觸覺傳感器也不夠成熟。而到了今天,各個學科都可以聚到一起來做這么一個宏大的系統。在這樣的情況下,我們才有可能推動這個方向進一步發展。
根據《具身智能》,具身智能包括 3 個模塊:具身感知、具身想象和具身執行,AI+機器人正是“具身智能”當前的落點。工業機器人主要根據控制系統發出的指令信號控制機器人主體完成任務,主要依賴于機器人的執行層。與工業機器人不同,具身智能機器人若能像人一樣與環境交互、感知、決策、完成任務,將不得不提升感知層和認知層的能力。盧策吾教授提出PIE方案,認為具身智能包括 3 個模塊:具身感知(Perception)、具身想象(Imagination)和具身執行(Execution),有望加速推動具身智能落地。目前看來,AI+機器人或許正是“具身智能”當前的落點。
四、什么是 Robot GPT?
ChatGPT 為人工智能提供了語言載體,人形機器人將提供物質載體,實現人工智能從“想到”“說到”到“做到”的跨越。根據鈦媒體,全球首家 5G 云端智能機器人運營商達闥機器人公司即將推出首個機器人制造領域的多模態認知大模型,名為 RobotGPT。其創始人、CEO黃曉慶表示,如果把谷歌 DeepMind 推出的“阿爾法狗”(AlphaGo)當作人工智能的原子彈的話,ChatGPT是AI領域的氫彈,作為“兩彈一星”的星,云端智能機器人則是人工智能時代的運載火箭,人工智能的載體,將成為第四次工業革命的最重要標志。
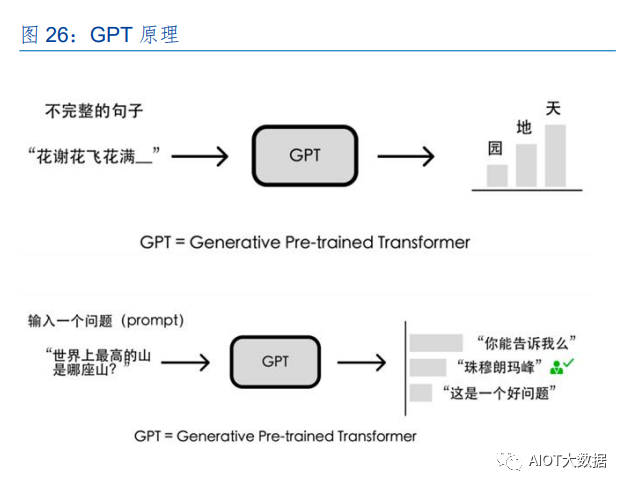
ChatGPT 本質是文字接龍,基于 ChatGPT 模型思路可構建RobotGPT框架。根據斯坦福大學 2023 年最新論文《RobotGPT: From ChatGPT to Robot Intelligence》,基于和ChatGPT類似的工作原理構建了 RobotGPT 的框架。根據 Open AI 官方對 ChatGPT 原理介紹,ChatGPT是在GPT (Generative Pre-training Transformer)模型的基礎上通過改進優化得到的。GPT是一種大型語言模型,能夠生成各種不同的文本類型。GPT 模型思路是讓AI 在通用的、海量的數據上學習文字接龍,即掌握基于前文內容生成后續文本的能力。然后人類引導接龍方向即有監督訓練初始模型,對特定問題告訴 AI 人類認可的答案。
Reward 模型進行強化學習,進一步優化 ChatGPT 的輸出質量。根據OpenAI 官方對ChatGPT 原理介紹,第二步訓練 Reward 模型,人的時間精力有限,但AI 的精力是無限的,研究人員讓 GPT 對特定問題給出多個答案,由人類來對這些答案的好壞做排序,基于這些評價數據,研究人員訓練了一個符合人類評價標準的 Reward 模型。第三步基于reward 模型使用PPO強化學習優化 GPT 模型,即 AI 基于評分去調整參數以便在下次問答中獲得更高分。
RobotGPT 的原理可理解為由 ChatGPT 的文字-文字接龍,變為了文字/語言/各類傳感器接收的信號-動作接龍。根據《RobotGPT: From ChatGPT to Robot Intelligence》,人的八大智能包括語言智能、數學邏輯智能、空間智能、人際智能、內省智能、音樂智能、身體運動智能、自然認知智能,機器人實現不同的智能需配備不同傳感器、自然語言處理能力和人工智能算法。在設計的RobotGPT 框架圖,思路類似于 ChatGPT,同樣是通過深度學習和強化學習構建端對端AI 大模型。
目前 ChatGPT 是單模態,RobotGPT 需要多模態模型。達闥機器人公司 CEO 黃曉慶表示,ChatGPT 的出現,恰恰證明機器人需要一個云端大腦。因為ChatGPT是不可能裝在一個小小的計算機里的,它必須裝在一個云里面,變成個云服務。ChatGPT目前本身是單模態的,所以它無法支持機器人。而基于多模態的人工智能大模型要能夠支持多模態,文字、語言、視覺、運動都要支持,這就是我們在做的 RobotGPT。
五、表情最像人的 Ameca 是怎么做到的?
Ameca 機器人具備互動、感知等功能,表情豐富度高。Ameca被Engineered Arts 描述為“世界上最先進的人形機器人”,于 2021 年12 月亮相,并于去年8月獲得了逼真的面部表情。Engineered Arts 使用了 ChatGPT-3 進行對話和翻譯,使用DeepL進行語言識別,并使用 Amazon Polly Neural voices 實現其說話功能。
Ameca 僅面部就有 45 個電機,底層技術是 Mesmer+ Tritium。Ameca重 49kg,臂展 1.8 米,高 1.87 米,身體共有 52 個模塊,支持 51 種關節運動。僅面部就有45個電機,其中眼睛就有 8 個電機對其進行控制,眉毛有 4 個電機,嘴巴則有2 個電機。這樣它就能完成相當復雜的面部表情。除此之外,它的眼睛和胸前都內置攝像機,可以通過人臉識別辨認出2米內的人類。它還能通過耳朵聆聽人的聲音,與人互動。做出逼真的表情的關鍵就是Ameca結合了AI與AB(Artificial Body)技術,而這底層系統是機器人操作系統 Tritium 和工程藝術系統Mesmer。
Mesmer 系統構建表情模型,Tritium 系統驅動硬件。Mesmer 是一個用于建造仿真人形機器人的系統,通過 36 個攝像機對人體進行 360 度的3D 掃描后,包括人類的骨骼結構、皮膚紋理和表情,為 Ameca 提供大量的真人表情數據,最終通過立體光刻3D打印機制作精確模具。Tritium 機器人操作系統被稱為“為金屬注入生命的魔法”,該系統可以從硬件平臺運行硬件組件,因此 Ameca 的手臂、軀干和頭才能運動自如,也是實現表情管理的基礎,因為它連接了軟件,硬件和云端,可以驅動硬件的每一個組成部分。
六、人形機器人商業化前景幾何?
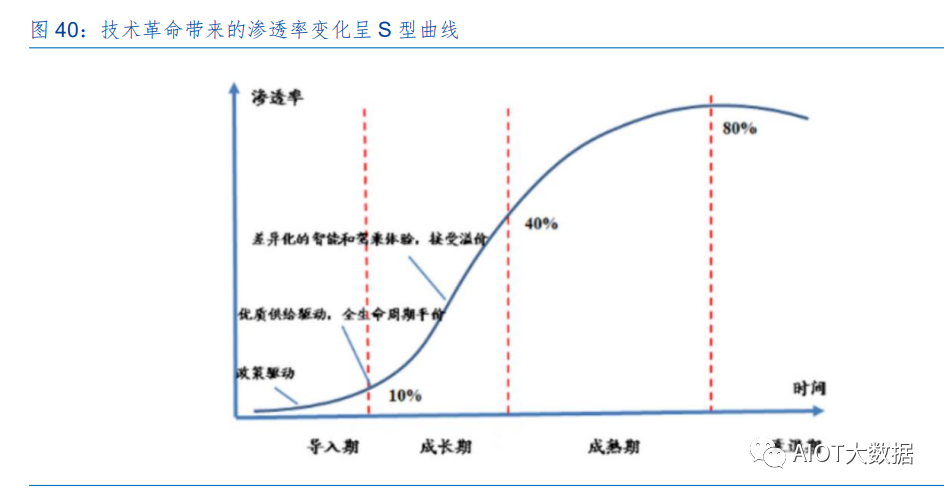
具有極強通用性的人形機器人將是機器人界的 iPhone,滲透率達到10%將進入加速期。根據南方科技大學機械與能源工程系教授、鵬城學者特聘教授張巍2022 年接受真故研究室采訪時表示,整個機器人發展的趨勢,本質上是從專機到逐漸通用的過程。只是傳信息的話iPhone的性價比遠不如 BB 機,但當其可以支持多項功能之后,就會快速重塑整個行業。當人形機器人能完成多項任務后,他的商業拐點會出現,最關鍵的是以后無論加多少 App 它的基本形態都不用變。美國著名分析師 Harry S. Dent, Jr 認為一項新技術或者一個新興產業,滲透率達到10%之前被稱之為導入期,發展緩慢;超過 10%的閾值后,將步入高速成長期。
類比自動駕駛,通用機器人不需要完全通用才有商業價值,商業化可能未來兩三年實現。根據張巍教授采訪中表示,通用只是一個終極產品形態,只要不斷地在上面加功能。第一個功能不夠,它的性價比比不過專機,那就加第二個功能,逐漸地就比兩個專機要劃算。人形機器人產業化和商業化并不需要足式機器人在實現超能之后才能開始,這個節點可能在未來兩三年就可以實現。類比自動駕駛,現在也還沒有真正地落地,但是自動駕駛的研究和商業探索已經延展了很多,甚至開始顛覆整個汽車行業。手機是個人通訊娛樂的通用終端,智能汽車是未來人們在結構化道路上的通用終端,人形機器人將會是面向各類非結構化場景時連接數字世界與物理世界的通用終端。
美國最低時薪 7.25 美元,特斯拉機器人 2 萬美元價格可接受度高。根據美國聯邦法律的規定,目前美國境內的最低時薪為每小時 7.25 美元。2021 年美國眾議院通過了《提高工資法案》將設定時薪 15 美元的最低標準,自 2021 年 1 月一直在國會等待審議。按最低的7.25 美元計算,特斯拉機器人只要實現替代最基礎的崗位,每天工作8 小時,按法定工作日一年工作 260 天,相當于雇主節省了 1.5 萬美元人力成本。根據華爾街見聞,2022 年特斯拉AI DAY馬斯克表示,預計 Optimus 量產后價格在 2 萬美元以內,若按 2 萬美元計算,Optimus 僅使用1.3年便可覆蓋成本。
麥肯錫指出到 2030 年保守估計 4 億人將被機器人取代。麥肯錫2017 年發布的《失業與就業:自動化時代的勞動力轉型》報告指出,全球最高達 50%的工作是可以被機器人取代的;有六成的工作崗位,其 30%的工作量可以由機器代勞。稱到 2030 年,全球將有多達8 億人的工作崗位可能被自動化的機器人取代,即使機器人的崛起速度不那么快,保守估計仍有4 億人工作被替代。根據高工機器人網,弗若斯特沙利文預測,到 2026 年全球人形機器人市場規模將達到80億美元;高盛預計到 2035 年,在藍海市場情景下,人形機器人市場能夠達到1540 億美元的規模。
工業、商業、家用三大場景,人形機器人將率先在工業和商業實現規模化應用。我們認為工廠物料裝配相對結構化,在封閉環境下且任務單一。商用領域可實現體驗增強、數據收集以及流量轉化等功能。而家用場景對人機交互需求和價格敏感性都相對更高。2018年國內優必選的 2150 臺克魯澤(Cruzr)機器人在居然之家上崗。顧客可以詢問有關店鋪的所有問題,如品牌介紹、最新產品、促銷優惠、會員權益等。根據億歐智庫,優必選副總裁胡佳文對億歐表示,“克魯澤記得你的偏好,習慣,每一次來消費的情景等。”體驗增強、數據收集以及流量轉化三類,商業場景中的服務機器人恰好是能將這三種功能同時實現的載體。
“一老一小”市場將成剛需,機器人替換萬億家政市場場景明確。根據艾媒咨詢數據顯示,2021 年中國出生人口數量為 1062 萬人,65 歲及以上人口數量超過兩億,“一老一小”成為家政服務的主要對象。2015 年至 2020 年中國家政服務業市場規模逐年穩步增長,2020年達到8782億元,同比增長約 26.0%。而 2021 年該數據已增至 1.0149 萬億元。國內人形機器人公司優必選健康事業部高級技術總監張呈昆在接受界面新聞專訪時表示,公司目前主攻的兩大業務板塊是“一老一小”。“一老”指的是針對老年人的智慧康養行業,“一小”則主要指人工智能教育,研發了涵蓋學前、小學、初中、高中、高職校的貫通式人工智能教育解決方案。
中國發展人形機器人具備成本、場景和產業鏈三大優勢。根據南方科技大學機械與能源工程系教授、鵬城學者特聘教授張巍 2022 年接受真故研究室采訪,我們認為中國人形機器人具備三大優勢,第一是成本優勢,由于成熟產業鏈與相對低的人工成本,足式機器人硬件成本上國內有巨大的優勢。第二是場景優勢,機器人發展的整個產業鏈以及落地場景都能在中國找到。無論是ToC還是 ToB 的場景,國內的豐富度都是國外的幾十上百倍。第三是產業鏈優勢,“中國擁有世界上規模最大、門類最全、配套最完備的產業鏈體系,機器人產業已基本形成了從零部件到整機再到集成應用的全產業鏈體系,這種優勢不僅沒有國家能夠替代,還會伴隨著產業更替日益完善。”優必選科技首席技術官熊友軍表示。
七、人形機器人量產還有多遠?
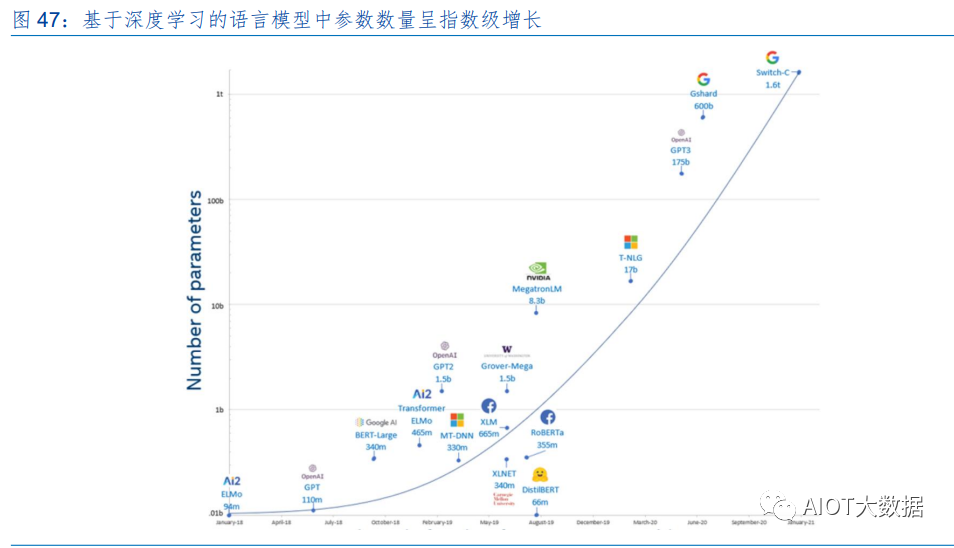
摩爾定律將線性增長變為指數級,2022 年已達到“棋盤的后一半”。根據科學網,在過去大多數時間里,科技和產品進步是線性的,而第四次工業革命呈現出指數級而非線性的發展速度。人類長期習慣于線性的思維方式,而難以適應“指數級”思維模式。21 年12 月中國科學技術大學教授、長三角科技戰略前沿研究中心主任陳曉劍表示,真正讓人類第一次認識到科技是可以呈指數發展的是摩爾定律,它指出計算能力每兩年將增加一倍。古印度舍罕王故事中“棋盤的后一半”就是摩爾定律的比喻,指的是越到后面指數增長速度越快。如果從1958 年半導體的發明開始計算,那么 2022 年我們處在第 32 個格子上——正好到達“棋盤的后一半”,創新的加速和變革的規模將迎來新的拐點和引爆點,正是驚喜出現的好時機。22 年 11 月發布的Chat GPT,開啟了人工智能時代的起點。
當前人形機器人處于技術成熟度曲線第一階段,但進步速度將是指數級的。根據百度百科,技術成熟度曲線誕生于硅谷,又叫技術循環曲線、炒作周期,是指新技術、新概念在媒體上曝光度隨時間的變化曲線。美國 Gartner 公司將其分為 5 個階段:科技誕生的促動期、過高期望的峰值、泡沫化的底谷期、穩步爬升的光明期、實質生產的高峰期。
萊特定律下“具身”的制造成本能夠迅速下降。根據維科網,萊特定律是制造業的規模效應的體現,意思是產量每擴大一倍,成本就會降低 15%左右。美國的福特T 型車從1909年到1923年的產量和價格變化曲線就完美詮釋了萊特定律。產量從一到十的過程中,生產成本會有三次15%左右的降低,最終生產成本會降到原來的 60%左右。再加上零配件成本,也會因產量提升而降低,產業集群還可以進一步降低成本。
國外多家科技公司下注人形機器人賽道,根據中國國家郵政局官網,亞馬遜投資物流機器人公司 Agility Robotics,機器人預計 24 年開始交付,25 年全面上市。22 年4 月物流倉儲機器人制造商 Agility Robotics 完成 1.5 億美元的 B 輪融資,由 DCVC 和“安卓之父”Andy Rubin創建的Playground Global 領投,亞馬遜產業創新基金參投。DCVC 聯合管理合伙人Matt Ocko表示,勞動力短缺會導致供應鏈遭到破壞,Agility 解決的是企業勞動力短缺的問題,將人們從重復或不愉快的工作中解放出來。Agility Robotics 研發的機器人 Digit 專門用于在倉庫和配送中心執行任務。根據維科網,Agility 計劃在 2024 年初向其合作伙伴提供首先雙足運送機器人解決方案,并然后在次年全面上市。
OpenAI 領投 1X Technologies 公司,機器人已實現拿捏物品、輕松開門、自主導航和避障等功能。根據華爾街見聞,當地時間 3 月 23 日,挪威人形機器人公司1X Technologies(前稱為Halodi Robotics)宣布在 OpenAI 領投,老虎環球和挪威投資者財團跟投的A2 輪融資中籌集了2350萬美元,1X 計劃用這筆資金來加大力度研發雙足機器人模型 NEO,以及在挪威和北美量產其首款商用機器人 EVE。根據澎湃科技,1X 近期 Technologies 發布了一段視頻,NEO機器人能夠伸出手指拿捏物品、輕松開門、自主導航和避障等。與其他需要減速才能正常運行的機器人不同,1XTechnologies 的機器人可以以 1 倍速度運行,即與人類的速度相當。
AI 人形機器人初創公司完成 A 輪融資,正在推出“世界上第一個商業上可行的通用人形機器人”。AI 人形機器人初創公司 Figure 在5 月25 日宣布完成了7000萬美金的 A 輪融資,此前,Figure 稱正在推出“世界上第一個商業上可行的通用人形機器人”,名為“Figure01”。目前 Figure 正在設計一個完全機電化的人形機器人,擁有雙手。按照其模型規劃,最終的機器人將是全電動的,高 1.6 米,重 60 公斤,有效載荷為 20 公斤,充電后可運行5小時。
英偉達發布專為機器人開發打造的平臺 Isaac,大幅降低機器人開發難度。近日英偉達發布了專為機器人開發打造的平臺 Isaac,平臺包括軟件、硬件、一個虛擬世界的機器人模擬器。工業和商用機器人的開發過程相當復雜,時間長,挑戰大,成本高。在許多用例和場景中,缺乏結構化的環境也很普遍。NVIDIA Isaac 機器人開發平臺采用端到端解決方案,可幫助降低成本、簡化開發流程并加速產品上市。
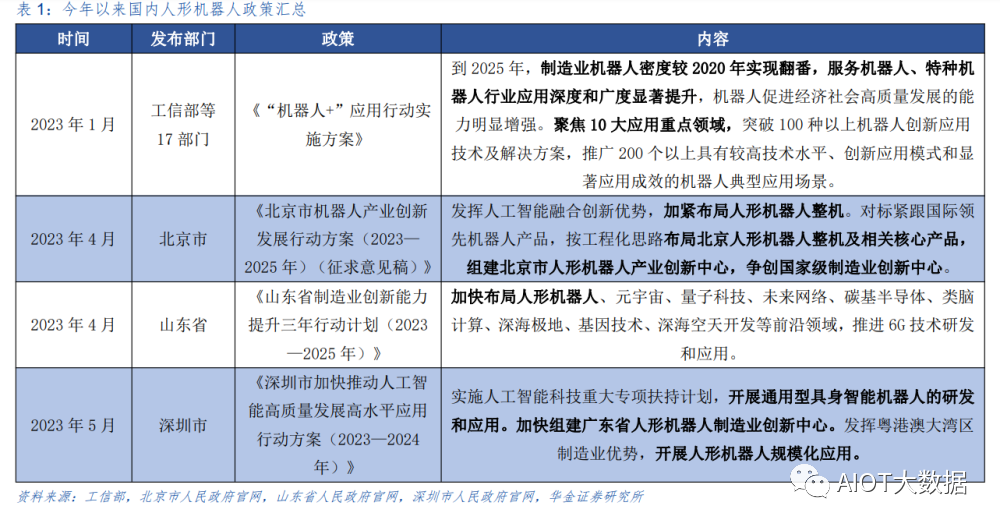
今年以來,國內密集發布人形機器人相關政策。2023 年1 月,工信部等17部門聯合印發《“機器人+”應用行動實施方案》,提出到 2025 年,制造業機器人密度較2020 年實現翻番,服務機器人、特種機器人行業應用深度和廣度顯著提升。根據北京、山東、深圳人民政府官網,4月20日,北京市提出加緊布局人形機器人整機,對標緊跟國際領先機器人產品,按工程化思路布局北京人形機器人整機及相關核心產品。4 月 29 日,山東省提出加快布局人形機器人等多項前沿領域。5月 31 日,深圳市提出開展通用型具身智能機器人的研發和應用,加快組建廣東省人形機器人制造業創新中心,發揮粵港澳大灣區制造業優勢,開展人形機器人規模化應用。
八、為什么特斯拉 Optimus 有望率先量產?
(一)特斯拉 Optimus 具備哪些優勢?
我們總結了特斯拉人形機器人主要具備以下幾個優勢:1)外形:根據特斯拉22年AI DAY展示,首先從外形上擎天柱身高 173cm,體重 73kg,符合“人形”。2)價格:根據華爾街見聞,2022年特斯拉 AI DAY 馬斯克表示,預計 Optimus 量產后價格在 2 萬美元以內。我們認為如果在部分環節完全替代人工,這個價格對于工業和商業場景具備吸引力。3)商業定位準確:特斯拉的擎天柱從最初的定位就符合 PMF(Product / Market Fit)理論,這在成本端和設計理念已經體現。4)生態:特斯拉生態下,沖壓機、FSD 自動駕駛系統、Dojo 計算機、D1 芯片,為機器人提供了有利條件。5)已有水平和發展速度:已具備的能力和發展速度優勢,從 21 年概念圖到23 年5 月能夠完成復雜任務的完整機器人,僅一年半便完成了迭代。 相比之下,以當前運動性能最優的波士頓動力 Atlas 機器人為例,Atlas 售價大約在 200 萬美元,如此高昂的價格,注定無法在 C 端大面積鋪開,而B端用戶對于成本與價格的考量往往比 C 端用戶更加理性且嚴格。波士頓動力公司在Atlas 的整個開發過程中一直明確表示,其人形機器人純粹用于研發目的。
我們認為,從特斯拉人工智能生態的角度來看待,汽車、機器人和自動駕駛、DOJO超級計算機可以形成閉環,DOJO 和自動駕駛系統充當“大腦”,汽車和機器人則在物理空間中拓展認知,再反過來訓練“大腦”。 根據我們總結,特斯拉生態具備:1)特斯拉制造汽車時引進了全球最大的壓鑄機,人形機器人有上千個零部件,未來也可能通過一體化的方式加快生產制造。2)純視覺方案,可直接嫁接FSD 系統。Optimus 采用了跟特斯拉電動車相同的感知與計算單元,其中包括自研的芯片,以及三個自動輔助駕駛攝像頭。3)Dojo 計算機訓練 AI 模型。dojo 是特斯拉開發的一臺超級強大的訓練計算機,目標是接收大量圖像和視頻數據,并在無人監督的情況下自行學習。4)D1是特斯拉自主研發的 AI 訓練芯片,相比于業內其他芯片,同成本下性能提升4 倍,同能耗下性能提高 1.3 倍,占用空間節省 5 倍。目前 dojo 已用上自研 D1 芯片。5)商業模式上可直接延續電動車的“硬+軟”收費模式。
21 年概念機到 22 年原型機再到 23 年 5 月完整機,Optimus 已經可以“自己造自己”了。根據特斯拉 2022 年 AI DAY 和 2023 年股東大會直播顯示,22 年10 月Optimus 首次亮相無法自主行走需要人攙扶,23 年股東大會展示視頻中 Optimus 已經可以在車間靈活行走、抓取物體,已經擁有環境探索與記憶、電機轉矩控制能力、基于人類跟蹤運動的 AI 訓練以及物體操縱能力,且已打通了 FSD 底層模塊,實現了一定程度的算法復用。2022 年馬斯克接受采訪時說道,機器人“擎天柱”預計明年底開始交付,目標量是 23 年 10 萬臺、24 年50 萬臺、25年100萬臺。2023 年 3 月馬斯克表示,特斯拉機器人已經可以“自己造自己”了。
最新展示中 Optimus 電機可精準控制不打破雞蛋,已經可以完成物品分揀的復雜工作。根據特斯拉最新在 23 年股東大會上發布的視頻顯示,Optimus 完成了一系列復雜任務如電機扭矩控制,力度控制更精確、環境探測與記憶等。例如特斯拉展示了 Optimus 電機轉矩控制的能力,能做到精準控制力道不打碎雞蛋。此外,Optimus 也展示了其基于端到端AI 學習人類行為的過程,對物體進行分類擺放等,還展示了其從一個容器中拾取物體并將它放入第二個容器中。
(二)特斯拉 Optimus 硬件拆解
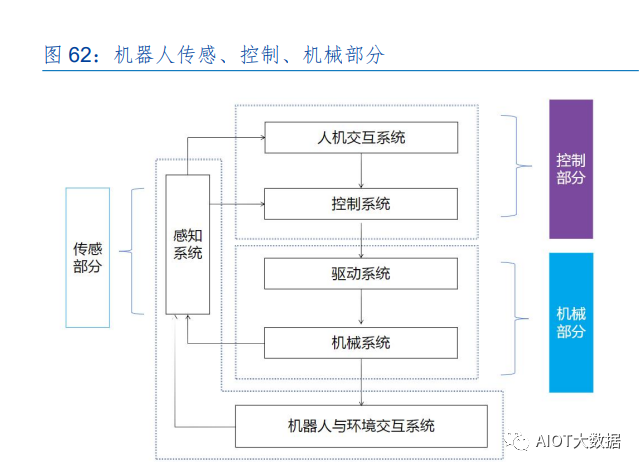
機器人四大核心組件:傳感系統、控制系統、執行系統、驅動系統。根據優必選研究院,機器人主要由機械部分、控制部分和傳感部分組成,其中機械部分是其它部分的重要基礎。機械部分按系統分包括驅動系統和機械系統。人形機器人有 4 大核心組件,分別是傳感系統(對應五官)、控制系統(對應大腦)、執行機構(對應四肢)和驅動系統(對應關節組織)。
根據 2023 年特斯拉股東大會直播顯示,Optimus 視覺方面采用攝像頭純視覺方案,能量方面采用 2.3KWh 電池,可待機 20 小時,支持工作全天。特斯拉最新亮相的機器人身高173cm左右,體重 73kg,采用了三個攝像頭,兩個常規的攝像頭分布在左右耳朵的位置,一個魚眼相機分布在最前方,延續了電動車的純視覺方案。大腦采用 Tesla SoC 可以進行視覺信息處理,動作決策、以及語音交流。電池部分采用了一塊 2.3 kWh 的電池,電池包內帶有充放電及電源管理芯片,可持續待機 20 小時,能支持機器人工作一整天。
特斯拉對機器人做了損害控制,保證位于胸腔的電池在機器人跌倒是不會爆炸。還對全身的結構件都做了相應的受力分析,出于成本考慮,為了適應量產沒有選用重量輕、性能好的碳纖維復合材料,而是采用鋁合金。特斯拉在汽車上有成熟的高壓鑄造鋁合金的經驗,在材料端對于機器人將來量產有較大幫助。
整機構型是大型仿人機器人機械部分的關鍵點之一,它與關節的數量及布置方式緊密相關。根據優必選研究院,人體有 206 塊骨頭,大的關節有 78 個,有六種類型關節。一般大型仿人機器人關節有 15-70 個,關節類型有三種,旋轉(水平方向旋轉)、偏移(垂直方向上下移動)、滑動(水平方向線性移動)。
特斯拉機器人軀干共有 28 個關節,旋轉關節和直線關節各14 個,每個關節對應一個執行器,手部共 12 個執行器。根據 2023 年特斯拉股東大會直播顯示,我們對28 個執行器位置和數量進行預計,28 個執行器分別為肩關節(單側三自由度旋轉關節)6 個,肘關節(單側直線關節)2個,腕部關節(單側 2 個直線+1 個旋轉)6 個,腰部(二自由度旋轉關節)2 個,髖關節(單側1個直線+2 個旋轉)6 個,膝蓋(單側 1 直線關節)2 個,踝部(單側二自由度直線關節)4個。每個旋轉關節用到一個諧波減速器,手部單手有 6 個執行器,11 個自由度,拇指方面由兩個電機驅動,驅動拇指的空心杯電機均橫置在手掌內,其他手指各一個。能拿起約9 公斤重物體,可以使用工具,實現精準抓取小部件。
通過仿真模擬,考慮成本和重量兩個因素,選出每個關節執行器最優解。根據2023年特斯拉股東大會直播顯示,在設計關節驅動器時,最重要的事情就是確定驅動器的工作范圍。首先對于機器人的工況做了假設,針對這些工況進行了仿真,在仿真中模擬出了機器人在各種情景下關節的輸出力矩。之后將輸出力矩投影到了關節驅動器的效率圖中,采用的是市面上可以買的標準品電機+減速機,之后根據不同的電機和不同減速比減速器組合,最終組合出十幾萬種結果,紅色的曲線就是系統成本和重量的最優曲線,再選出最合適的電機與減速比方案。之后將全身所有關節都做這樣的分析,可以得到全身關節的最優組合。
從局部最優進一步到整體最優,28 個軀干關節最終選出6 款執行器。為了降低生產成本,對執行器數量進行了精簡,即從局部的成本與重量最優,到全身的成本與重量最優。最終特斯拉選擇出了三款旋轉關節,三款直線關節,旋轉關節的扭矩為 20、110、180Nm,直線關節的推力為500、3900、8000N。
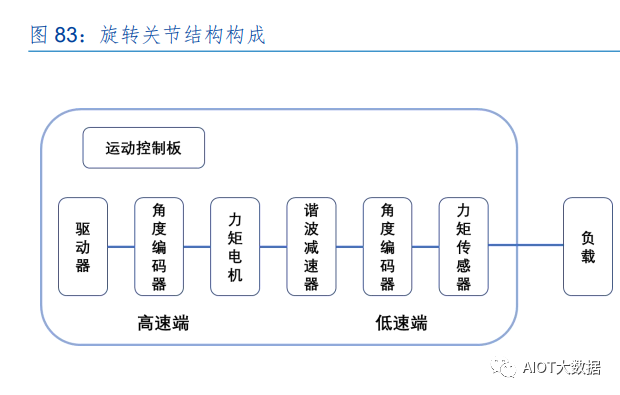
在高速端,旋轉關節采用內轉子電機+角接觸軸承,并配有一個剎車裝置,直線關節部分采用了內轉子電機和普通的球軸承。在低速端,旋轉關節采用了諧波減速機,并配有交叉滾子軸承,直線關節部分采用了行星滾柱絲桿,相比于傳統的滾珠絲桿,可以承受更大的負載。在傳感器方面,關節在高速端和低速端都配備了位置傳感器以及力和力矩傳感器。
伺服電機、減速機、控制系統、驅動器與機器視覺等重要零部件占據人形機器人成本超過 70%。根據高工機器人網,人形機器人整體的自由度/關節數量通常為20個至 50 個,一個自由度對應一臺伺服電機,國外電機價格通常為5000 至6000 元,甚至上萬元,國產電機價格也在 2000 元以上。
根據優必選研究院,伺服驅動器工作原理:要實現機器人的精準運動,每個關節需要能產生精確的輸出位置和力矩。每個舵機在接收到位置指令后,可以實時響應命令,多個舵機協調運行,就可以產生猶如人類一般靈活的運動。大型伺服驅動器有三種類型,分別為常規伺服驅動器、SEA伺服驅動器、本體伺服驅動器。常規伺服驅動器主要由力矩電機、諧波減速器、電機編碼器、輸出編碼器、驅動板、制動器組成。
以特斯拉關節結構來看,旋轉關節和直線關節結構類似,我們總結主要區別有三點:1)減速裝置:旋轉關節用的是諧波減速器,直線關節為滾柱絲杠。2)低速端傳感器:旋轉關節用的是角度編碼器,直線關節是位置編碼器。3)力傳感器:旋轉關節輸出端由于是旋轉運動,用的是力矩傳感器,直線關節輸出端是直線運動,用的是力傳感器。
根據對人形機器人研究,我們認為在關節構成中,價值量最高、技術壁壘最高的兩個環節是諧波減速器和無框力矩電機。 諧波減速器具備高精度、輕量化、小型化等優勢,人形機器人通常采用諧波減速器。根據優必選研究院,減速器是一種動力傳達機構,主要起著降低電機轉速、提升扭矩的作用。仿人機器人常用減速器有精密行星減速器、諧波減速器、擺線減速器三種,回差是仿人機器人用精密減速器的關鍵性能指標之一,一般來說回差越小精度越高,諧波減速器滿足高精度、小型化、輕量化、大減速比等特性,人形機器人一般采用諧波減速器。
機器人關節電機核心指標是功率密度,無框力矩電機由于體積小、重量輕,可滿足高功率密度要求。根據《一種無框力矩電機的制作方法》,無框力矩電機沒有外殼,可以提供更大的設備空間,中間是中空形式的,便于走線。在設計中,可以使整個機器體積更小,因此可以提供更大的功率密度比,同尺寸下可以提供更大的扭矩,可人形機器人輕量化和小型化的要求。功率密度=輸出功率/質量,對于人形機器人關節來說,由于空間有限,功率密度是非常核心的指標,因此無框力矩電機優勢明顯。
機器人運動時膝關節受力最大,Optimus 使用了仿生四連桿結構,可平滑電機輸出力保持效率最高區間。根據 2023 年特斯拉股東大會直播顯示,特斯拉對于機器人的各種動作進行了模態分析并將其降入到控制系統中去來降低控制頻率節省算力以及能源。膝蓋是機器人運動時受力最大的關節,為了降低電機輸出的力,膝蓋處創新使用了仿生四連桿結構,這種結構相比于二連桿可平滑電機輸出力,可以讓電機的出力維持在一個恒定值上來讓電機在效率最高的區間工作。
機器人產業鏈
(報告出品方/作者:國泰君安證券,肖群稀、鮑雁辛)
機器人運動控制的關鍵硬件——執行器
執行器——機器人的關節
機器人通常由執行機構、驅動系統、控制系統、和傳感系統四部分組成。機器人執 行機構是機器人賴以完成工作任務的實體,通常由一系列連桿、關節或其他形式的 運動副組成。工業機器人按臂部的運動形式分為四種:直角坐標型的臂部可沿三個 直角坐標移動;圓柱坐標型的臂部可作升降、回轉和伸縮動作;球坐標型的臂部能 回轉、俯仰和伸縮;關節型的臂部有多個轉動關節。這些運動都需要執行器來完成。
執行器可以根據運動分為兩類:旋轉執行器和線性執行器。 1)旋轉執行器會將某物旋轉一定的角度,可以是有限的也可以是無限的。旋轉執行 器的一個典型例子是電動機,它是一種將電信號轉換成其軸的旋轉運動的執行器, 當電流施加到基本電機時,電機旋轉。將電機直接連接到負載上,創建了一個直接 驅動的旋轉執行器,許多旋轉執行器與用作機械杠桿的機構相結合(優點)以降低旋 轉速度并增加扭矩,如果最終結果是旋轉,該組件的輸出仍然是旋轉執行器。 2)旋轉執行器還連接到將旋轉運動轉換成來回運動的機構,該機構被稱為線性執行 器。線性執行器本質上是沿著直線移動物體,通常是來回移動。這些機構包括:滾 珠/滾柱絲杠、皮帶和滑輪、齒條和小齒輪。滾珠絲杠和滾柱絲杠通常用于將旋轉運 動轉換成精確的直線運動,例如在加工中心。齒條和小齒輪通常增加扭矩并降低旋 轉運動的速度,它們也可以與將旋轉運動轉化為線性運動的機構結合使用。
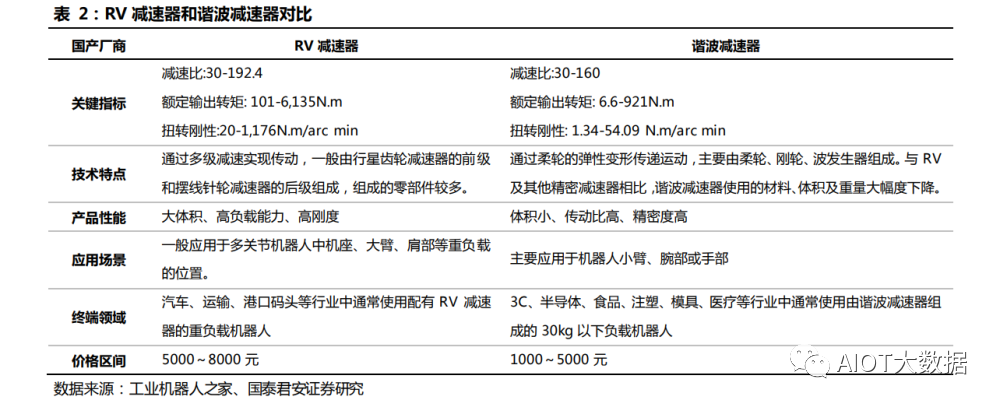
旋轉執行器主要包括 RV 減速器和諧波減速器: 1)RV 減速器:RV 通常是用擺線針輪,用于轉矩大的機器人關節,主要用于 20 公 斤到幾百公斤負載的機器人,一二三軸都是用 RV。RV 長時間使用后的精度保持度 高于諧波。由于 RV 的零部件更為復雜,承載強度更高且制造難度比諧波大,因此 產線的資本開支更高; 2)諧波減速器:諧波過去式以漸開線齒形為主,現在有部分廠家使用了雙圓弧齒形。諧波可負載的轉矩小,通常用于 20 公斤以下的機械臂。諧波里的一種關鍵齒輪是柔 性的,它需要反復的高速變形,所以它比較脆弱,承載力和壽命弱于 RV。
絲杠是將旋轉運動變成直線運動的傳動副零件。根據摩擦特性可分為滑動絲杠、滾 動絲杠及靜壓絲杠,其中滾動絲杠根據載荷傳遞元件的區別,分為滾珠絲杠和行星 滾柱絲杠: 1)滾珠絲杠:是傳動機械中應用最為普遍、精度最高的傳動裝置。具有摩擦阻力小、 傳動效率高、定位精度高、剛性高、微進給、高速進給、無側隙、使用壽命長等特 性。 2)滾柱絲杠:相比滾珠絲杠,滾柱絲杠具備高負載、高剛度和長壽命的優勢。行星 滾柱絲杠成本高,集中在高端或特殊需求,應用規模不大,主要是對液壓執行器的 替代。 3)梯形絲杠:和滾珠絲杠的運動原理相同,不同之處在于,梯形絲杠里沒有滾珠, 螺母和絲杠軸之間的運動完全靠機械接觸產生滑動,是滑動摩擦,所以梯形絲杠也 叫滑動絲杠。滾珠絲杠是滾動摩擦,梯形絲杠是滑動摩擦,滾動摩擦的摩擦系數遠 遠低于滑動摩擦系數,大多數滾珠絲杠的傳動效率高達 90%,有的達到 95%以上, 大多數梯形絲杠的傳動效率低于 70%。
執行器決定機器人的負荷和工作精度
機器人的技術參數反映了機器人可勝任的工作、具有的最高操作性能等情況。主要 包括:自由度、額定負載、工作空間、工作精度。其他參數還有:工作速度、控制 方式、驅動方式、安裝方式、動力源容量、本體質量、環境參數等。
1)自由度:工業機器人的自由度是根據其用途設計的。機器人的自由度反映機器人 動作的靈活性,自由度越多,機器人就越能接近人手的動作機能,通用性越好,可 用直線移動、擺動或者旋轉動作的數目來表示。自由度越多,結構越復雜,對機器 人的整體要求越高。工業機器人把機械臂上每一個關節都當作一個獨立的伺服機構, 即每個軸對應一個伺服器,每個伺服器通過總線控制,由控制器統一控制協調工作。
2)額定負載:也稱有效負荷,是指正常作業條件下,工業機器人在規定性能范圍內, 手腕末端所能承受的最大載荷。工業機器人負載范圍較大,一般為 0.5~2300kg。 當負載較大時,提高電機的功率不劃算,可以在適宜的速度范圍內,通過減速器來 提高輸出扭矩。伺服電機在低頻轉速下容易出現發熱和低頻振動,對于長時間工作 的工業機器人不利于確保其精確可靠的運行。精密減速器使伺服電機在合適的速度 下運轉,并精確地將轉速降到工業機器人各部位需要的速度,提高機械剛性的同時, 輸出更大的力矩。
3)工作精度:重復定位精度取決于機器人關節減速機及傳動裝置的精度,絕對精度 取決于機器人控制算法、編碼器精度、減速及傳動裝置精度等的綜合表現。一般來 說,機器人的重復精度高于絕對精度。要提高機器人的絕對精度,需要進行高精度 標定。標定可以分為三級:一級未驅動器與關節傳感器的標定,即確定關節位移傳 感器產生的信號與實際關節位移之間的關系;二級在一級基礎上,加入機器人幾何 參數的標定,針對各組成連桿的運動變量誤差和各連桿結構參數誤差引起的位姿誤 差;三級為非幾何標定,針對由關節柔度、摩擦、間隙以及連桿柔度等因素引起的 誤差。在標定過程中,測量是進行參數辨識和補償之前的重要環節,包括關節位移 測量和機器位姿測量。位姿測量方法又包括接觸式和非接觸式,其中接觸式測量對 機器人位姿限制較大;非接觸式測量中,三坐標測量機只能測量小型機器人,而激 光跟蹤儀對環境影響較為敏感,同時操作復雜,測量時間長。
4)工作空間:又稱工作范圍、工作行程,是指工業機器人作業時,手腕參考中心(即 手腕旋轉中心)所能到達的空間區域,不包括手部本身所能達到的區域,常用圖形 表示,P 點為手腕參考中心。工作空間的形狀和大小反映了機器人工作能力的大小, 它不僅與機器人各連桿的尺寸有關,還與機器人的總體結構有關,工業機器人在作 業時可能會因存在手部不能到達的作業死區而不能完成規定任務。由于末端執行器 的形狀和尺寸是多種多樣的,為真實反映機器人的特征參數,工作范圍一般是指不 安裝末端執行器時,可以達到的區域。
綜上,執行器是機器人的關鍵零部件,對機器人的負荷和精度有重大影響。減速器 是一種減速傳動裝置,可以通過降低轉速而提高扭矩,以傳遞較大的負荷,克服伺 服電機輸出的扭矩較小的缺陷。
Tesla Optimus 關節執行器:結構緊湊、高負載、低能耗
從特斯拉的發布會來看,我們預計特斯拉 Optimus 身體關節共有 28 個,包括三種 旋轉執行器(14 個)和三種線性執行器(14 個)。
特斯拉 Optimus 旋轉執行器方案猜測:永磁無刷電機+諧波減速器+抱閘+雙編碼 器+力矩傳感器+軸承。 采用諧波傳感器的優點:小體積,大速比,可達 160:1,扭矩密度比較高。軸向尺 寸小,執行器關節軸向可以比較緊湊。在機器人行業,大多數關節都沒有集成扭矩 傳感器,這是從成本,集成難度,剛度損失等方面考慮的。集成扭矩傳感器的優勢 在于關節更加安全,力控算法更簡單。
特斯拉 Optimus 直線執行器方案猜測:永磁無刷電機+行星滾柱絲杠+位置編碼器 +力傳感器+軸承。 采用線性執行器驅動器關節的優勢:1)空間利用率高。相比傳統旋轉執行器分布于 關節附近,線性執行器可以縱向布局,最大限度利用腿部內部空間,布置更大更長 的電機,提供更大的推動力。2)具備自鎖能力。線性執行器的螺桿傳動機構通過合 理設計可以具備自鎖能力,即下半身不動時可以自動鎖定姿態,不耗能,形成一個 低功耗且穩定的底部支架。3)低能耗,高負載。上肢的肘關節屈伸采用線性執行器 的理由和腿部原理一致,低耗能高推力。前臂的兩個線性執行器構成并聯關節主要 目的是降低腕關節的尺寸。纖細的腕關節有兩個好處:一是在抓握時降低關節與工 件的干涉,提高抓握路徑的靈活性;二是降低前臂對視覺構建及視覺位置反饋的干 擾,提升控制精度。 采用行星滾柱絲杠,可以輸出高精度和高承載能力。行星絲杠的節距可以做的很小, 所以很容易通過小扭矩實現大推力,電機的功率和體積可以小一些。電機的轉子集 成到了螺母上,整體結構更為緊湊。2.2Kg 的執行器輸出可達 8000N,推力密度高。
人形機器人旋轉執行器:需求彈性及供給能力分析
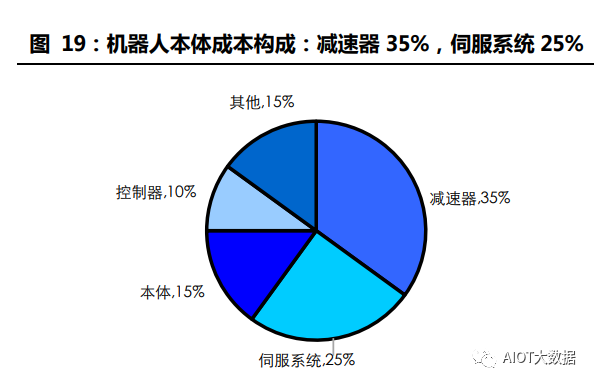
減速器在工業機器人中成本構成占比 35%,價值量最高,預計在人形機器人中價值 量依然會占到較高比重。工業機器人的控制過程是:控制器發指令給伺服驅動,驅 動伺服電機旋轉,通過減速機執行動作,在工業機器人上游的三大部件中,減速器 成本占比最高 35%,伺服系統(伺服電機+伺服驅動器)、控制器,分別占比 25%、 10%。
人形機器人產業化對諧波減速器需求的敏感性分析
2017~2021 年精密減速器(諧波+RV)銷量從 49 萬臺增長至 101 萬臺,復合增 速19.8%,工業機器人用精密減速器銷量從41萬臺增長至84萬臺,復合增速19.5%。 2021 年占比 82%。2018~2021 年精密減速器市場規模從 57.7 億元增至 59.5 億 元,復合增速 1%,這與國產替代速度加快,均價下行有關。 人形機器人運動執行部件可能采用諧波減速器作為主要的執行部件之一,我們假設 人形機器人不同年銷售規模,對諧波減速器的需求彈性進行敏感性分析。核心假設: 1)本次測算假設人形機器人年銷量在 10~100 萬臺之間; 2)單臺人形機器人配置諧波減速器 14 個; 3)馬斯克在特斯拉的開放日上提出,特斯拉人形機器人最終售價將下降到 2 萬美金 以下,與目前產業鏈的成本來看,有很大降本空間。我們暫時無法對產業鏈各環節 成本下降的幅度和速度做出假設,我們認為,技術成熟及產業鏈成本下降是產業化 的前提,規模化是技術成熟和成本下降后的必然。
從目前已知的信息來看,人形機器人采用 RV 減速器的概率相對比較小。因此我們 不對 RV 減速器進行敏感性分析。預計 RV 減速器未來的主要應用場景還將是在工 業機器人上。
諧波減速器供給格局:國產化提速
哈默納科是目前世界最大的諧波減速器生產商,全球市場份額超過 80%。諧波傳動 最初用于美國航天運動控制,谷川齒輪將其引入日本并量產,于 1970 年成立哈默 納科。經過五十余年的技術迭代、海外版圖擴張,哈默納科壟斷了全球諧波減速機 市場份額,產品矩陣愈加豐富,包括精密減速機(諧波減速器、減速器組件和行星 減速器)和機電一體化產品(執行器、控制器)。2021 年哈默納科營業收入 570 億 日元,2000~2022 年均復合增速 8.3%,與全球工業機器人行業增速基本一致。毛 利率穩定在 40%左右,凈利率維持在 20%以上。
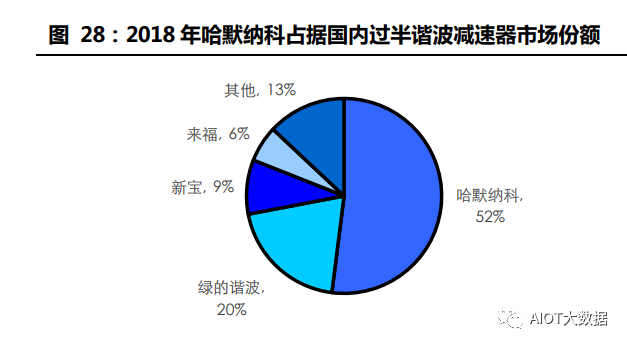
國內諧波減速器發展迅速,綠的諧波率先打破壟斷,同川、大族緊追其后,雙環、 中大力德、國茂股份開始入局。我國諧波減速器廠商起步較晚,受益于我國工業自 動化對工業機器人的旺盛需求,國產諧波得以快速發展,近年來國產替代腳步加快。 2021 年,哈默納科占中國諧波減速器 38%的市場份額,相較 2018 年 52%的市場 份額顯著下降。以綠的諧波為代表的國產諧波減速器份額提升明顯,隨著行業德蓬 勃發展,國內入局新玩家增多,日本新寶、臺灣來福份額穩定,同川、大族等企業 也占據了一定的市場份額,中大力德、國茂股份、光洋股份也加入競爭,國內產能 建設提速。 國產諧波以價換量,高端產品技術突破成為關鍵。諧波減速器結構簡單,在低壽命 的要求下門檻較低。疫情下外資廠商供貨周期長,國產品牌把握住市場窗口期快速 放量,但產品多集中在中低端市場。國內企業依托本土優勢可以提供低價諧波,2021 年均價 2000 元左右,哈默那科諧波進口單價多在 8000 元及以上,國內企業以一 定的價格優勢在銷量上表現亮眼。根據 MIR,2021 年綠的諧波、來福減速器銷量分 別為 17.8 萬、9.5 萬臺,遠超過哈莫納科的 3.5 萬臺。
RV 減速器供給格局:國產品牌正在突圍
納博特斯克是世界上最大的 RV 減速器制造商,全球市場份額超過 60%。博特斯克 的前身是日本帝人制機和納博克株式會社,于 2003 年合并成為控股公司納博特斯 克的全資子公司。1980 年,日本帝人精機將 RV 減速器應用于機器人行業,解決 了工業機器人存在容易受沖擊損壞、手臂振動等問題;1986 年開始被大規模化應 用于工業機器人,趕上日本“機器換人”的浪潮,奠定了其行業領先地位。 納博特斯克營收逐年穩健增長,2003~2022 年均復合增速為 4.9%。營收從 2003 年 1250 億日元增長至 2022 年 3080 億日元,2022 年毛利率為 5.9%,凈利率為 24.8%。
2021 年納博特斯克在中國的份額為 52%,國產品牌份額超過 30%,規模靠前的企 業有中大力德、秦川機床、南通振康、珠海飛馬、智同科技等。南通鎮康 2010 年研 制出第一臺 RV 減速器,雙環傳動、中大力德分別于 2013 年前后開始研發工業機 器人精密減速器。經過十余年的技術積累和產品品類拓展,雙環傳動市場份額提升 明顯,從 2018 年的 7%提升至 2021 年的 15%,國內規模靠前的企業有中大力德、 秦川機床、南通振康、珠海飛馬、智同科技等。
機器人用軸承供給格局:主要依靠進口
工業機器人專用軸承主要有等截面薄壁軸承、薄壁交叉圓柱滾子軸承、RV 減速機軸 承及諧波減速器用柔性軸承等,它們大多采用非標準、多滾動體等設計原則。
國內工業機器人配套軸承大部分依靠進口,國內少數廠家雖然生產制造工業機器人 配套軸承,但批量小、品種規格少,零部件通用化程度低,供貨周期長,成本髙, 質量不穩定。近年來,我國軸承廠商的制造能力有顯著提升,從事機器人配套軸承 研發的主要廠商有:人本軸承、國機精工、洛陽 LYC 軸承公司、北京諧波技術研究 所、洛陽匯工軸、五洲新春。
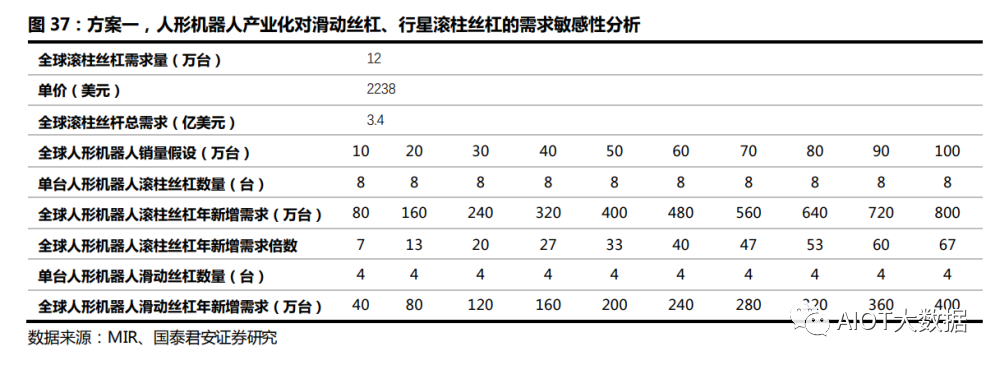
線性執行器:需求彈性及供給能力分析
人形機器人產業化對線性執行器的需求敏感性分析
2022 年全球滾珠絲杠市場規模 20.4 億美元,如果不考慮人形機器人產業化,預計 行業將保持低速穩定成長,預計到 2029 年市場規模 30.9 億美元,2023 年至 2029 年復合增速為 6.1%。亞太地區具有最大的消費市場,占有 58%的市場份額,其次 是歐洲。 我們假設人形機器人不同年銷售規模,對滾珠絲杠、滾柱絲杠、滑動絲杠的需求彈 性進行敏感性分析。核心假設:1)本次測算假設人形機器人年銷量在 10~100 萬臺之間; 2)單臺人形機器人配置諧波減速器 14 個; 3)特斯拉目前尚未公布其線性執行器具體方案,我們猜測可能的方案分為兩種: 方案一:4 個滑動+8 個行星滾柱絲杠;方案二:14 個滾珠絲杠; 4)馬斯克在特斯拉的開放日上提出,特斯拉人形機器人最終售價將下降到 2 萬美金 以下,與目前產業鏈的成本來看,有很大降本空間。我們暫時無法對產業鏈各環節 成本下降的幅度和速度做出假設,我們認為,技術成熟及成本下降是產業化的前提, 規模化是技術成熟和成本下降后的必然。
滾珠絲杠供給格局:高端外資主導,中低端完成國產替代
滾珠絲杠的主要供應商集中在日、德、臺地區,NSK 占據全球最大的滾珠絲杠份額。 全球市場被日本 NSK、日本 THK 等企業壟斷,CR5 約 46%,日本和歐洲企業合 計占據了全球約 70%市場份額。國內市場上銀、銀泰占有率接近 50%,NSK、THK 市場占有率約 15%,國內企業占有率約 25%。 國產企業起步晚、產業規模小、產品豐富度低、生產效率低,尚未形成有國際影響 力的品牌,主要廠商:南京工藝、博特精工、合肥賽里斯(江蘇雷利)、鼎智科技(江 蘇雷利)、華歐精密等。國產滾珠絲杠在中低端應用已經基本實現了國產替代,產品 豐富度和技術指標和外商差距不大。在高端產品上,滾珠絲杠的精度、最高速度、 噪音、溫升等控制方面以及精度保持性還有待提升,在細分高端市場,國產滾珠絲 杠副開始在機床企業批量使用,如秦川機床,海邁克精密。貝斯特和恒力液壓也在 布局相關產品。
滾柱絲桿供給格局:國內處于起步階段
70 年代,隨著武器裝備技術及石油、化工、數控機床等對大推力、高精度、高效率、 長壽命的需求提升,行星滾柱絲杠開始被大規模使用。1970 年起,瑞士 ROLLVIS 公司(后被 GSA 收購)致力于行星滾柱絲桿產品的制造與研究。美國的 EXLAR 公 司將行星滾柱絲杠作為六自由度并聯機構的傳動裝置,研制出了一種新型的電推桿, 行星絲杠商用開始加速,目前主要應用于航空航天、武器裝備等軍事領域和數控機 床、工程機械等民用領域。 行星滾柱絲杠市場,全球主要制造業國家與瑞士差距大。國外具備生產行星滾柱絲 杠能力的企業主要有 GSA、SKF、EWELLIX、MOOG 等。GSA 公司是產品系列最 全、規模最大的行星滾柱廠商,在裝配、加工工藝、材料及熱處理工藝上有深厚的 積累,從產品覆蓋規格、生產規模到產品生產經驗積累對其他地區形成碾壓優勢。
國內行星滾柱絲杠處于起步階段,僅有幾家企業具備小批量生產能力,包括:博特 精工、常州思科瑞、南京工藝等。2010 年,博特精工、南京工藝、常州思科瑞等國 產廠商投入行星絲杠的研發,目前已具備小批量生產的能力,國產行星絲杠在承載 能力、產品尺寸覆蓋范圍上還有差距,產業化、規模化水平處于早期階段。
技術壁壘:設計、材料、工藝、加工
減速器、絲杠、軸承等精密產品和零部件的技術壁壘都體現在設計、材料、工藝和 加工精度上。最終體現在產品性能上表現為產品的精度保持度、壽命、故障率等。 國產減速器同海外產品性能的差距體現在壽命和精度保持性上。在效率、減速比、 傳動精度、扭矩剛度等關鍵指標參數上,國產減速器已經基本達到了國際領先的產 品水平,但是在疲勞壽命、故障率、批量產品的穩定性等方面有差距。根據官網數 據,納博特斯克銷量最高的 RV-C 和 RV-E 系列都具有更高的額定輸出轉矩和減速 比,壽命可以達到 6000 小時以上。與國外產品相比,國產減速器長時間使用后仍 有出現的磨損、漏油、精度下降的情況;國產諧波減速器在高速場景下容易出現斷 裂的現象,產品穩定性和使用壽命上仍需提升。
減速器性能不僅與嚙合原理、齒形設計、結構優化等相關,還與原材料、加工、熱 處理工藝等因素相關。在效率、減速比、傳動精度、扭矩剛度等關鍵指標參數上, 國產減速器已經基本達到了國際領先的產品水平,但是在疲勞壽命、故障率、批量 產品的穩定性等方面有差距,不僅與嚙合原理、齒形設計、結構優化等相關,還與 原材料、加工、熱處理工藝等因素相關。本章我們將主要以諧波減速器為例,來說 明高精度核心部件的技術壁壘。
諧波傳動技術包括:總體結構、柔輪、剛輪、凸輪、柔性軸承、交叉滾子軸承、齒 形、波發生器、加工制造和試驗方法等 10 個分支。從專利申請數量來看,總體結 構、波發生器、柔輪和加工制造是諧波減速器技術的研發重點。
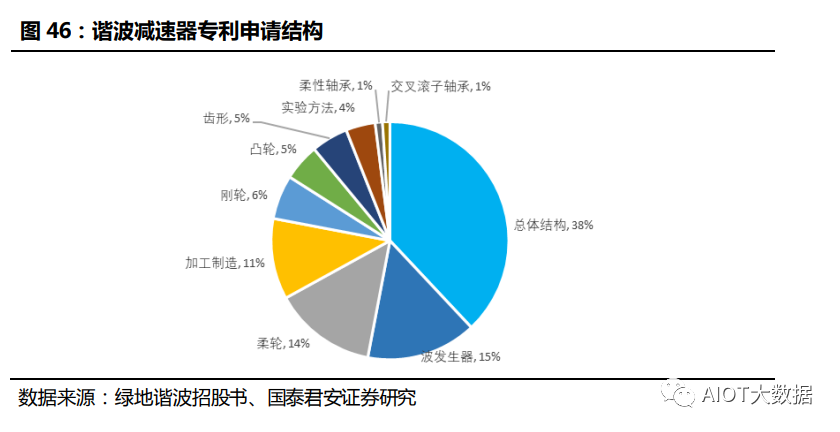
1)波發生器(柔性軸承):減速機廠家一般是從軸承廠家買來標準的柔性軸承,通 過質檢后,再壓到自己設計加工的凸輪中變成波發生器。凸輪:雖然采用廠家標準 品對于貨期和價格都會比較好,但是由于采用電機的軸徑、長度、安裝方式的不同, 不少廠家都會對凸輪提出定制要求。進口品牌對減速機大都會進行深度定制,而當 前國產品牌的規模較小,很難進行定制。柔性軸承的核心問題是材料與熱處理問題。 既要承受球體的壓力又要承受高速運動的變形。太軟,溝道容易受損,太硬,軸承 容易斷裂。凸輪方面主要是加工問題,其實國產當前的加工水平完全可以滿足要求, 但是后期批量之后如何選擇加工工藝以達到最佳性價比。
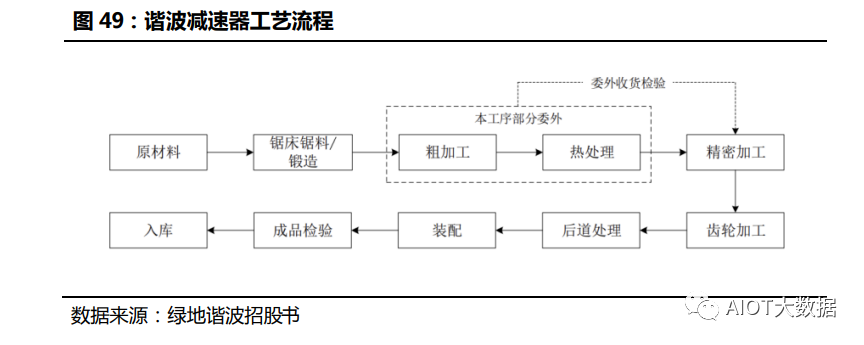
2)剛輪:主要生產過程包含下料——熱處理——外形加工——齒加工等。打樣一 般會采用 40Cr 棒料加工,量產階段采用球墨鑄鐵,進口為主,主流廠商進行包爐,。 批量生產普遍采用滾齒,成型之后,對齒會進行加強處理,主要采用噴砂或者滲氮 工藝,目的是加硬跟耐磨。
3)柔輪:常用的材料是 40CrNiMoA,也有不同的微量添加。廠家一般是采用棒料 下料后經過鍛造后再加工,相比剛輪,柔輪的加工最大的難點有三:一是柔輪精加 工時的壁很薄,要防止變形和抖動,需要有專門的治具把內壁撐起來;第二是要決 定控制竄刀量保證柔性軸承壓入后剛好把齒撐起來;第三是齒的修型問題。天下齒 型出 HD,只有極個別廠家有能力設計新的齒型。
4)交叉滾子軸承:諧波減速器專用十字交叉軸承具有很高的剛度、旋轉精度以及復 合承載能力,外形緊湊。精密軸承是制造業關鍵零部件,機器人配套軸承是軸承應 用的一個細分市場。機器人用精密軸承包括:諧波減速器專用十字交叉軸承、柔性 軸承、RV 減速器軸承、交叉滾子軸承、等截面薄壁軸承等。
5)油封及潤滑:是非常成熟的零部件,但大廠常會對油封做定制以提升性能。諧波 的潤滑分成油潤滑和脂潤滑兩種方式,油潤滑,流動性好,潤滑就好,熱傳導也好, 可以提升轉速,但對于密封的要求非常高,目前只有 HD 有采用油潤滑,因此只有 HD 可以做高速諧波。除了 HD 外,其他廠家普遍采用脂潤滑。
設計:齒形設計和傳動結構設計是關鍵
諧波:綠的、來福的齒形設計和傳動結構避開了哈默納科的專利。諧波龍頭哈默納 科先發制人,在齒形設計和傳動結構方面申請了專利,國產減速器廠商綠的諧波的 P 齒形、來福諧波的δ齒形率先打破壟斷,基本滿足諧波減速器的性能需求,但新進 入廠商很難在避開專利限制的情況下設計優良性能的齒形。 RV:擺線齒輪修形理論不完善。國內企業對于擺線齒輪修形原理大多基于經驗數據, 沒有足夠的完整的理論基礎,導致齒型修形要不斷的嘗試改進,增加研發時間,且 改進效果并不明顯;RV 減速器構成復雜,零部件在設計上的配合和細節參數的優化 都是影響減速器精度的重要因素。
材料及零部件:長期依賴進口
諧波減速器:柔輪材料長期依賴進口。國內外的諧波減速器柔輪材料基本為 40Cr 合 金鋼,其中 40CrMoNiA 與 40CrA 最為常用,晶粒和鐵氧體相的不合理會導致局部 微裂紋和尺寸精度的變化,對材料的純度要求高。相同的原材料,由于國外提純技 術較高、雜質少,因此國產諧波減速器的材料長期依賴進口。
RV 減速器:國產軸承在精度上仍有較大的差距。RV 減速器的原材料包括齒輪鋼 (20CrMnTi、20CrMo、20MnCr5 等)、軸承合金等。國內齒輪鋼的生產水平已達 到國外先進的水平,比起日、德、美生產的齒輪鋼還有一些差距(淬透性寬、純度 低等)。外購零部件:部分廠商在軸承、密封圈、滾針、擋圈等零部件會選擇外購, 軸承是影響產品精度的一大關鍵因素,而國產的軸承在精度上仍有較大的差距。
工藝:需要經驗積累
熱處理工藝是提升減速器疲勞壽命、精度穩定性的關鍵環節。按照目的不同,熱處 理工藝一般分為預備熱處理和最終熱處理,預備熱處理用于改善材料的加工性能, 消除內應力,主要工藝包括退火、正火、時效、調制等;最終熱處理的目的在于改 善材料的硬度、耐磨性等,提升減速器疲勞壽命、穩定性,主要工藝包括淬火、滲 碳淬火和滲氮處理等。 諧波:柔輪失效是諧波減速器的主要失效形式之一,限制著諧波減速器的使用壽命: 柔輪壁薄,同時需承受波發生器和外部載荷的雙重作用,良好的熱處理工藝是保證 材料結構組織一致的必要前提。國產廠商在柔輪的熱處理工藝、慢走絲、連續切割 等加工工藝上存在差距,這也是決定減速器精度和壽命的核心。
RV:設計更復雜,其中擺線輪、偏心軸、針齒殼等核心部件的加工均有很大的難度, 核心難點在于各項工藝的密切配合,包括:加工精度、零件對稱性、成組技術、裝 配精度等。熱處理技術是國產廠商的一大軟肋,技術不過關會導致產品變形、硬度 不夠。工藝的差距帶來的是產品精度、損耗速度和壽命的差距。這也對操作人員的 技術提出了高要求,需要其能根據各種條件的變化,及時調成,保證成品率。
滾珠絲杠的制造工藝主要是兩種:軋制和磨制,其中軋制屬于批量制造,能達到的 精度較低,但生產效率高,設備門檻高于磨制。我國磨制絲杠發展比較早,非標要 求高,規格產品也算齊全,從一開始的只能滿足部分非標需求發展到現在基本滿足 所有使用場合,在低噪音,低摩擦,重載低速,高速,還有某些如注塑機的重載專 用絲杠,基本已經完全國產化了。而軋制絲杠起步較晚,直到近年才形成整個體系 產業鏈,并且已經實現對低端的中國臺灣品牌替換。并且有部分細分產品如小導程, 特殊材料,機電集成化絲杠已經基本形成成體系的產業鏈。
關鍵設備依賴進口:熱處理、磨齒機、三坐標等檢測設備
磨齒機、高精度三坐標檢測設備、齒輪檢測設備是提升減速器齒輪精度的關鍵設備。 諧波減速器加工過程需要用到齒輪加工機床、三坐標測量機、加工中心、磨床、車 床、熱處理設備等。RV 減速器加工設備包括齒輪加工機床、加工中心、車床、磨床、 硬拉床、三坐標測量機、熱處理設備等,實際工況中 RV 減速器需要反復精確定位, 對加工設備精度要求高,否則會造成產品的磨損。 a. 加工設備:核心零部件(例如偏心軸、擺線輪、針齒殼、行星架等)的末道精加 工設備依賴進口, 對核心關鍵設備僅限于使用層面,在面對工藝上有新的需求或需 要不斷優化的時候,國產廠商就無法快速反應。 b.專用工裝:設備供應商一般不會提供一整套高精度的工裝設備,因此自主設計制 作的工裝是加工出高精度零部件又一關鍵因素; c. 檢測設備:高精度三坐標檢測設備和齒輪檢測設備,及相關的材料檢測設備,確 保齒確保齒輪質量和尺寸控制準確無誤,是高精度 RV 減速器的關鍵。
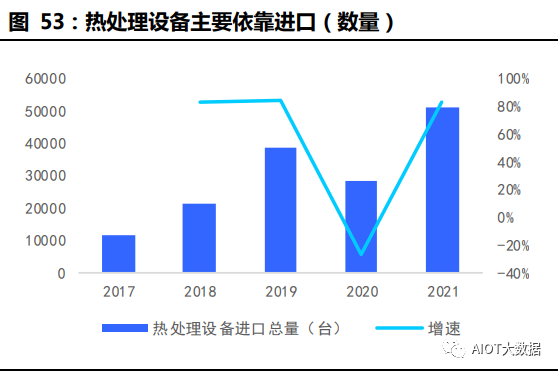
熱處理設備
國內中高端熱處理設備依賴進口。減速器熱處理產線通常為定制化,部分企業委外 加工,國內熱處理行業發展水平較低,中高檔熱處理設備長期依賴進口,2017-2021年中國熱處理設備制造行業進口額在 2000 萬美元左右波動,2019-2021 年中國熱 處理設備制造行業進口金額逐年上升,2021 年實現進口金額 23391.03 萬美元,同 比上升 16.10%。2017~2021 年進口數量年增長率始終保持在 80%以上,21 年達 到 51404 臺,同比增長 83.36%。
國產熱處理設備在設備穩定性、信息化程度、產線集成能力等方面還存在差距,部 分廠家部分設備技術水平已經接近國外中高端產品水平。海外領先的熱處理設備及 服務公司包括:愛協林、應達、易普森、易孚迪、日本高周波、德國 ALD 等。國內 感應熱處理裝備制造商綜合實力較強的公司為:上海恒精機電設備有限公司,天津 天豐淬火設備有限公司,洛陽升華感應加熱股份有限公司,十堰恒進科技有限公司, 十堰天舒機電科技有限公司。其中,上海恒精機電設備有限公司,洛陽升華股份有 限公司,十堰恒進科技有限公司的一些設備技術水平已經接近國外中高端產品水平, 逐漸替代進口產品。
高精度磨床
高精度磨床長期依賴進口,秦川機床、重慶機床、南二齒是磨齒機國產替代龍頭。 按照齒輪加工工藝分,齒輪機床可分為滾齒機、插齒機、銑齒機、剃齒機、珩齒機、 磨齒機等系列,齒輪加工工序復雜,不同工序對精度要求不同。一般來說,決定減 速器齒輪精度的工序為熱處理后的精加工階段,以磨齒機為主(未經過磨齒的齒輪 最高只能達到 6 級精度,而磨齒機加工過的齒輪最高可達 2 級精度),設備長期依 賴進口,如萊斯豪爾、格里森、卡帕耐爾斯、日本電產等。秦川機床是國內磨齒機 龍頭,有望實現高端設備的國產替代,其 YKS7225 雙工位高效磨齒機精度可達國標 GB/T10095-2008 的 4 級;重慶機床、南二齒也具備磨齒機生產能力,其中重慶機 床 YS7232/YS7232G 高精密數控蝸桿砂輪磨齒機批量加工精度可達 4-5 級。
高精度三坐標、高精度齒輪檢測設備
高精度三坐標國內與國外產品的差距主要體現在三個方面:1)從精度等級上看,進 口精密計量型測量機能達到 0.5 微米以內的檢測精度,而國產設備最高僅能達到 0.8 微米,且測量行程低于進口機型。2)進口機型從結構設計到材料呈現多方向發展狀 態,而國內多家廠商的產品在結構和材料上幾乎完全相同,缺少創新能力;3)進口 機型的控制系統、測頭及測量軟件等一般都具有自主知識產權,掌握全部或大部分 核心技術;而大多數國產機型除機械本體外,關鍵組成部分采用國外品牌,自主研 發能力較弱,缺少核心技術。國際比較著名的測量機生產廠家主要有瑞典海克斯康、 德國蔡司、德國溫澤以及日本三豐等,其中計量型測量機市場主要被蔡司、海克斯 康壟斷。我國三坐標測量機的主要生產廠商有 303 所、西安愛德華、青島雷頓、集 萃華科等。
產品 SKU 豐富度與客戶粘性
國內減速器廠商在產品矩陣的豐富度(SKU)上不及海外廠商,需要時間和技術積 累。哈默納科、納博均已成立超過半個世紀,在減速器品類上有深厚積累,其中哈 默納科諧波減速器產品覆蓋 15 個系列共 49 款諧波減速器,包括空心軸減速機、微 型減速機等眾多樣式;相比之下,綠的諧波產品包括 6 個系列共 19 款產品。納博 特斯克產品覆蓋 3 個系列共 25 款 RV 加速器,雙環傳動旗下包括 2 個系列共 12 款 RV 減速器。無論是 RV 還是諧波,國產廠商在品類豐富度上均有所差距,且并非能 短期彌補,需要技術、專利、時間的積累。
-
機器人
+關注
關注
210文章
28205瀏覽量
206532 -
產業鏈
+關注
關注
3文章
1350瀏覽量
25661 -
ChatGPT
+關注
關注
29文章
1548瀏覽量
7495
原文標題:人形機器人發展及產業鏈分析
文章出處:【微信號:AIOT大數據,微信公眾號:AIOT大數據】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

廣和通成功入選2024人形機器人供應鏈優質企業
分析 丨人形機器人需要什么樣的BLDC電機控制芯片?
優必選助推人形機器人產業發展
人形機器人產業發展機遇與挑戰并存
高動態人形機器人“夸父”通過OpenHarmony 3.2 Release版本兼容性測評
人形機器人主要環節及產業鏈分析






 工商網監
工商網監
評論